Raspbot AI Vision Robot Carを組み立てる(1)

Raspbot AI Vision Robot Carは、独立した4つの駆動輪と二軸の高解像度カメラを搭載したAI学習用のプログラミングロボットカーです。本記事は、組み立て手順の第一弾として「駆動輪の組み立てと取り付け」を紹介します。
Raspbot AI Vision Robot Carとは
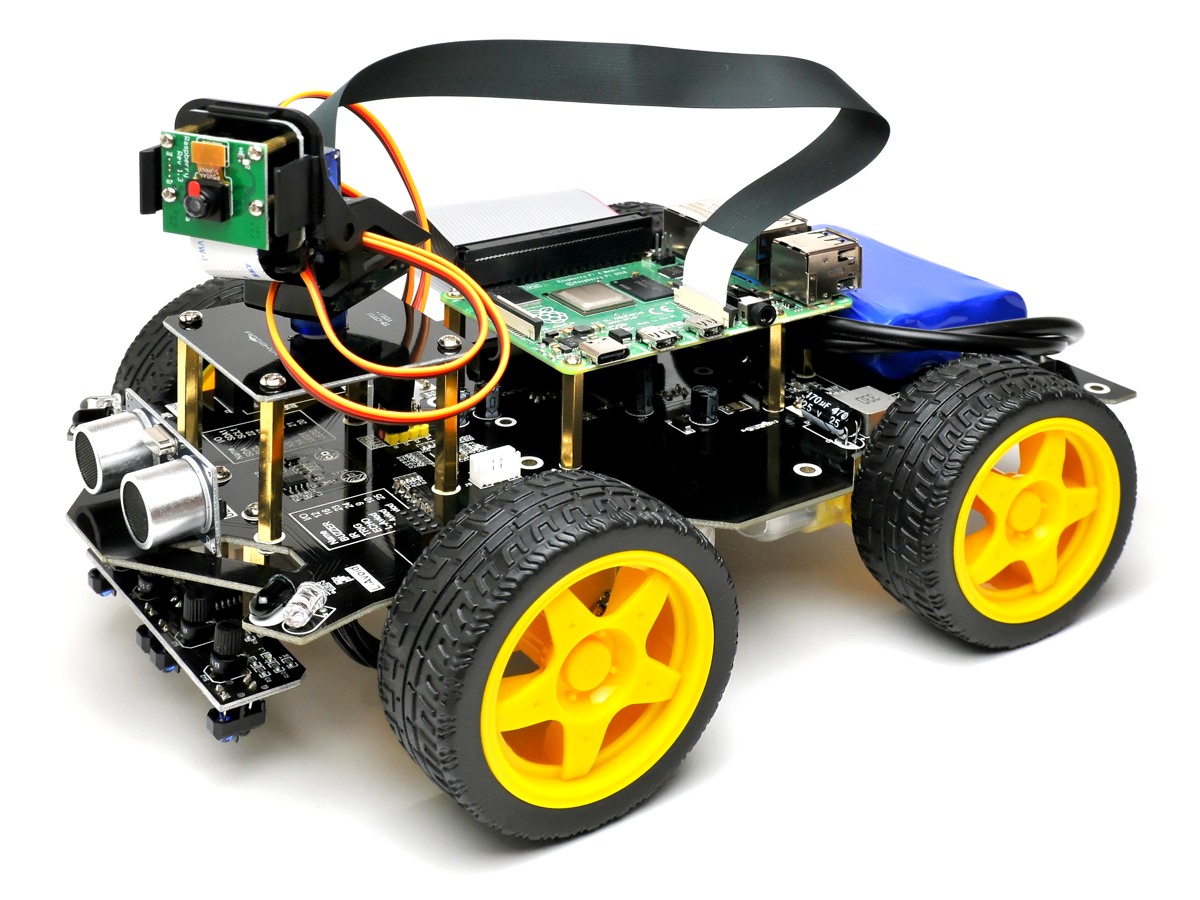
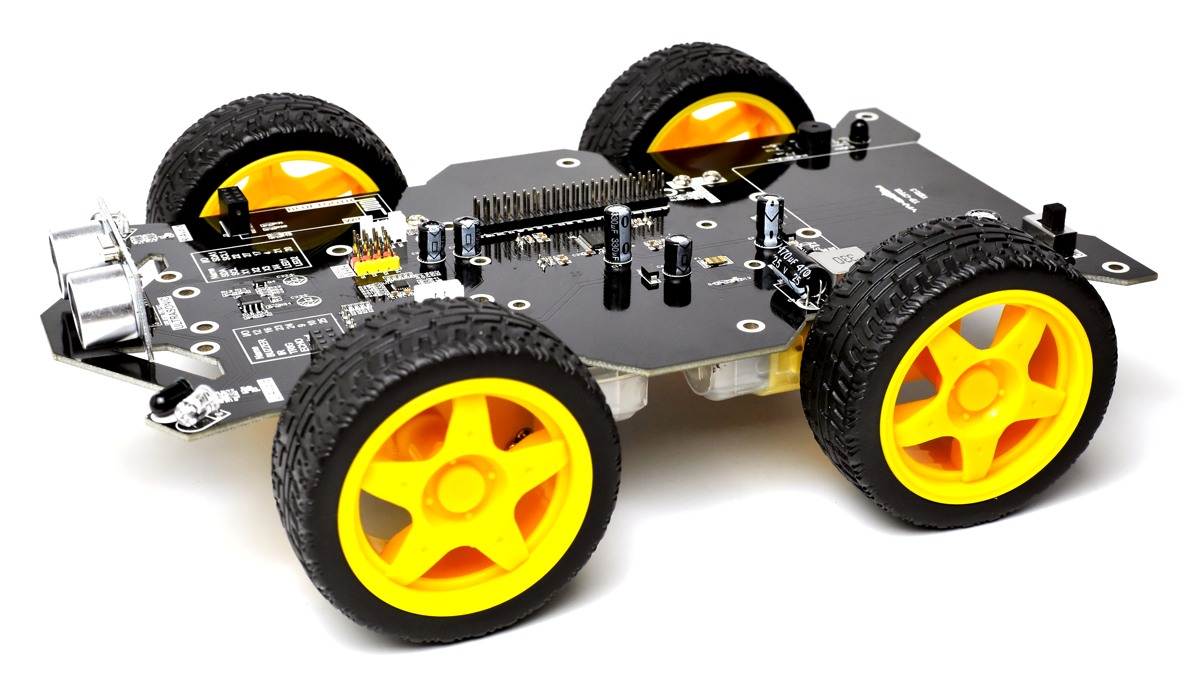
Raspbot AI Vision Robot Car
Yahboom(中国名:亚博)のRaspbot AI Vision Robot Carは、独立した4つの駆動輪と二軸の高解像度カメラを搭載したAI学習用のプログラミングロボットカーです。