展開図のダウンロードと印刷
2個のサーボモーターを使用して、ボール紙で二軸のロボットアームを作ります。この記事では、展開図のダウンロードと印刷について解説します。
紙工作ロボットアーム製作の工程(目次)
- 準備するもの
- 展開図のダウンロードと印刷・・・いま読んでいる記事
- ロボットアーム(中)を作る
- ロボットアーム(先)を作る
- ロボットアーム(元)を作る
- 組み立てる
展開図のダウンロード
次のリンクから、展開図のPDFファイルをダウンロードします。
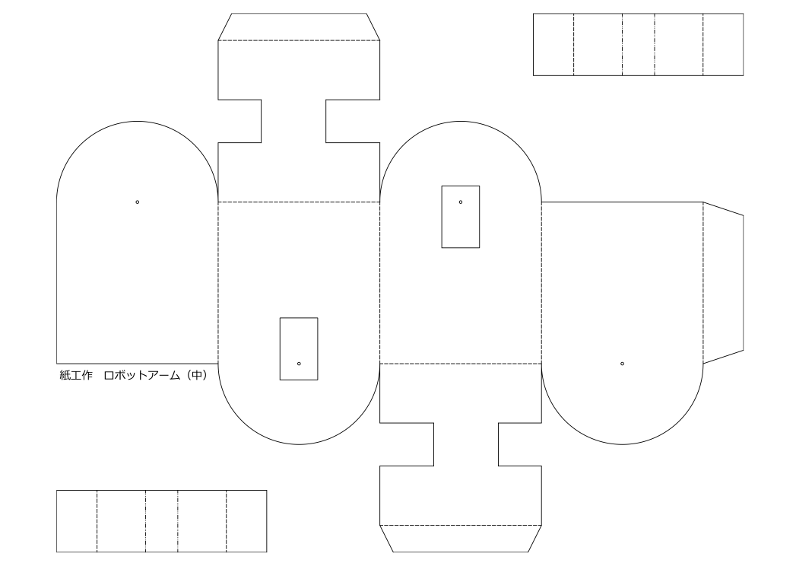
ロボットアーム(中)
2個のサーボモーターを内蔵するロボットアームの要となる部分です。
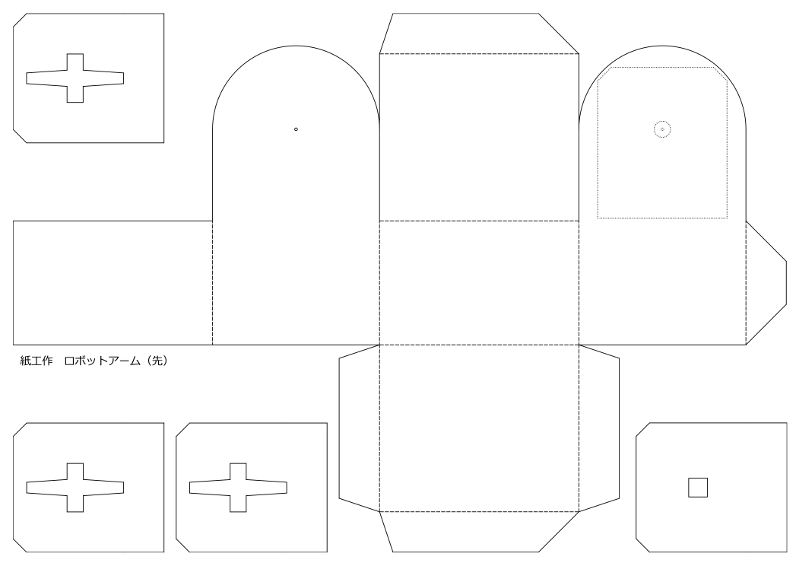
ロボットアーム(先)
サーボホーンとカシメ(凸)を取り付けるロボットアームの先端です。
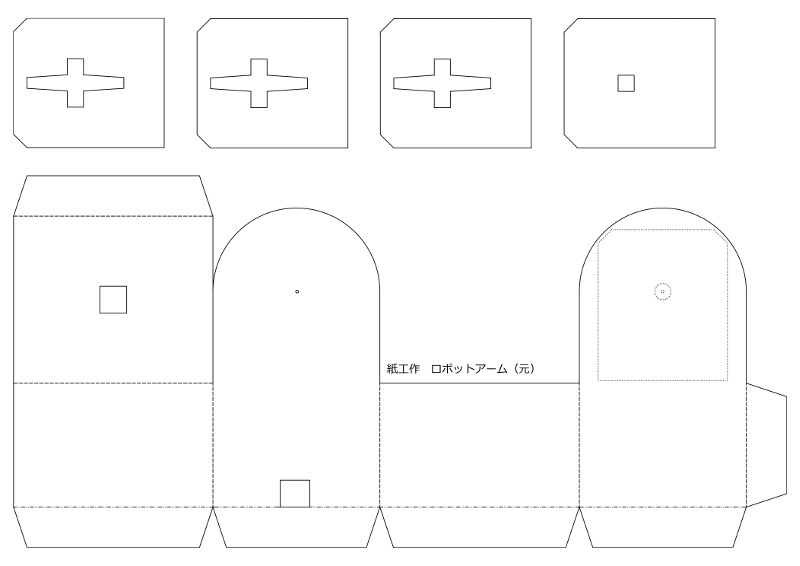
ロボットアーム(元)
サーボホーンとカシメ(凸)を取り付けるロボットアームの根元です。サーボモーターのケーブルを通す穴が開いています。
台座
ロボットアームを立てるための台座です。

展開図の印刷
ダウンロードしたPDFファイルを、A4のボール紙に印刷します。ボール紙は4枚必要です。用意するボール紙は「(1)準備するもの」を参考にしてください。
印刷時の注意点(印刷面)
