PICO ROBOTの開発環境を整える

PICO ROBOTのプログラミングに必要な専用のMicroPythonモジュール(pico_car.py)をダウンロードして、Raspberry Pi Pico内に保存する手順を紹介します。
PICO ROBOTの開発環境
PICO ROBOTは、独立した二輪の駆動輪を持つSTEM教育用のロボットカーです。Raspberry Pi Picoを搭載することで、プログラミング言語であるMicroPythonを使って、駆動輪などを制御することができます。PICO ROBOTの組み立ては「PICO ROBOTの機能と組み立て」をご覧ください。

プログラミング環境の事前準備
PICO ROBOTのプログラミング環境として、Python IDE(統合開発環境)であるThonnyを使用します。以下の1~5に沿って、事前にプログラミング環境を準備してください。

PICO ROBOTの開発環境を整える
PICO ROBOTでは、プログラミングに必要な専用のMicroPythonモジュールが提供されています。このモジュールを使うことで、PICO ROBOTに搭載されている駆動輪や各種センサーをMicroPythonスクリプト(プログラム)から制御できます。本記事では、MicroPythonモジュールをGitHubからダウンロードして、Raspberry Pi Pico内に保存する手順を紹介します。
MicroPythonモジュールのダウンロード
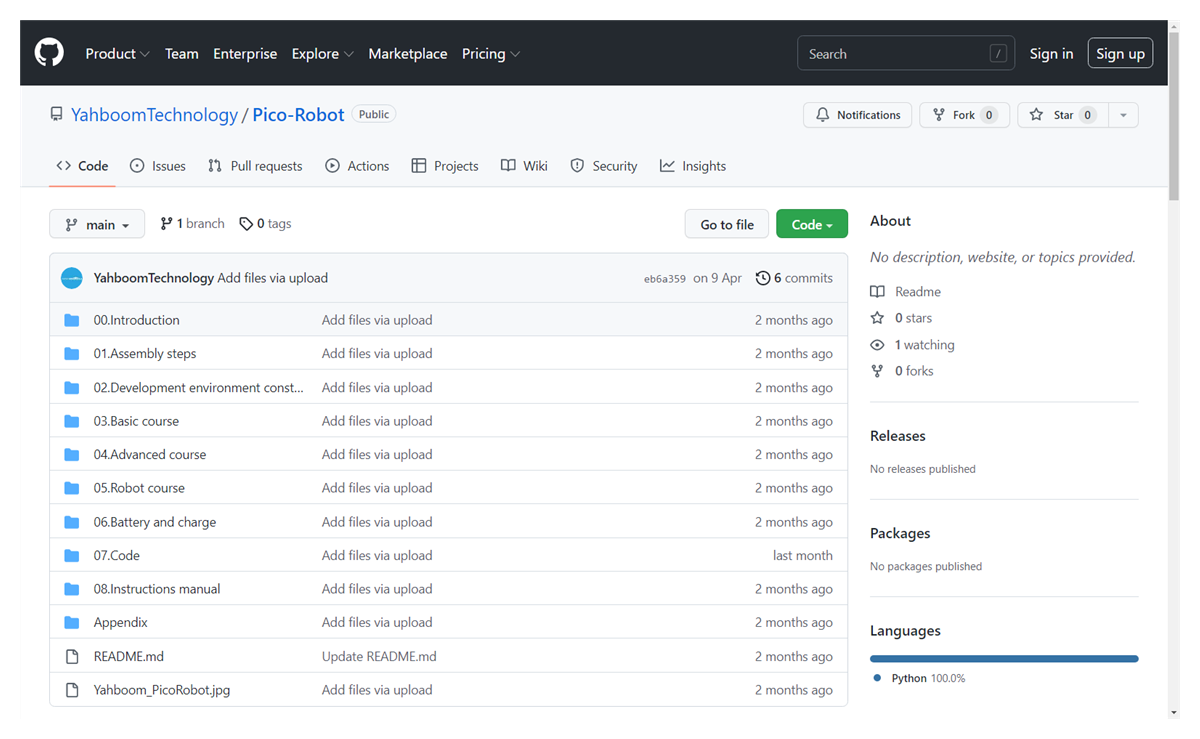
GitHubの「YahboomTechnology/Pico-Robot」にアクセスします。
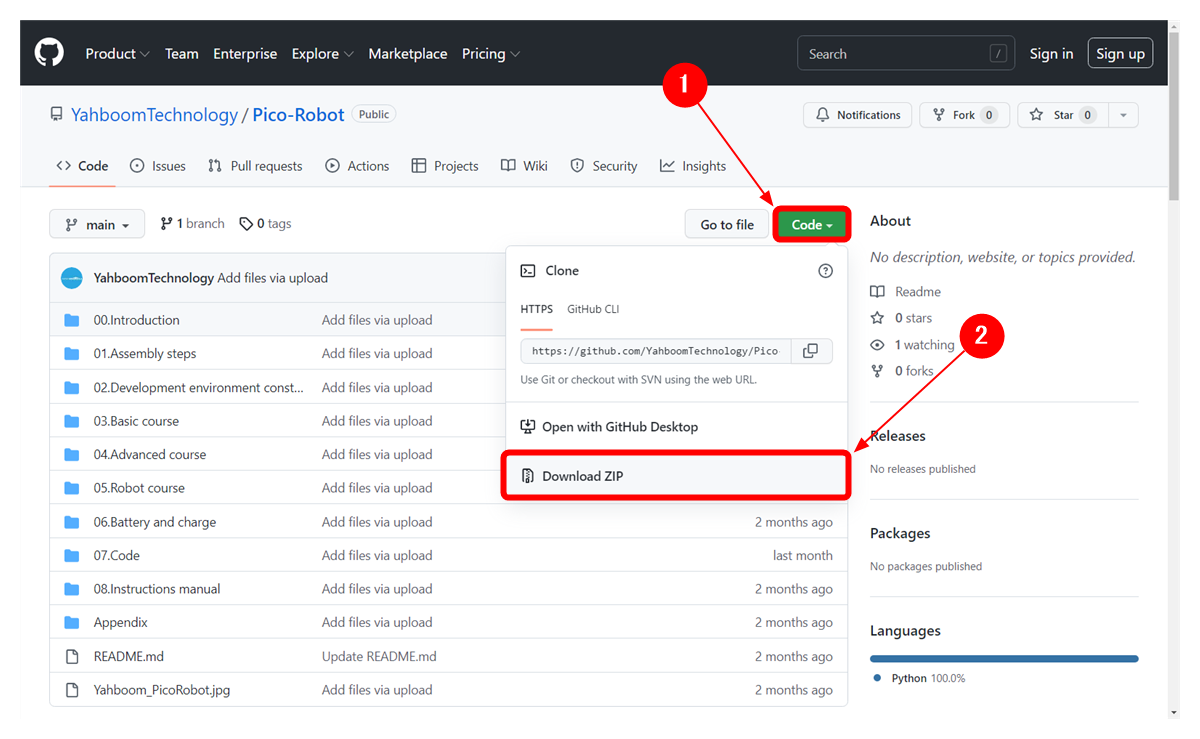
「Code」>「Download ZIP」の順にクリックして、ファイルをダウンロードします。
ダウンロードフォルダー内にファイル(Pico-Robot-main.zip)がダウンロードされたことを確認します。必要に応じて、このファイルを別のフォルダーへ移動してください。本記事では、デスクトップに移動して以下の手順をすすめます。
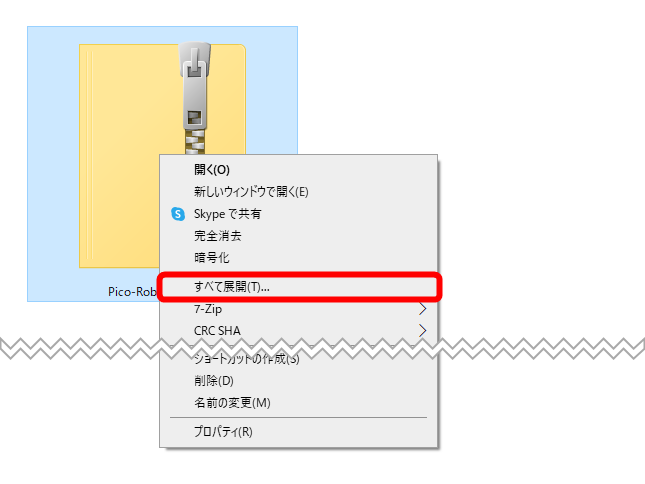
