【FT】Intelligent InterfaceをROBO Proで使う
フィッシャーテクニックのコントローラー「Intelligent Interface(1997)」を同社のビジュアルプログラミング環境である「ROBO Pro」で使うための手順を紹介します。
Intelligent Interface
Intelligent Interface
1997年に発売されたフィッシャーテクニックのコントローラー「Intelligent Interface」は、4つのデジタル出力(M1~M4)・8つのデジタル入力(I1~I8)・2つのアナログ入力(EX・EY)を持つプログラミング可能なコンピューターです。
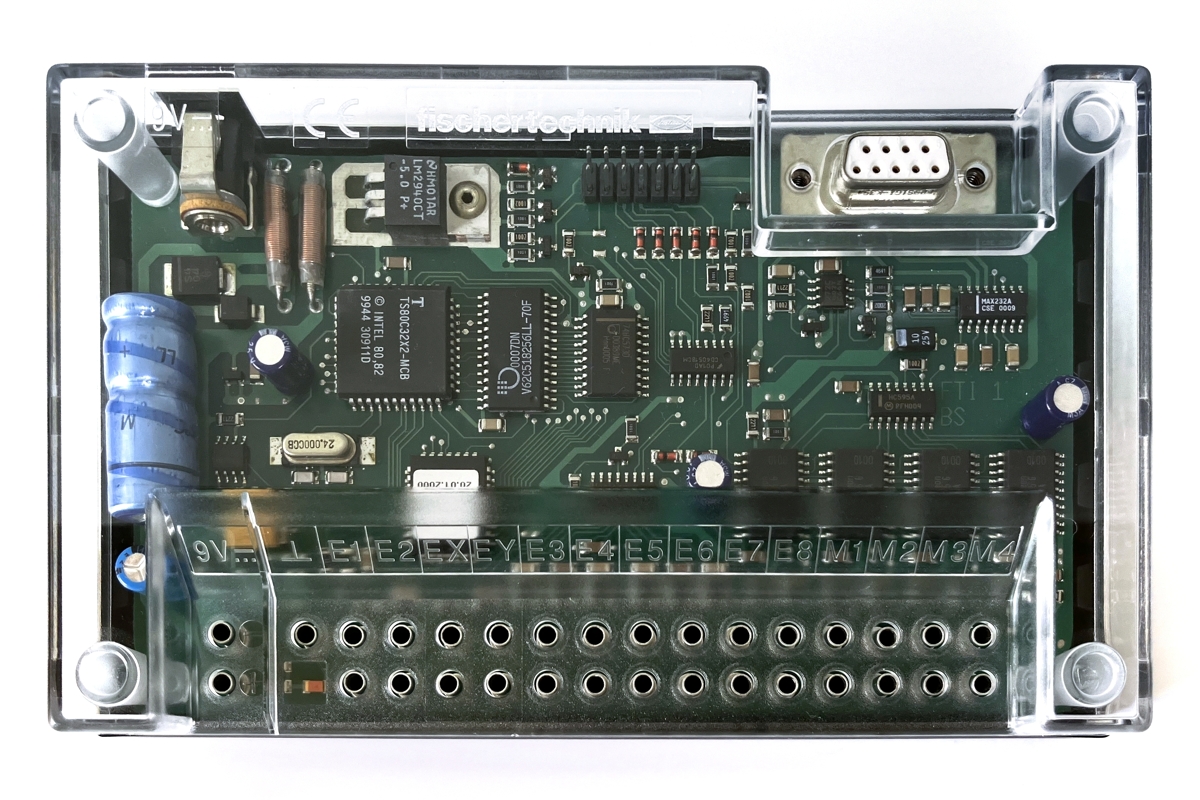
