Raspbot AI Vision Robot Carを組み立てる(2)

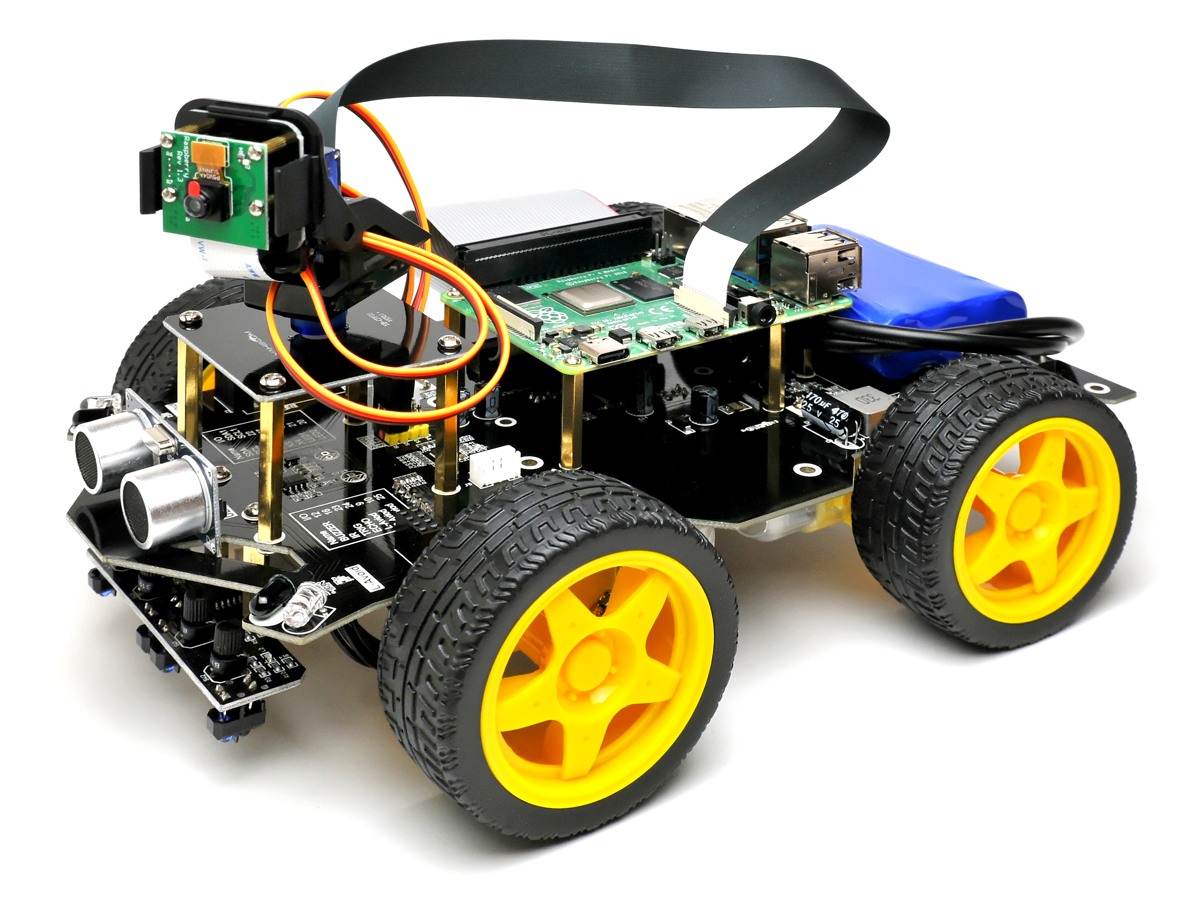
Raspbot AI Vision Robot Carは、独立した4つの駆動輪と二軸の高解像度カメラを搭載したAI学習用のプログラミングロボットカーです。本記事は、組み立て手順の第二弾として「FPVカメラ(AIビジョンカメラ)の組み立て」を紹介します。
Raspbot AI Vision Robot Carとは
Raspbot AI Vision Robot Car
Yahboom(中国名:亚博)のRaspbot AI Vision Robot Carは、独立した4つの駆動輪と二軸の高解像度カメラを搭載したAI学習用のプログラミングロボットカーです。「Raspbot AI Vision Robot Carを組み立てる(1)」で詳しく紹介しています。