デスクトップに移動したファイル(Pico-Robot-main.zip)を右クリックして、メニューから「すべて展開...」を選択して展開します。
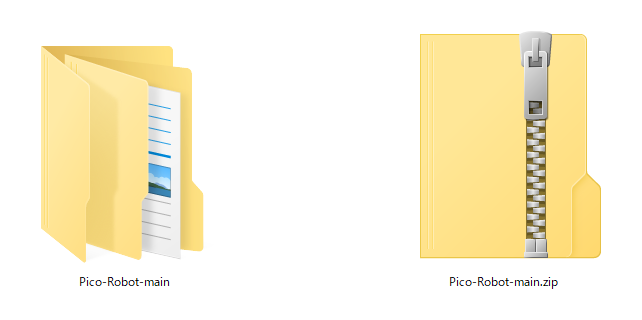
ダウンロードしたファイルとは別にフォルダー(Pico-Robot-main)がデスクトップに作成されたことを確認します。このフォルダーには、プログラミングに必要なMicroPythonモジュールの他に、チュートリアルなどのドキュメントが含まれています。
MicroPythonモジュールをRaspberry Pi Pico内に保存する
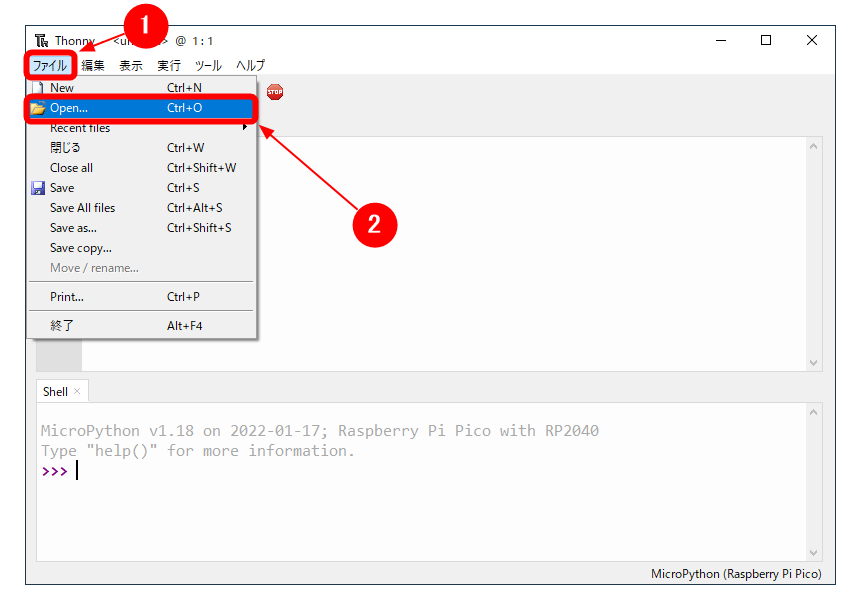
