【ROS 2】Raspberry Pi Imagerを使ってmicroSDカードにOSを書き込む[Ubuntu Server 24.04.3 LTS(64-bit)]

Raspberry Pi Imagerを使って、Raspberry Pi 5のブートストレージであるmicroSDカードにOSを書き込む手順を解説します。microSDカードに書き込むOSは[Ubuntu Server 24.04.3 LTS(64-bit)]です。本記事では、A2クラスのmicroSDカード(64GB/Raspberry Pi純正)を使用します。
(1) Raspberry Pi Imagerのダウンロードとインストール
カードリーダーを搭載したパソコンからRaspberry Pi softwareへアクセスします。パソコンのOS(Windows/macOS/Linux)に合わせて、Raspberry Pi Imagerのダウンロードリンク(本記事では[Download for Windows])をクリックします。
ダウンロードされたインストール用ファイル(本記事では[imager-1.9.6.exe])を実行します。
使用する言語を選択して[OK]をクリックします。

[Next]をクリックします。
[License Agreement]を読んで、同意できる場合は[I accept the agreement]にチェックをつけて[Next]をクリックします。
デスクトップにショートカットアイコンを作成する場合は[Create a desktop shortcut]のチェックをつけたまま[Next]をクリックします。
インストールが完了するまでしばらく待ちます。
Raspberry Pi Imagerをすぐに起動する場合は[Launch Raspberry Pi Imager]のチェックをつけたまま[Finish]をクリックします。