各種モーター・ランプなどの出力機器、押しボタンスイッチ・明るさセンサーなどの入力機器を、専用の端子が両端に付いたケーブルで接続します。

当時は「LLWin(Lucky Logic for Windows)」というビジュアルプログラミング環境が提供(インストールCDが同梱)されていましたが、本記事では現在でもダウンロード可能な「ROBO Pro」で「Intelligent Interface」を使う手順を紹介します。「ROBO Pro」のインストールは「【FT】ROBO Proのインストール」で紹介しています。
もともとフィッシャーテクニックは、ブロックにモーターやセンサーなどの機器を組み込むことで、実物のように動作する機械を作ることができる教育用の製品です。以下は、ブロックにモーター・ランプ・明るさセンサーを組み込むことで、手で光を遮るとモーター(プロペラ)が回転するハンドドライヤーの作り方です。当時「Intelligent Interface」とセットで販売されていた「Computing Starter」というハンドドライヤーなど8モデルを作ることができるキットからの引用です。右下に「Intelligent Interface」と各種機器の配線図が記されています。
Hand dryer
fischertechnik Computing Starter Assembly Instructions(Page 6-7) 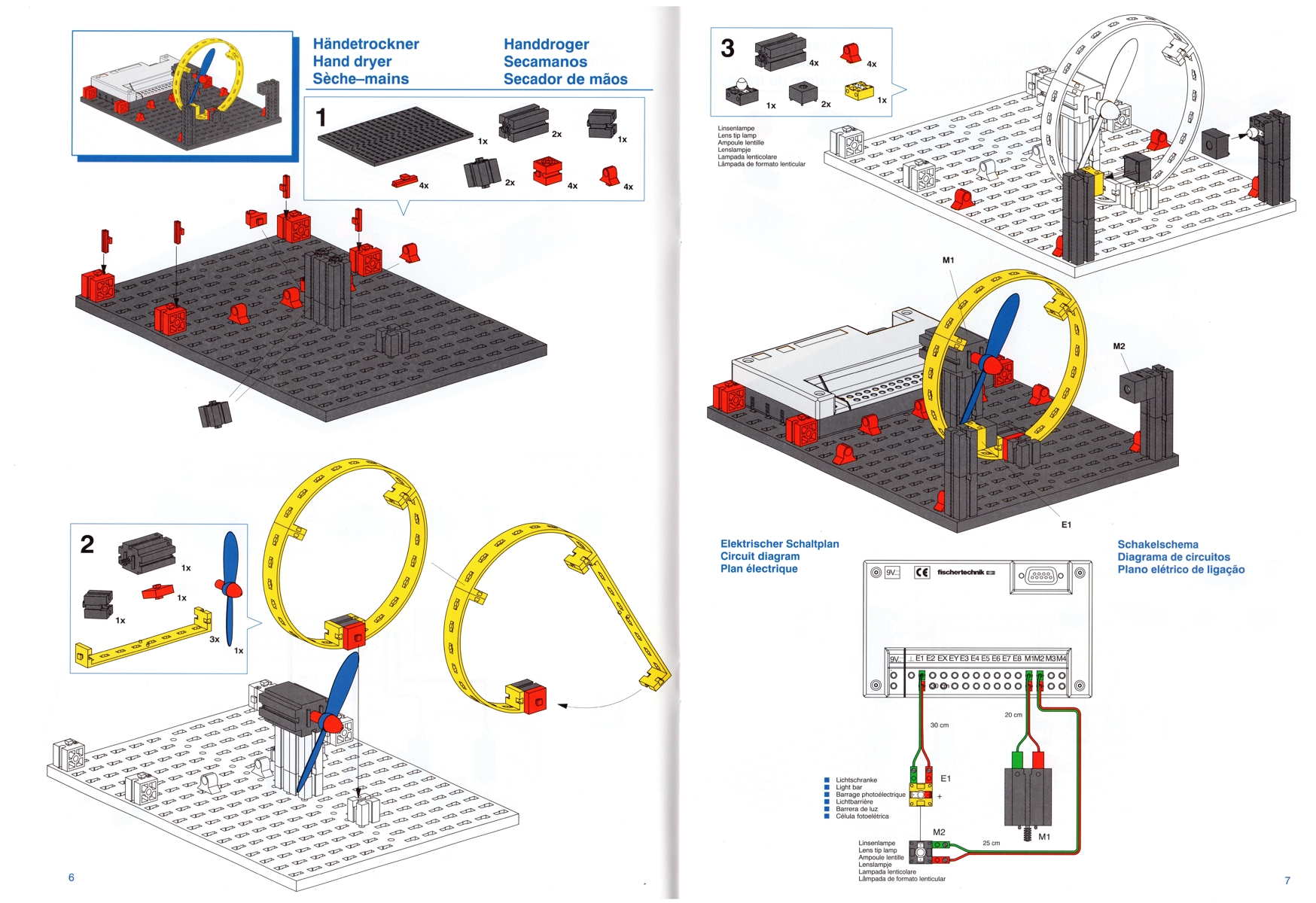
「ROBO Pro」で作ったハンドドライヤーのプログラムです。

Intelligent InterfaceをROBO Proで使う
Intelligent InterfaceをROBO Proで使う