Thonnyを起動して、メニューから「ファイル」>「Open...」の順にクリックします。
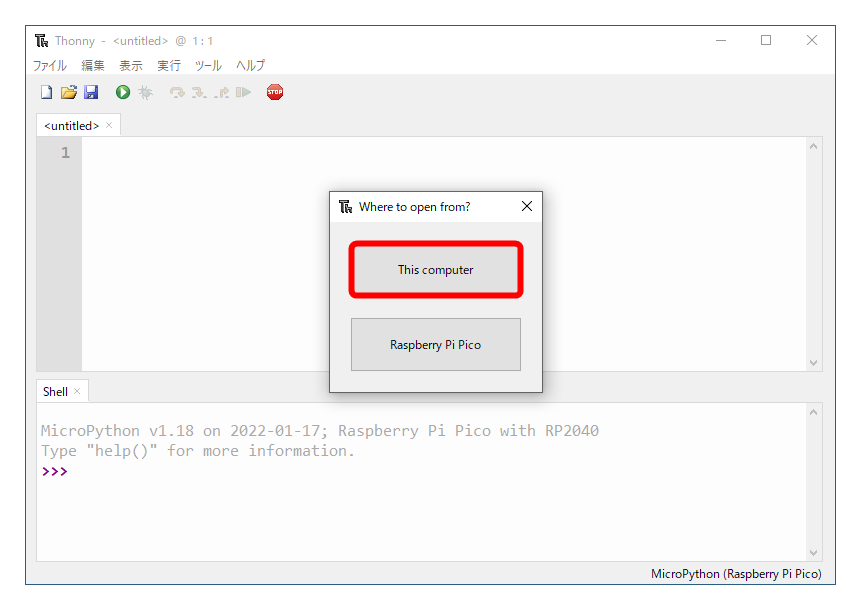
ファイルの読み込み場所を選択します。デスクトップにあるファイルを読み込むので「This computer」をクリックします。
「デスクトップ」>「Pico-Robot-main」>「Pico-Robot-main」>「Appendix」>「Library」の中にあるファイル(pico_car.py)を開きます。
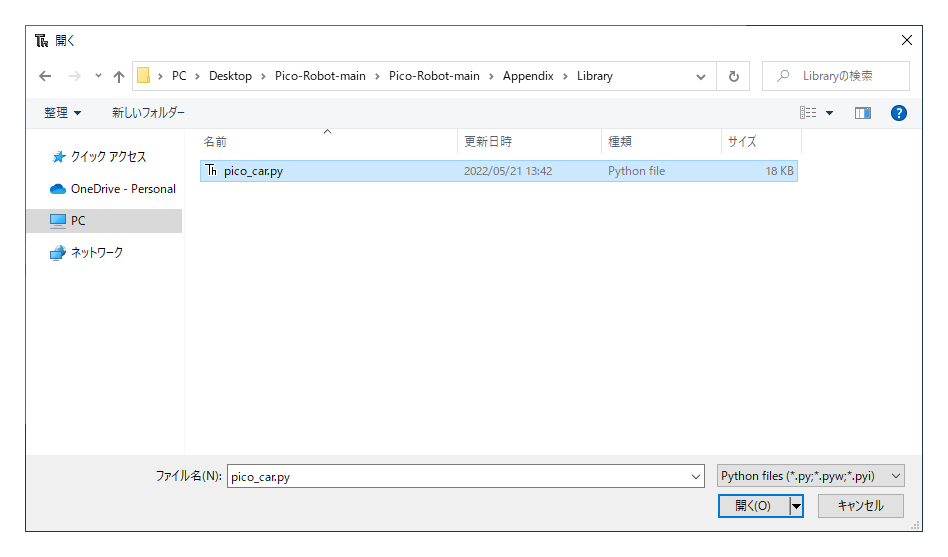
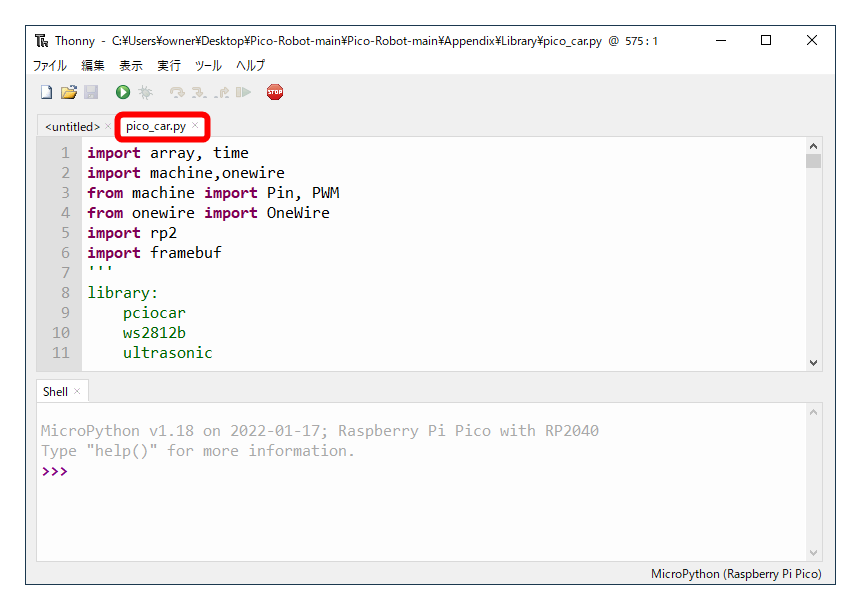
ファイル名が「pico_car.py」であることを確認します。