制御用のコンピューターとして、Raspberry Pi 4を採用しています。本体のサイズは、長さ240mm・幅158mm・高さ150mm(カメラ含む)、タイヤの直径は67mmです。
シャーシとなる基板上には、超音波距離センサー・赤外線障害物検知センサー・ライントラッキングセンサーや、IIC・シリアル・サーボインターフェースなどの拡張ポートがあり、Raspberry Pi 4のGPIOヘッダーとリボンケーブルで接続されています。GPIOを経由することで、Raspberry Pi OS上のさまざまな言語・開発環境から駆動輪・カメラ・センサーなどを制御することができます。これらの制御方法はチュートリアルで詳しく解説されています。
Raspbot AI Vision Robot Carを組み立てる(1)
本記事は、組み立て手順の第一弾として「駆動輪の組み立てと取り付け」を紹介します。
組み立てについて
Raspbot AI Vision Robot Carは、組み立てキットです。イラスト付きの組み立てマニュアルが付属していますが、チュートリアルで公開されている動画のほうが、より詳しいのでおすすめです。動画の組み立て時間は約20分です。

ネジ類も多く入っているのですが、種類毎に小分けされ、袋に番号が振られているので探しやすくなっています。都度、必要なものだけを取り出して使います。

紛失しないように、ネジ類などの小物を入れておく、小皿を用意しておくといいでしょう。

駆動輪の組み立て
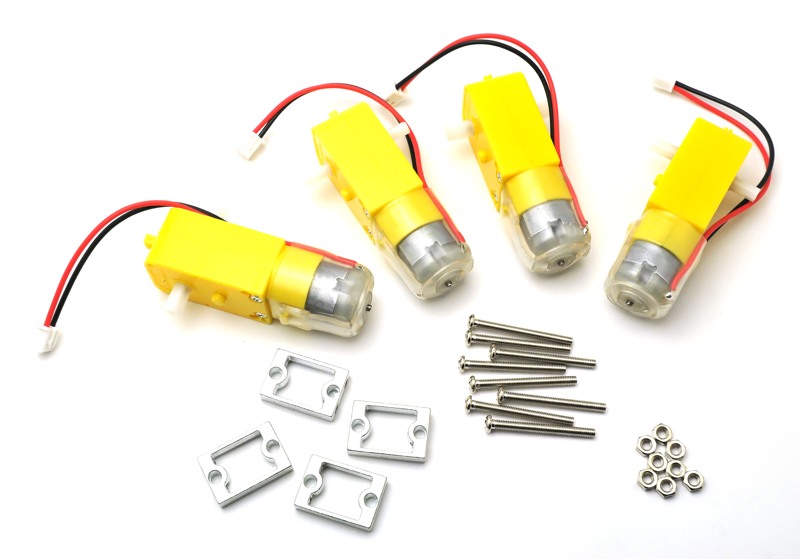