展開図を印刷した面が裏側(筐体の内側)になります。ボール紙の裏面に印刷してください。
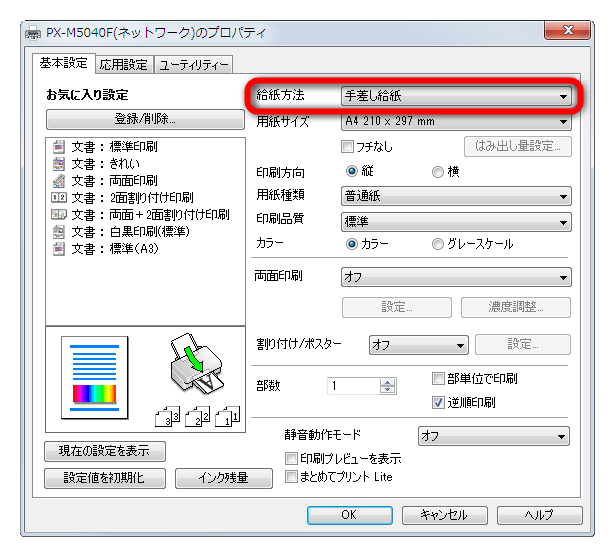
印刷時の注意点(手差し印刷)
使用するボール紙は、0.5mm~0.6mmの厚さがあるため、多くのプリンターでは手差し印刷となります。印刷時、プリンターのプロパティーで「給紙方法」の設定を「手差し給紙」にしてください。図4-1-2-5は、手差し印刷の設定例です。
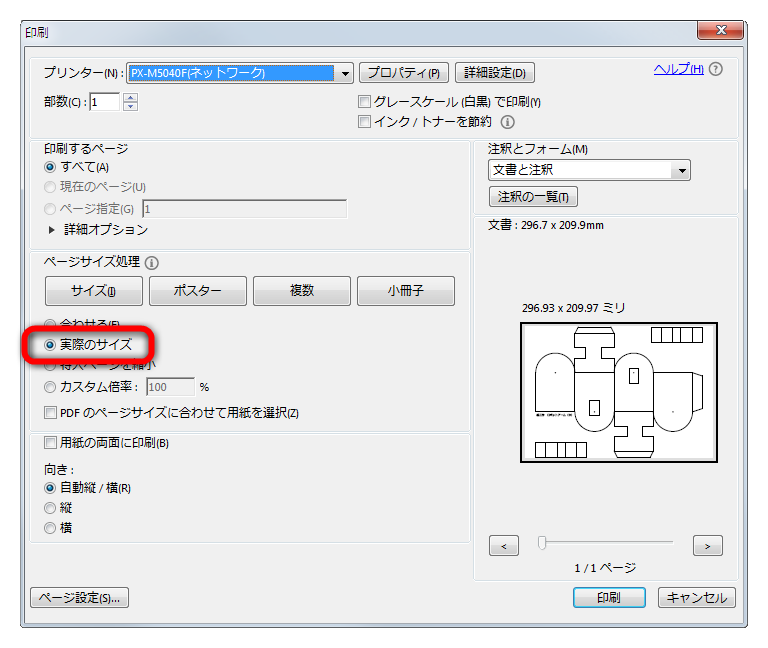
倍率は、「実際のサイズ」または「100%」を設定してください。
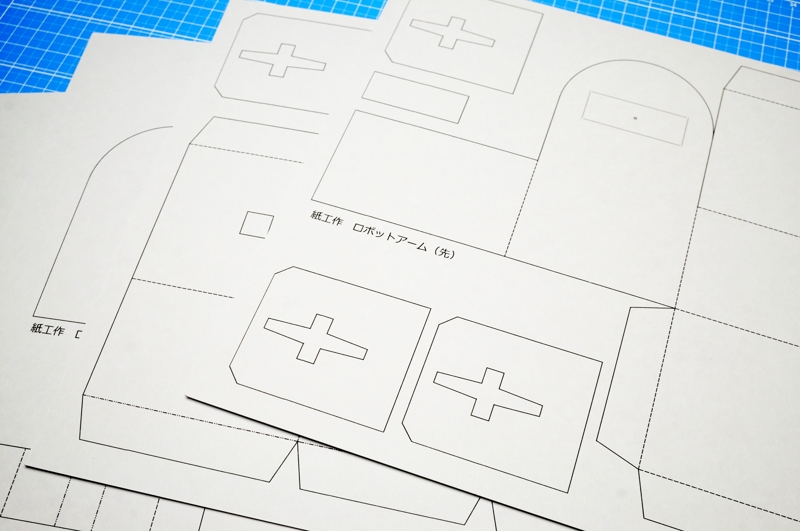
印刷された展開図
図4-1-2-7は、ボール紙に印刷された展開図のようすです。
micro:bit Lab.【マイクロビット】
micro:bit Lab.では、micro:bit【マイクロビット】に関する情報を紹介しています。



【v2対応】micro:bitであそぼう! たのしい電子工作&プログラミング


micro:bitではじめるプログラミング 第3版 ―親子で学べるプログラミングとエレクトロニクス (Make: KIDS)
ビジュアル図解 micro:bitではじめるプログラミング&マイコンボード入門




Labsの一覧
閲覧中の記事タイトル