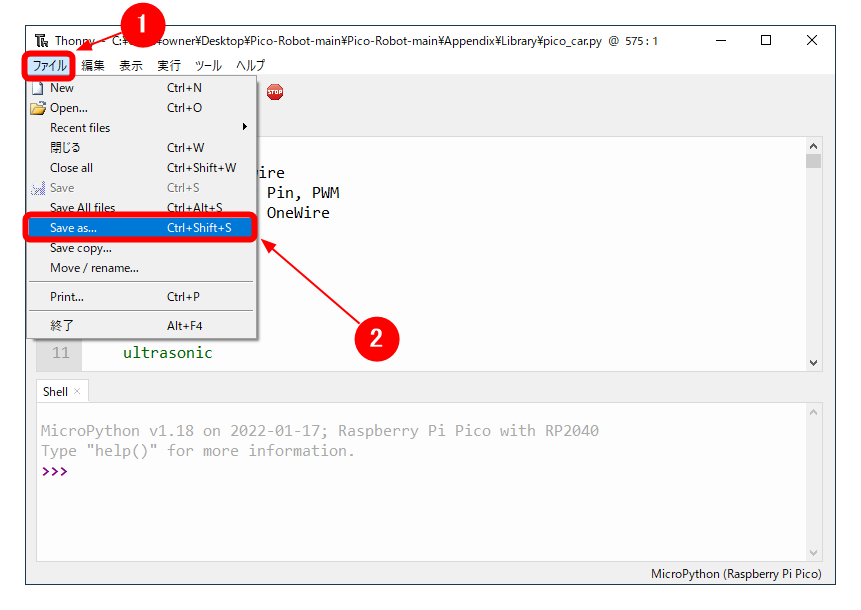
メニューから「ファイル」>「Save as...」の順にクリックします。
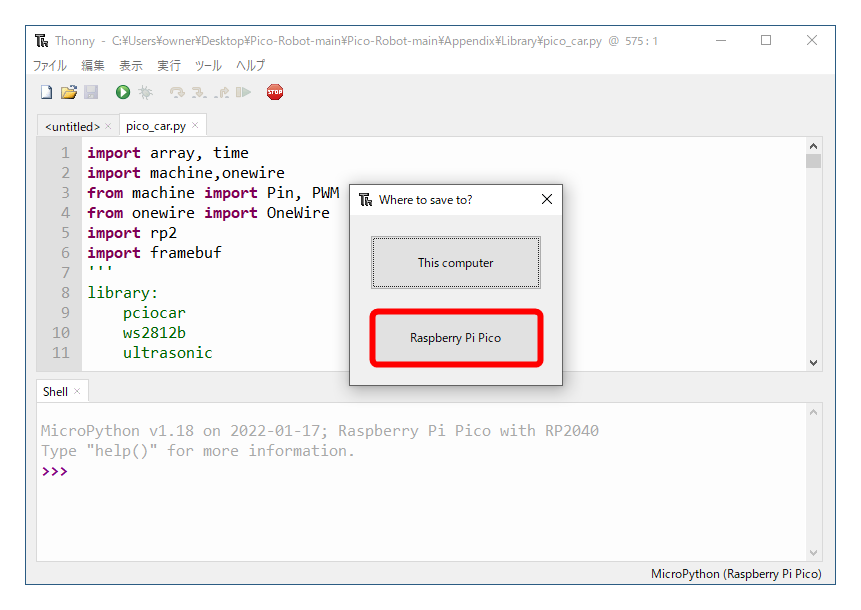
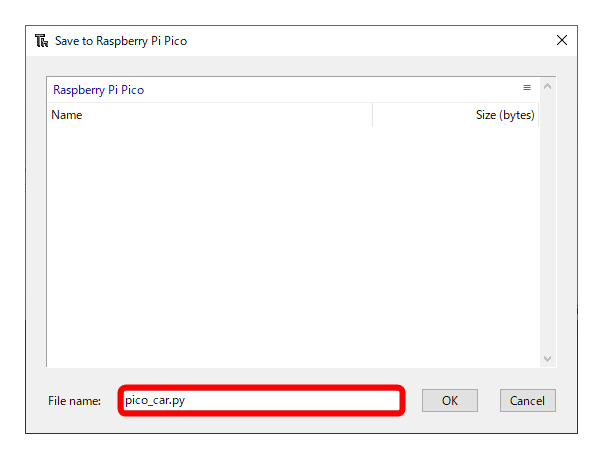
ファイルの保存場所を選択します。Raspberry Pi Pico内に保存するので「Raspberry Pi Pico」をクリックします。
ファイル名に「pico_car.py」を入力して保存します。
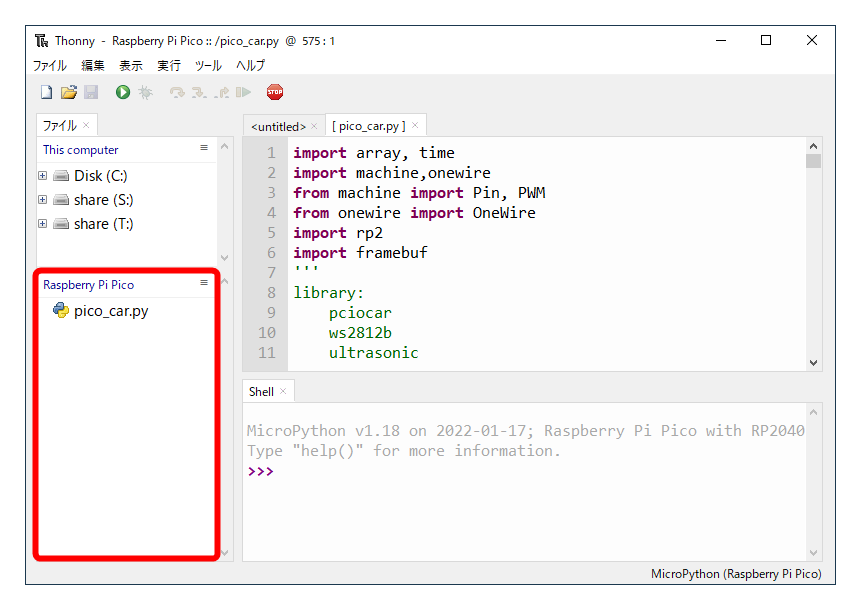
ファイルが保存されたことを確認します。
おすすめ