(2) OS[Ubuntu Server 24.04.3 LTS (64-bit)]の書き込み
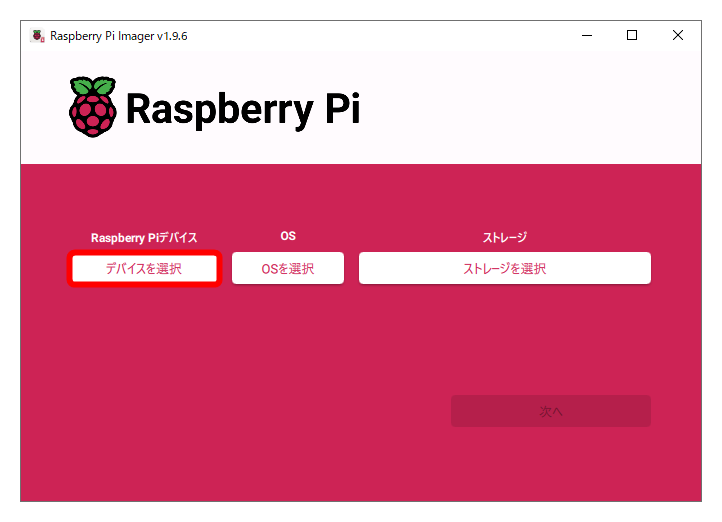
Raspberry Pi Imagerを起動します。インストールの最後で[Launch Raspberry Pi Imager]にチェックをつけたまま[Finish]をクリックした場合は、すでに起動しています。
[デバイスを選択]をクリックします。
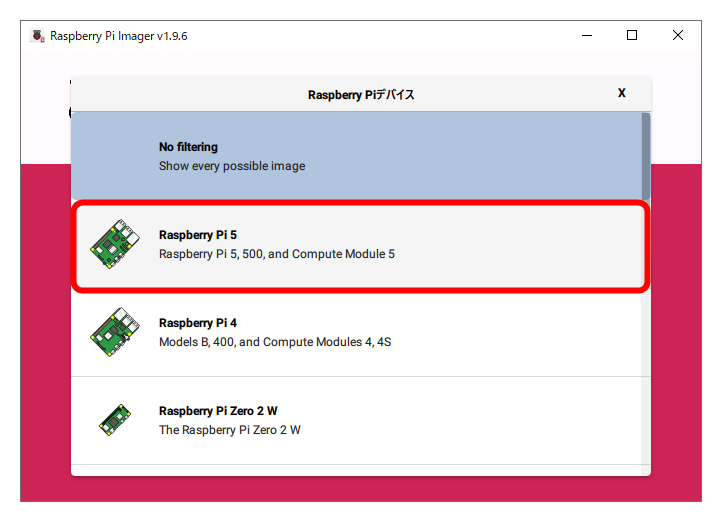
[Raspberry Pi 5]をクリックします。
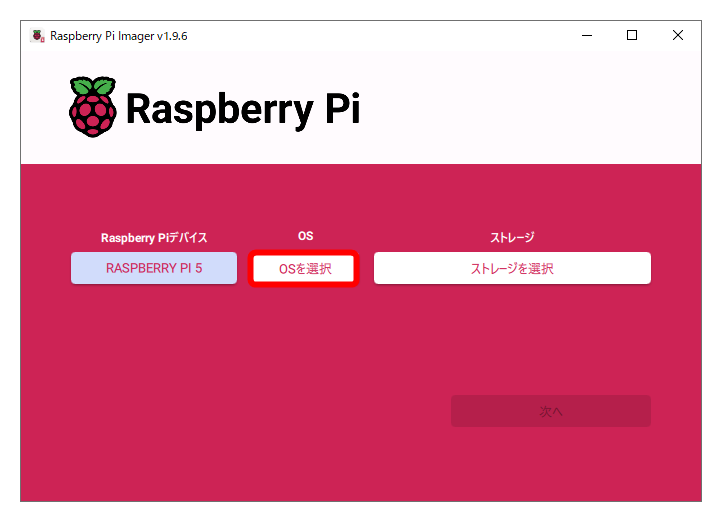
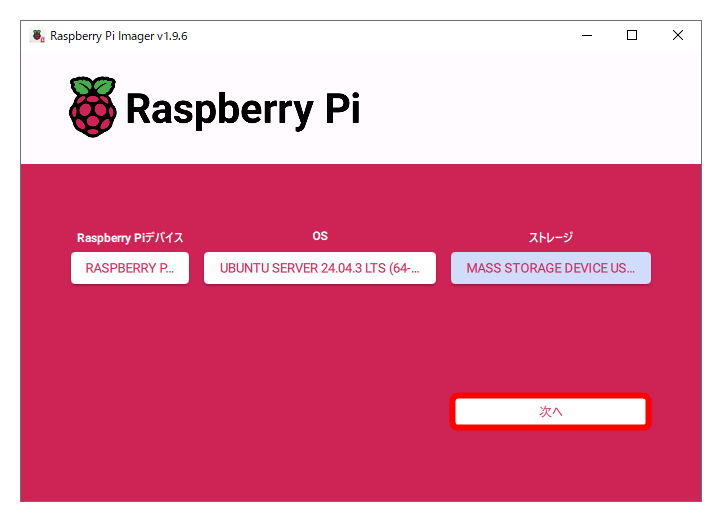
Raspberry Piデバイス欄に[RASPBERRY PI 5]と表示されていることを確認します。次に[OSを選択]をクリックします。
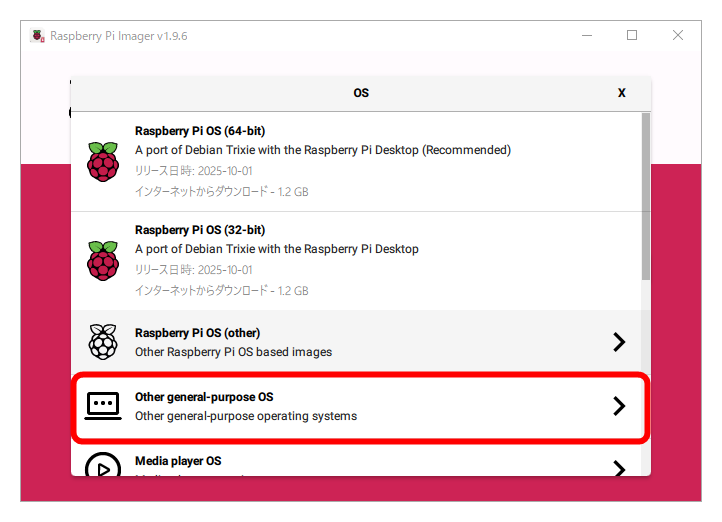
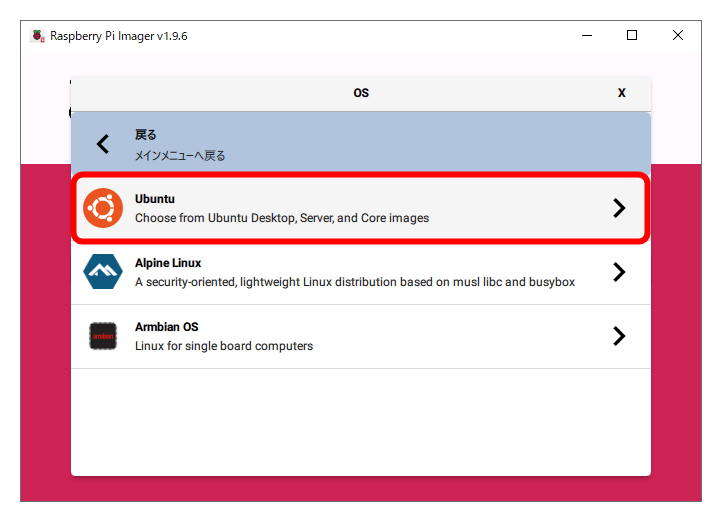
[Other general-purpose OS]をクリックします。
[Ubuntu]をクリックします。
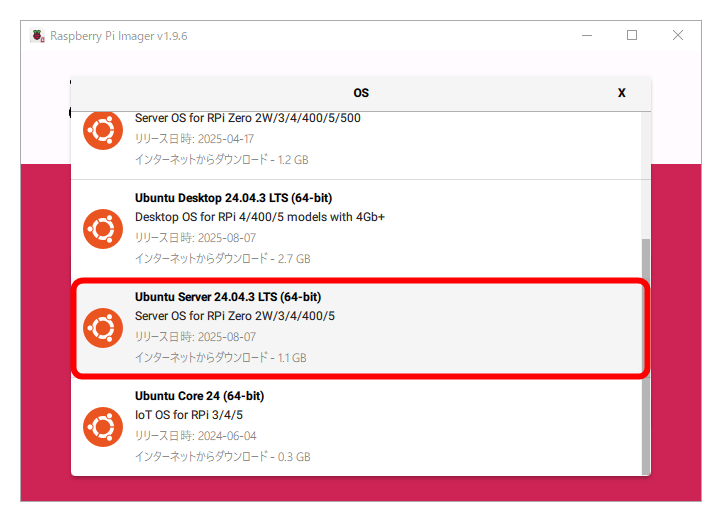
[Ubuntu Server 24.04.3 LTS(64-bit)]をクリックします。
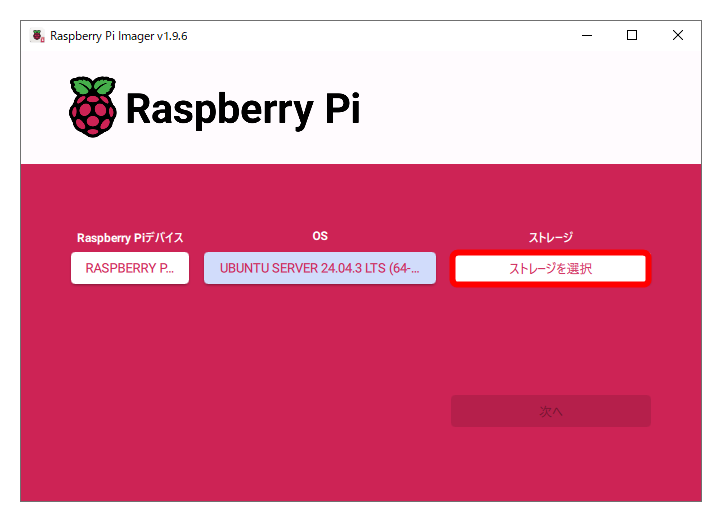
OS欄に[UBUNTU SERVER 24.04.3 LTS(64-...]と表示されていることを確認して[ストレージを選択]をクリックします。
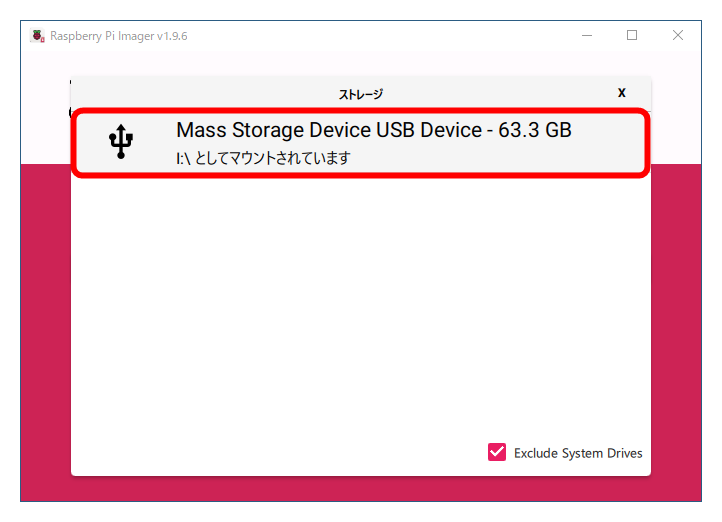