「Intelligent Interface」は、パソコンと通信を行うためのシリアルポートとして、今ではレガシーなポートである「D-sub 9ピン(RS-232C)」を搭載しています。

現在販売されているほとんどのパソコンで、そのまま接続することができないので、USB-シリアル変換ケーブルを用意します。

「Intelligent Interface」への電源供給のため、フィッシャーテクニックのPOWER-BLOCK(9V)、または電源アダプター(9V、センタープラス)を用意して、いずれか一方のみを接続します。


USB-シリアル変換ケーブルのUSBコネクターをパソコンのUSBポートに接続します。
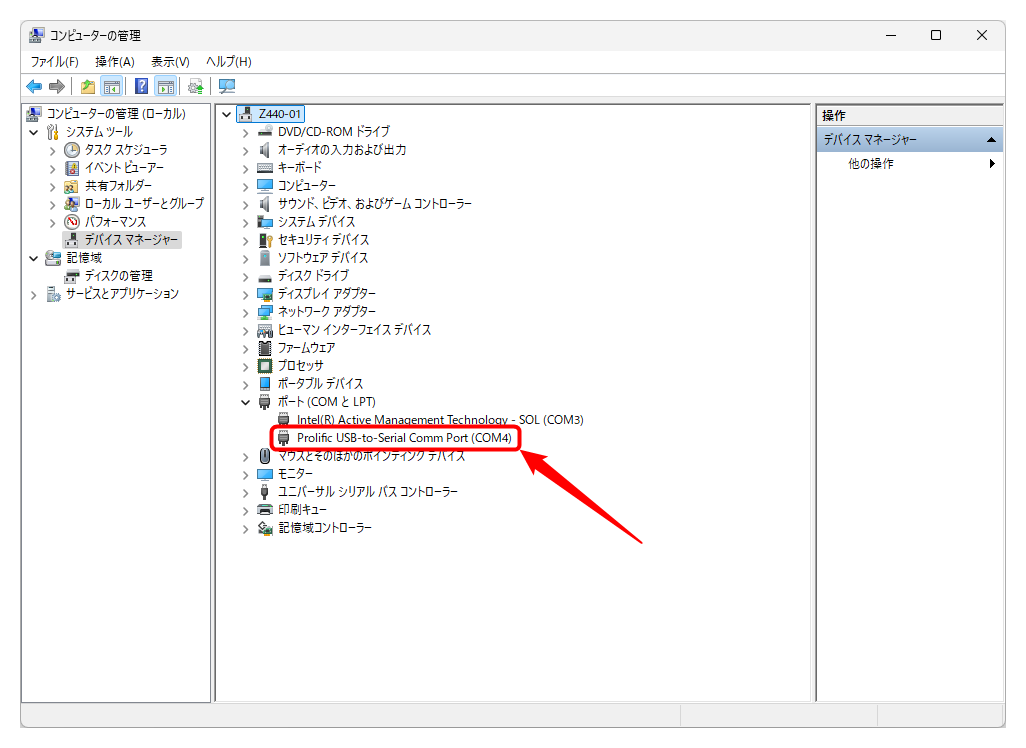