Raspbot AI Vision Robot Carを組み立てる(2)
本記事は、組み立て手順の第二弾として「FPVカメラ(AIビジョンカメラ)の組み立て」を紹介します。
FPVカメラ(AIビジョンカメラ)の組み立て
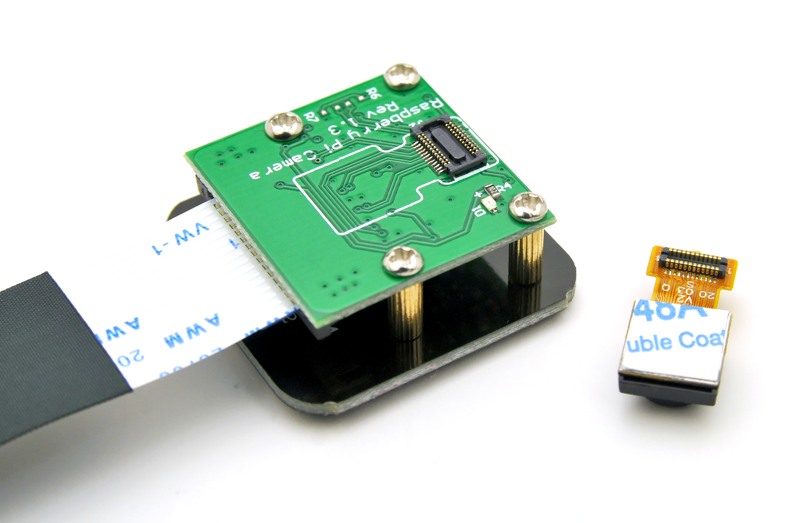
カメラモジュール(1個)・黒いケーブル(1個)・固定板(1個)・M2×7mmスペーサー(4個)・M2×4mmネジ(8個)を用意します。スペーサー・ネジは4番の袋に入っています。このカメラモジュールは、Raspberry Pi Camera v1.3で、主な仕様は500万画素・2592×1944・1080P@30FPS/720P@60FPS/480P@90FPSとなっています。

カメラモジュールに付いている白いケーブルを、長めの黒いケーブルと交換します。まず、コネクターの黒い部分を手前に引き出します。