パソコンのカードリーダーに挿入しているmicroSDカードをクリックします。間違えないように、容量やマウントされているドライブ名をしっかり確認します。
ストレージ欄に選択したmicroSDカードが表示されていることを確認して[次へ]をクリックします。
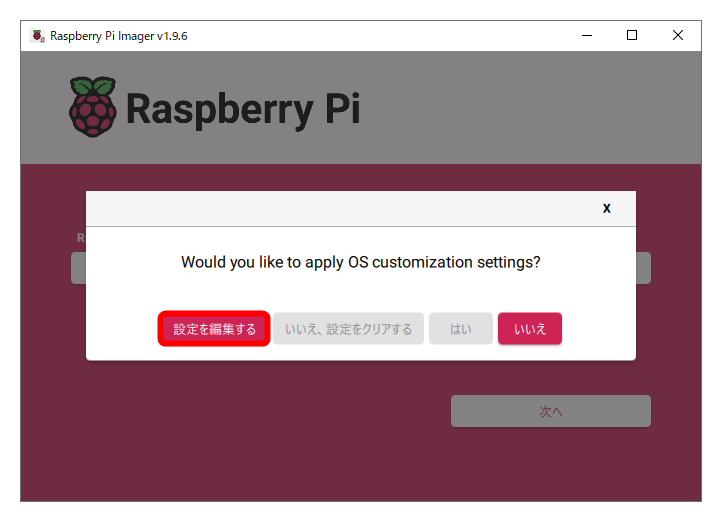
あらかじめ、ホスト名やユーザー名などを設定することができます。本記事では、設定するので[設定を編集する]をクリックします。
[一般]タブで設定できる項目です。ホスト名(本記事では[pi5-01])・ユーザー名(同[admin])は一例です。お好みで入力しましょう。Wi-Fiを設定しておくと、起動時にDHCPで接続します。ロケール設定では、環境に合わせて、タイムゾーン(本記事では[Asia/Tokyo])・キーボードレイアウト(同[jp])を選択します。
![図2-12.[一般]タブ](/and-more/images/ros2/raspberry-pi-imager/raspberry-pi-imager-20.png)
[サービス]タブで設定できる項目です。外部からSSHで接続する場合は[SSHを有効化する]にチェックを付けて、適切な認証方式を選択します。本記事では[パスワード認証を使う]を選択します。
![図2-13.[サービス]タブ](/and-more/images/ros2/raspberry-pi-imager/raspberry-pi-imager-21.png)
[オプション]タブで設定できる項目です。この項目は、Raspberry Pi Imagerの動作に関するものです。[テレメトリーを有効化]は、Raspberry Pi ImagerやホストOSのバージョン、選択したOS名などの情報を匿名で収集する機能です。収集を希望しない場合は、チェックを外します。※参考URL:https://github.com/raspberrypi/rpi-imager/