モーター(4個)・固定用金具(4個)・M3×30mmネジ(8個)・M3ナット(8個)を用意します。ネジ・ナットは2番の袋に入っています。このモーターは、ギヤ比48:1のギヤを内蔵したギヤードモーターで、定格電圧は6Vです。
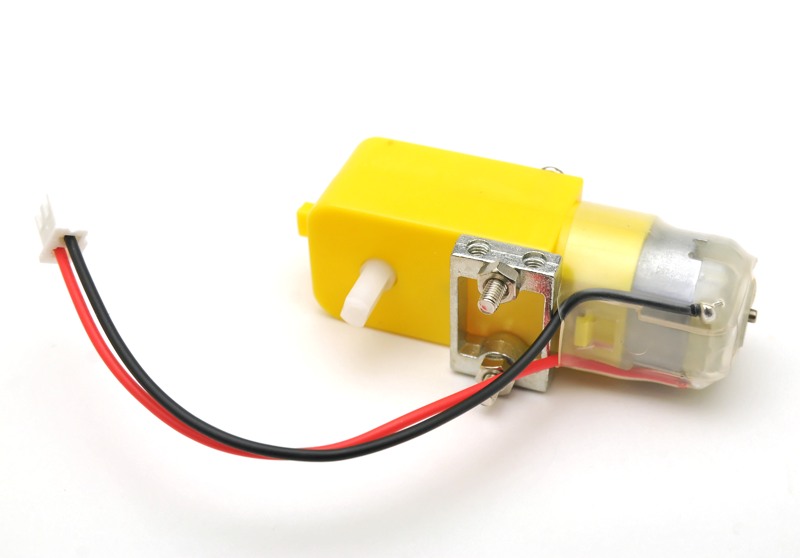
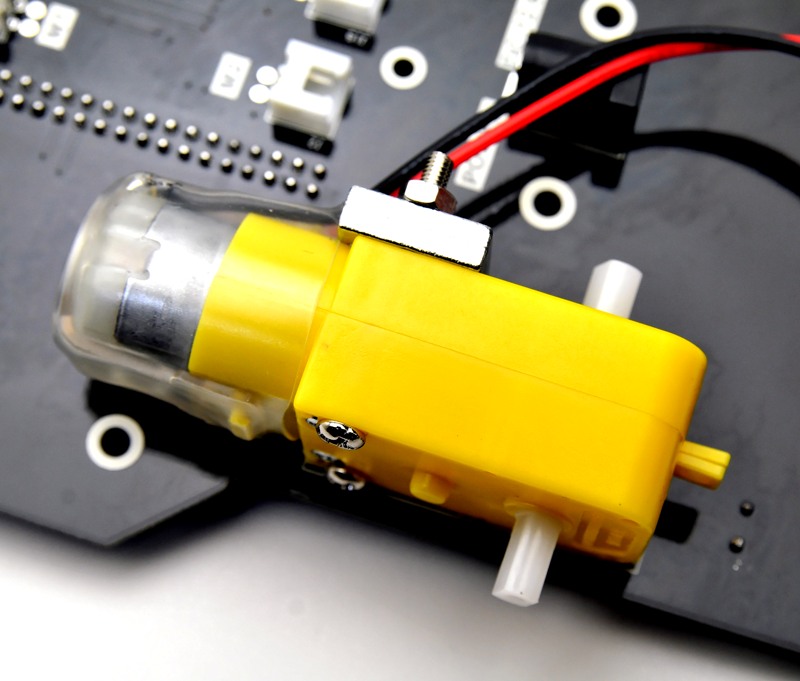
固定用金具には、モーターへ取り付けるためのネジ穴と、シャーシへ固定するためのネジ穴(写真上部)があります。シャーシへ固定するためのネジ穴の向きを間違えないように、固定用金具をモーターのリード線側に取り付けます。
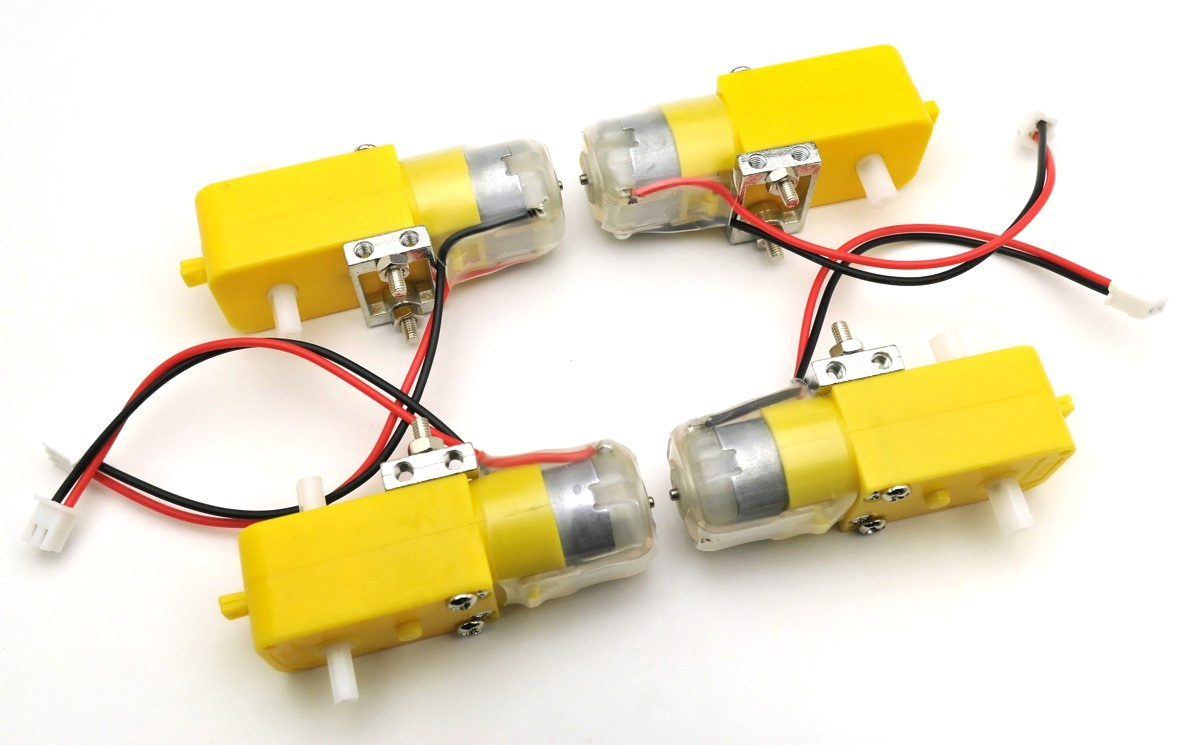