micro:bit【マイクロビット】紙工作ロボットアーム - (2)展開図のダウンロードと印刷 | micro:bit Lab.【マイクロビット】
この記事を書いた人
泉保宗也(せんぼむねや)。香川県在住。1969年生まれ。有限会社サヌキドットコム代表。
SNSによる情報発信
このサイトについて
サヌキテックネットは、「ものづくり:make」を楽しみながら学ぶ人へ向けた独習サポートサイトです。対象は、これから「ものづくり人:maker」を目指す人。自分が「悩んで調べたこと」を書いていけば、きっと誰かの参考になるはずという想いのもと、記事を配信しています。「知識と経験を以て、知恵と成す」
このサイトのブログシステム(CMS)
サヌキテックネットは、有限会社サヌキドットコム(香川県)のブログシステム(CMS)を使用しています。
姉妹サイトの紹介
カガウェブ[KAGAWA WEB]は、ちょっぴりディープに香川県の魅力を発信するローカルWEBマガジンです。
ご意見・お問い合わせ
サヌキテックネットをご利用頂きありがとうございます。当サイトへのご意見・ご要望をお聞かせください。
個人情報の取り扱い
サヌキテックネットの個人情報の取り扱いについては、個人情報保護に関する取り組みをご覧ください。
記事の正確性
記事の正確性には努めていますが、掲載内容に誤りがありましたら、ご指摘頂ければ幸いです。
SSL(HTTPS)
このサイトは、安全な通信を行うために常時SSL(HTTPS)化しています。