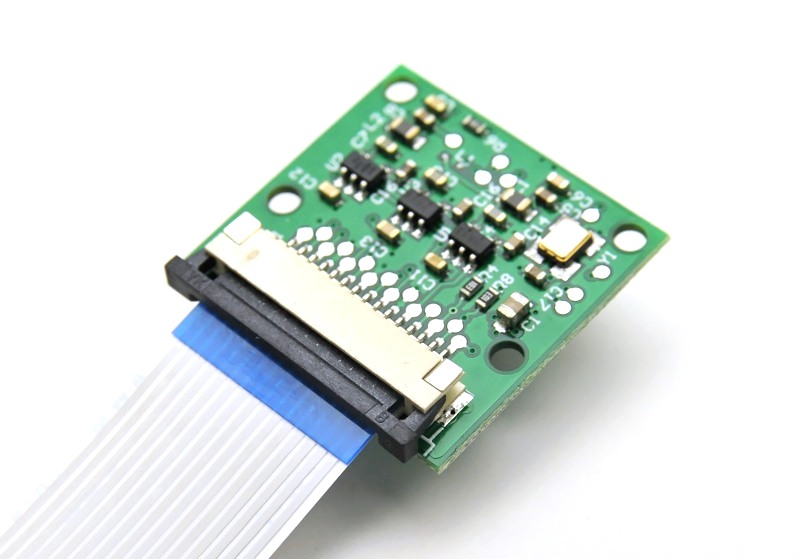
白いケーブルの固定が解除されるので、引き抜きます。

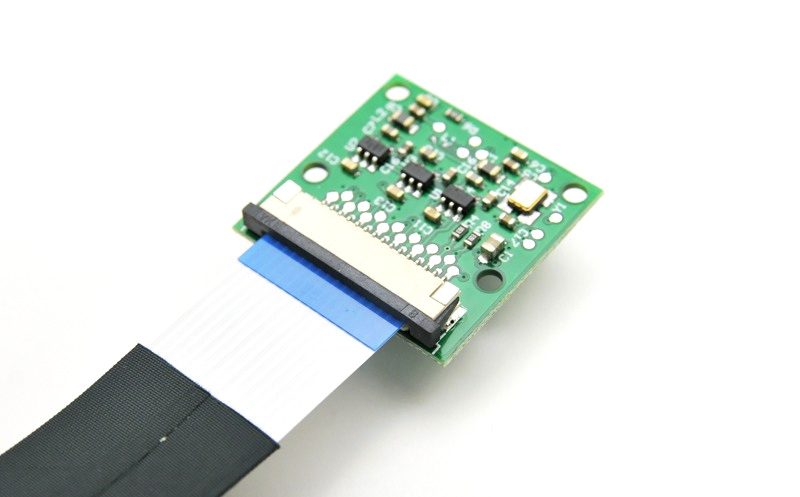
黒いケーブルを、向きに注意しながら差し込みます。コネクターの黒い部分を押し込んで、黒いケーブルを固定します。
カメラモジュールの固定版に、スペーサーをネジ止めします。

スペーサーの上にカメラモジュールをネジ止めします。カメラモジュールのレンズに貼り付けられた保護シールはそのままにしておきます。
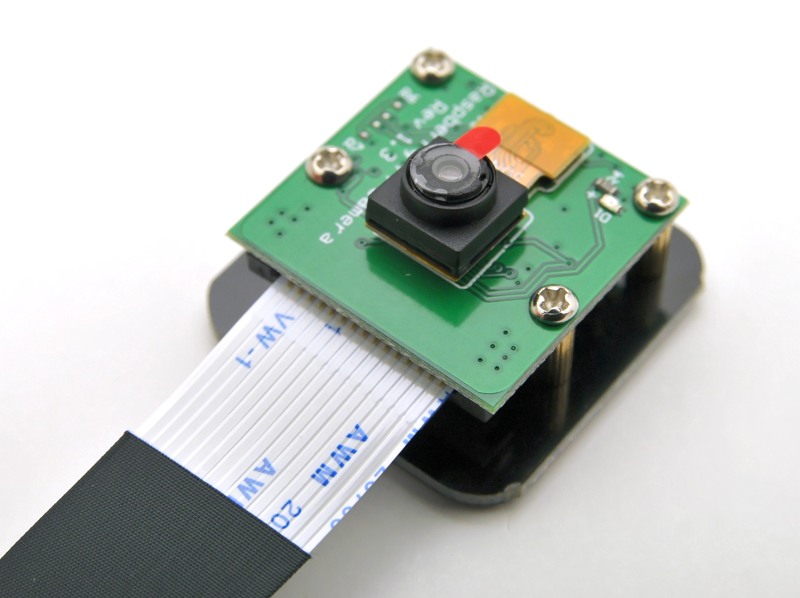
カメラが基板に固定されているかどうか確認します。図2-7は、固定されていない状態です。
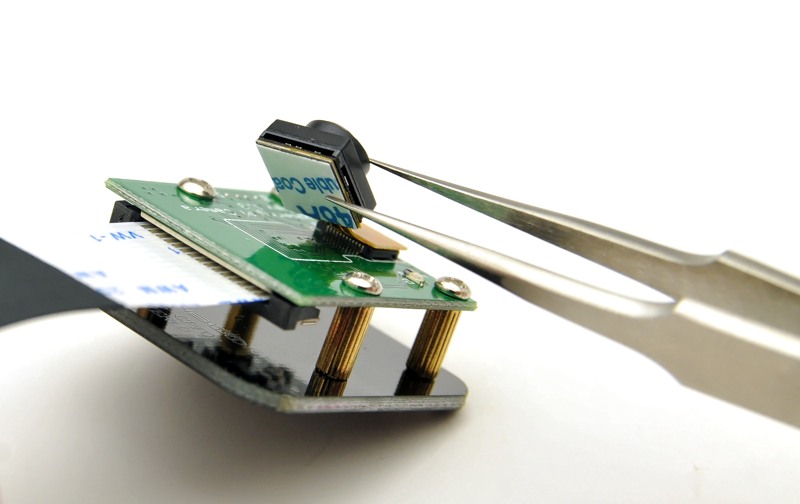