同じ手順で、すべてのモーターに固定用金具を取り付けます。シャーシへ固定するためのネジ穴の向きは、図2-5を参照してください。向きは2種類あります。
モーターの固定
M3×6mmのネジ(8個)を用意します。ネジは1番の袋に入っています。

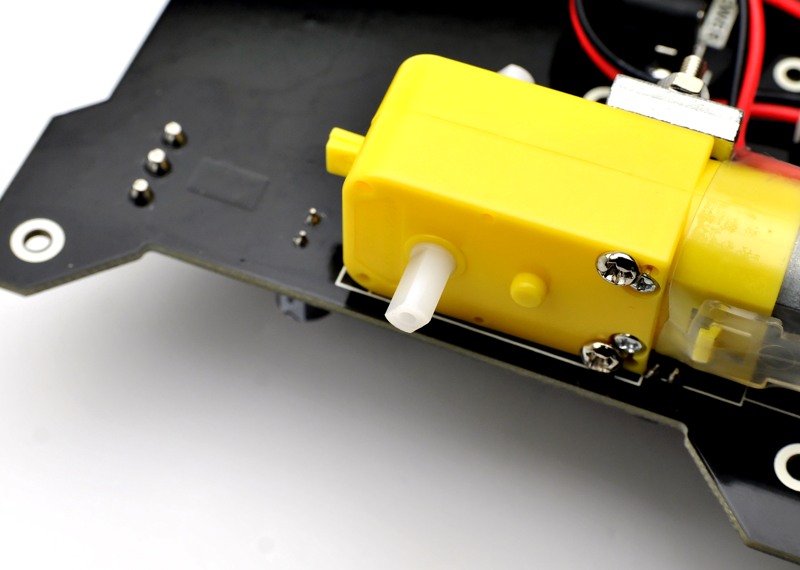
まず、モーターを固定する位置を確認します。シャーシ上にモーターの位置と向きを示す図(4個所)があります。
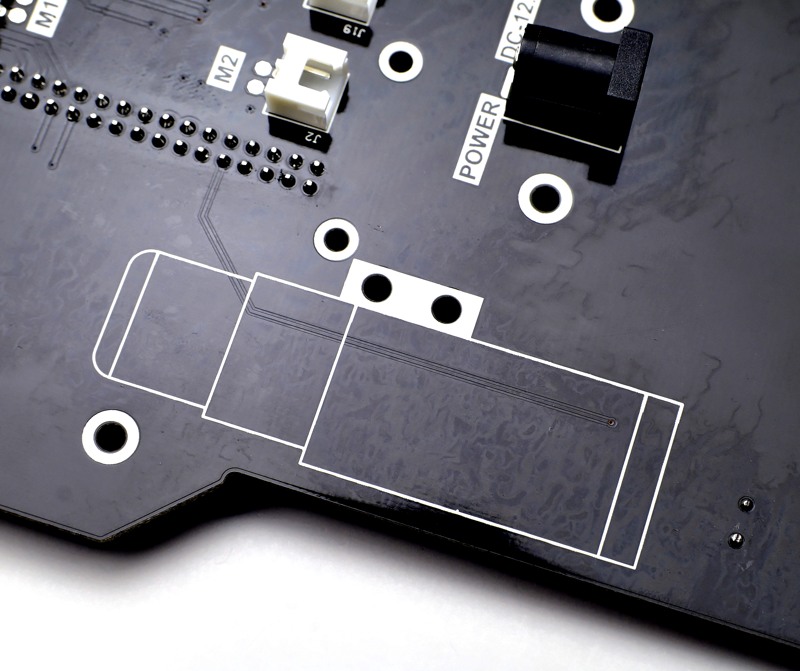
モーターのリード線が内側になるようにして、図に合わせます。
シャーシの反対側からネジで固定します。
すべてのモーターを固定します。
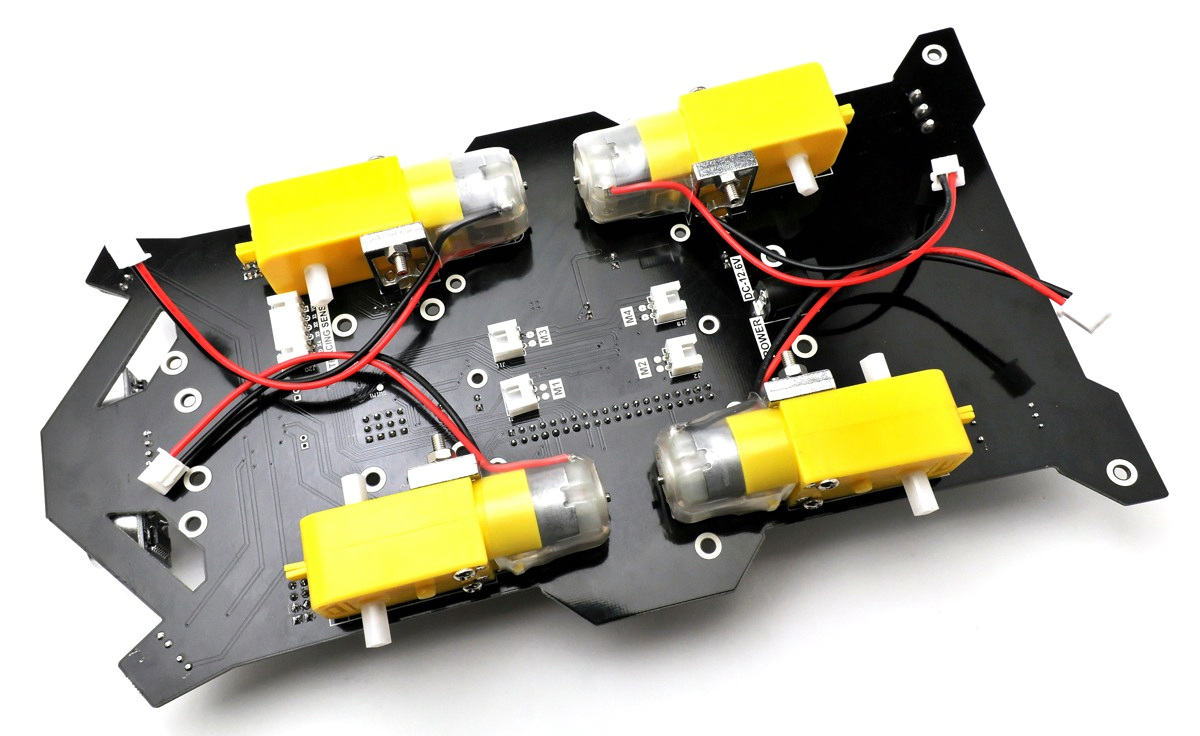