![図2-14.[オプション]タブ](/and-more/images/ros2/raspberry-pi-imager/raspberry-pi-imager-22.png)
設定が完了したら[保存]をクリックします。
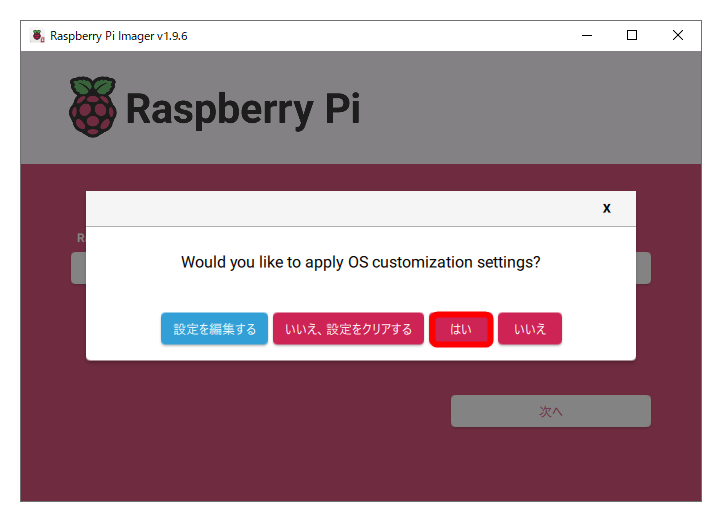
[Would you like to apply OS Customization settings?]のメッセージに対して[はい]をクリックします。
選択したストレージのすべてのデータが削除される旨のメッセージが表示されます。続ける場合は[はい]をクリックします。

書き込み準備中のメッセージが表示されます。しばらく待ちます。

続けて、書き込み中のメッセージが表示されます。しばらく待ちます。

書き込み完了後、確認中のメッセージが表示されます。しばらく待ちます。
書き込みが正常に終了した旨のメッセージを確認して[続ける]をクリックします。

右上の×をクリックして、Raspberry Pi Imagerを終了します。
カードリーダーからmicroSDカードを取り出します。以上で、microSDカードに[Ubuntu Server 24.04.3 LTS(64-bit)]が書き込まれました。
おすすめ


【改訂第2版】ROS 2とPythonで作って学ぶAIロボット入門
- 出版社
- 講談社
- 著者
- 出村公成・萩原良信・升谷保博・タンジェフリートゥチュアン
- 発売日
- 2025/2/14




Raspberry Pi 5プログラミング教育ロボット
Raspberry Pi 5ベースのROS 2(Humble)に対応したロボットカーです。4つの独立した駆動輪(エンコーダー付き金属製モーター)による走行、LiDARによるマッピング(SLAM)・2軸のカメラによるAI画像認識(OpenCV)などが行えます。