「スタートメニュー」を右クリックして「コンピューターの管理」を選択します。「コンピューターの管理」が開いたら「システムツール」>「デバイスマネージャー」をクリックします。さらに「ポート(COMとLPT)」を展開して、USB-シリアル変換ケーブルのデバイス名に表示されている「COMxx」をメモします。
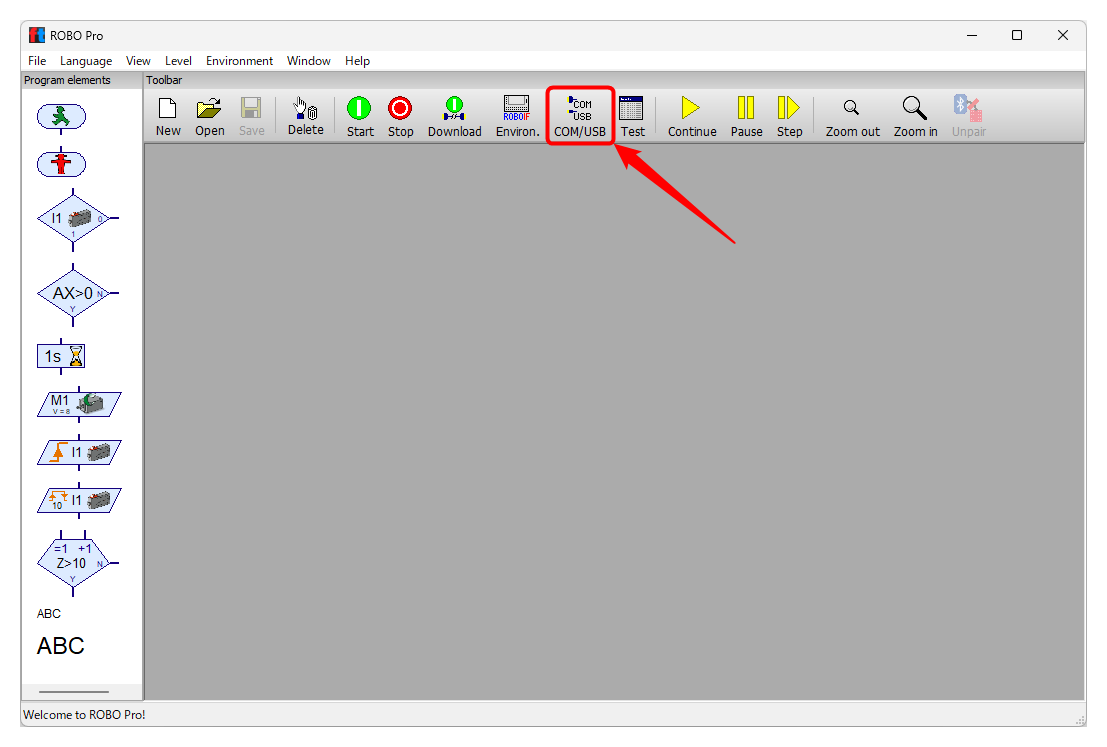
「ROBO Pro」を起動して、ツールバーの「COM/USB」をクリックします。
先ほどメモした「COMxx」と「Intelligent Interface」にチェックをつけて「OK」をクリックします。

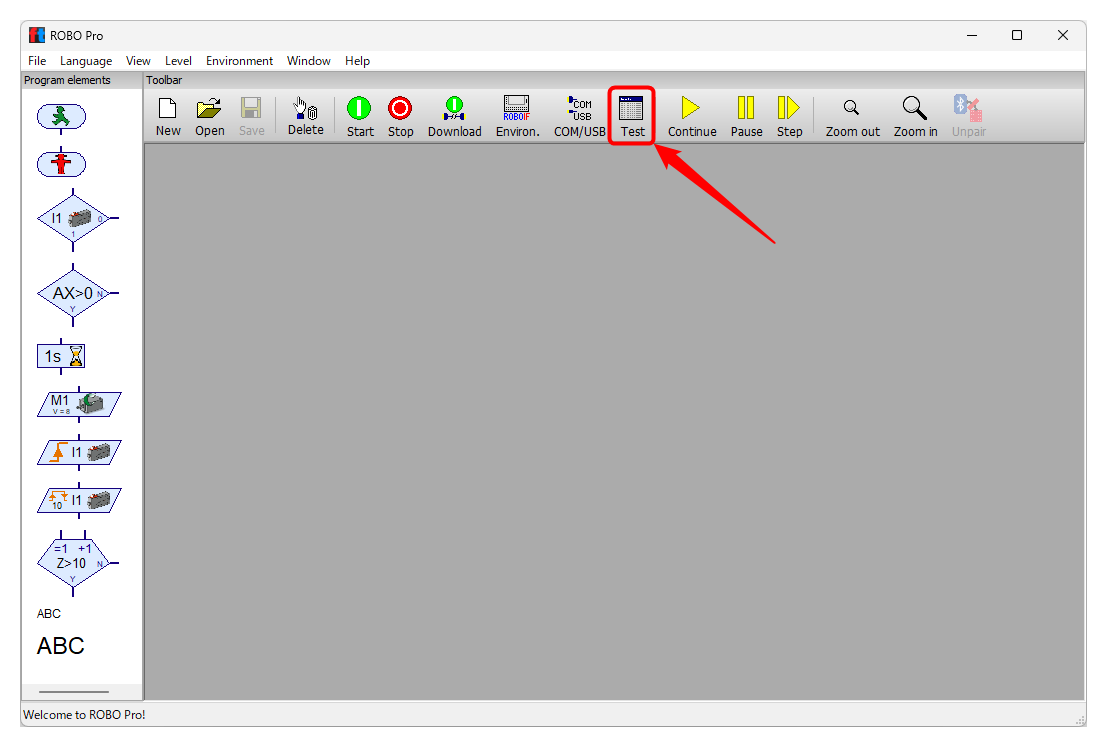
ツールバーの「Test」をクリックします。
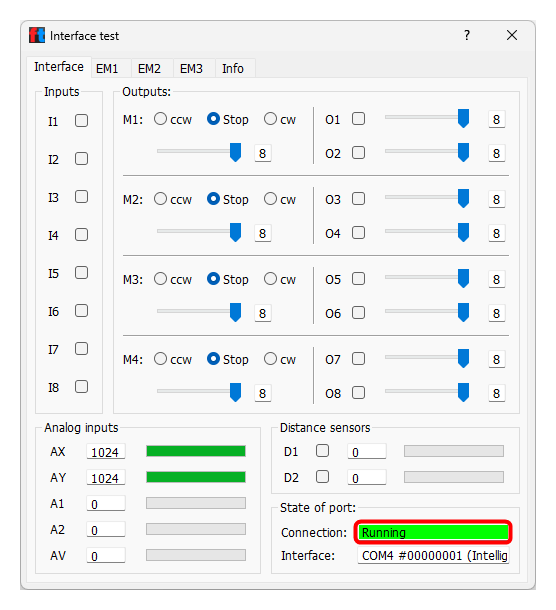