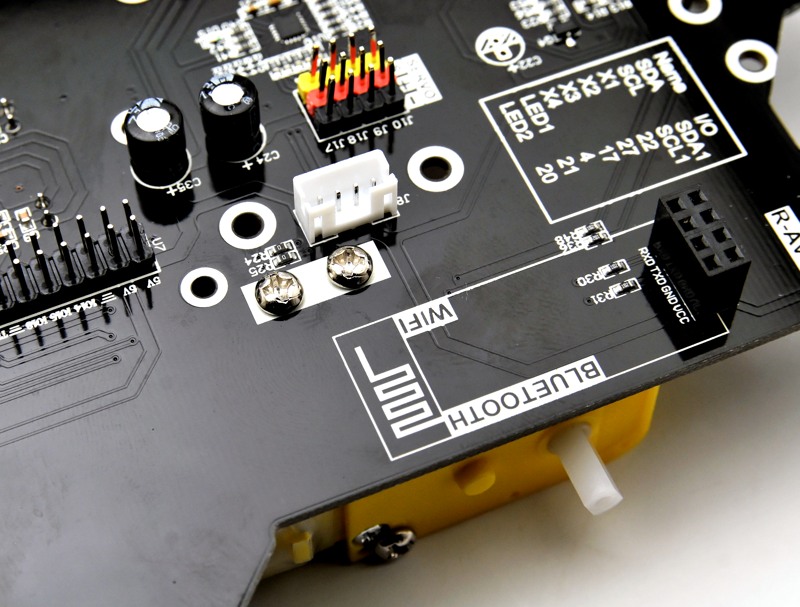
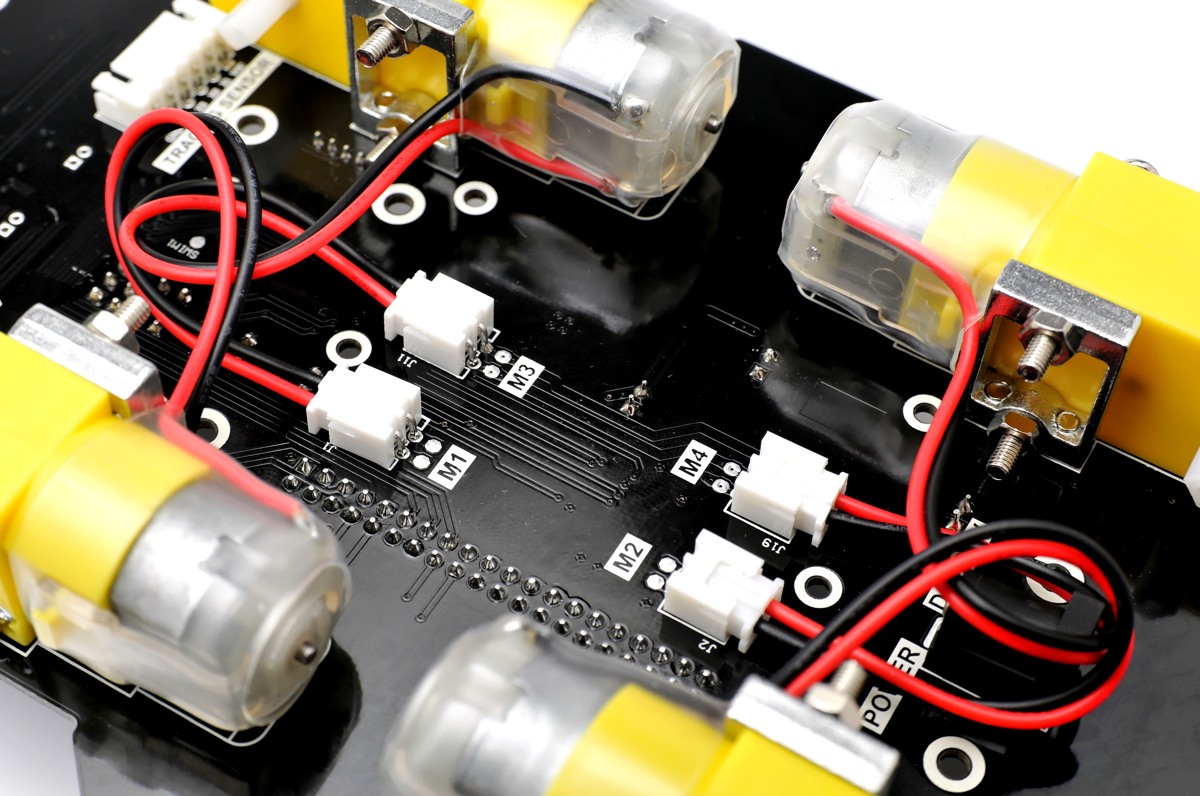
モーターのリード線を、それぞれ隣にあるモーター端子(M1~M4)へ接続します。
タイヤの取り付け
モーターの出力軸は、丸シャフトではなく、両側が平行にカットされています。
タイヤ(4個)を用意します。モーターの出力軸と、タイヤの向きを合わせて、奥まで押し込みます。この時、タイヤの取り付け面とは反対側から、指でしっかりとモーターを押さえておきましょう。

すべてのタイヤを取り付けます。

駆動輪の取り付けが完了しました。次回は、第二弾として「FPVカメラ(AIビジョンカメラ)の組み立て」を紹介します。
おすすめ

Raspberry Pi 4 ModelB 4GB 技適対応品【RS・OKdo版】
Broadcom BCM2711 Quad core Cortex-A72 (ARM v8) 64-bit SoC @ 1.5GHz(4コア)

Raspberry Pi カメラモジュール【Raspberry Pi Camera V2】
Raspberry Pi Camera V2 ラズベリーパイ用カメラモジュール。動画対応 1920×1080 (H.264 1080p@30fps、720p@60fps、640x480p@90fps)


Yahboom メカナムホイールロボットカー omni:bit
この全方向移動スマートカーは、146個のブロック、4個のビルディングブロックモーター、および4個の全方向性ホイールで構成されています。