テスト画面が表示されるので、右下の「State of port」>「Connection」が「Running」であることを確認します。この画面では、出力機器(Outputs)を動作させたり、デジタル入力機器(Inputs)・アナログ入力機器(Analog inputs)の状態を確認することができます。
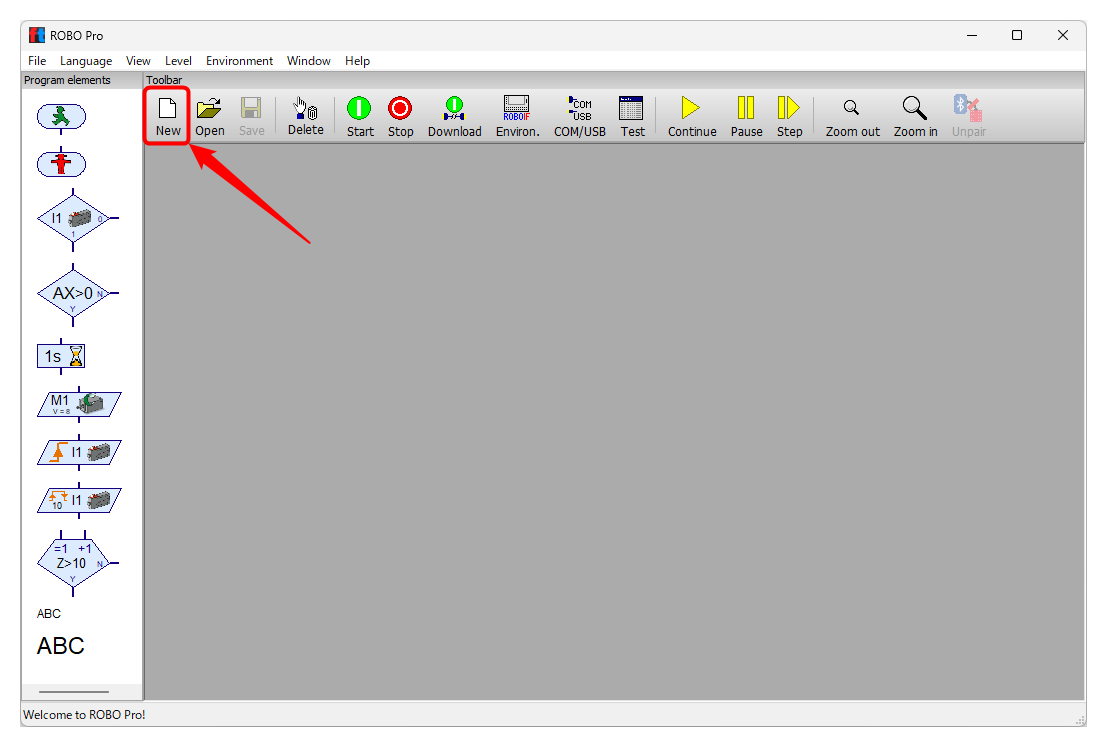
ツールバーの「New」をクリックします。
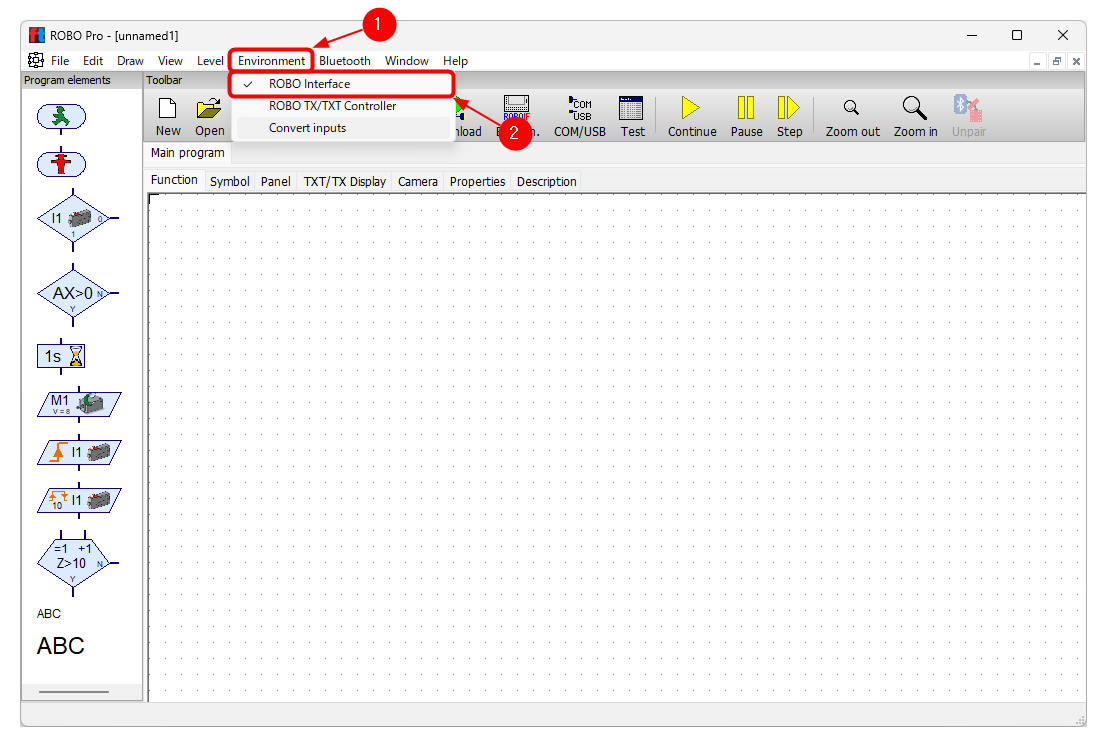
メニューバーの「Environment」をクリックして「ROBO Interface」にチェックがついていることを確認します。チェックがついていない場合は「ROBO Interface」をクリックします。
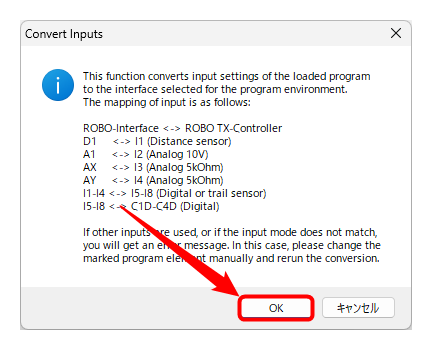
メニューバーの「Environment」>「Convert inputs」をクリックします。

「OK」をクリックします。
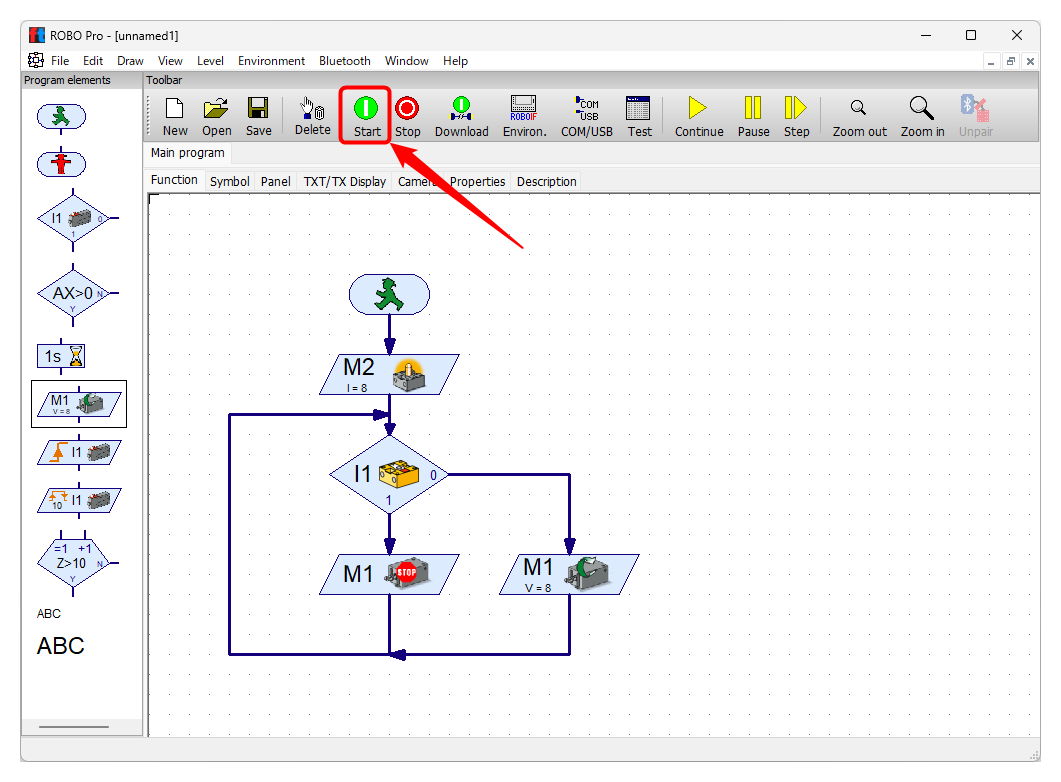
プログラミングの準備が整いました。左側のエレメントウィンドウからエレメントを選んでプログラムを作成します。できあがったプログラムは、ツールバーの「Start」をクリックすることで実行できます。これをオンラインモードといいます。
おすすめ


fischertechnik PLUSシリーズ モーターセットXS PA-27
ミニギアモーター・リバーススイッチ付き9V電池ケース・接続用減速ギア・各種接続可能ギアセット モーター仕様:9VDC 最大出力1.0W(6000rpm)【部品数】46個