固定されていない場合は、茶色のコネクタ部分を優しく摘まみ、カメラを取り外します。カメラの背面に両面テープが貼られているので、はく離紙をはがして、元の位置へ接着します。このとき、コネクタへの差し込み、接着の順で行うとズレません。
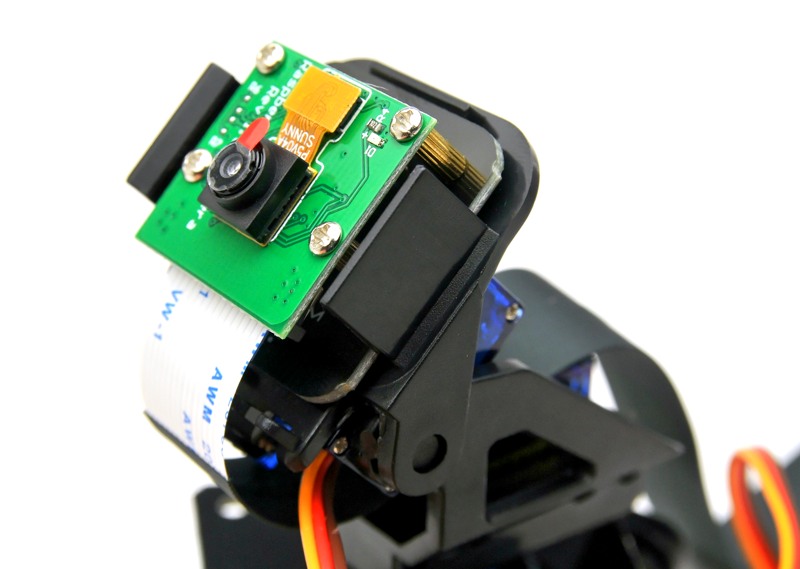
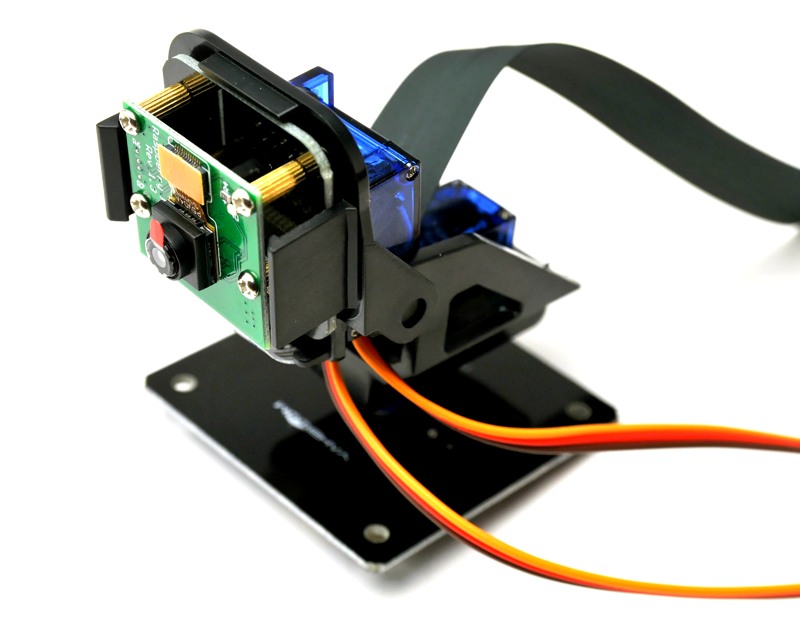
カメラマウント(1個)を用意します。カメラマウントには、2個のサーボモーターが取り付けられ、上下(チルト)と左右(パン)への二軸でカメラを移動させることができます。

カメラマウントにカメラモジュールを差し込みます。黒いケーブルは、カメラマウントの間から後方へ通しておきます。
次に、パン用サーボモーターの位置決めを行います。本体の電源スイッチがOFFになっていることを確認して、付属のバッテリーを接続します。
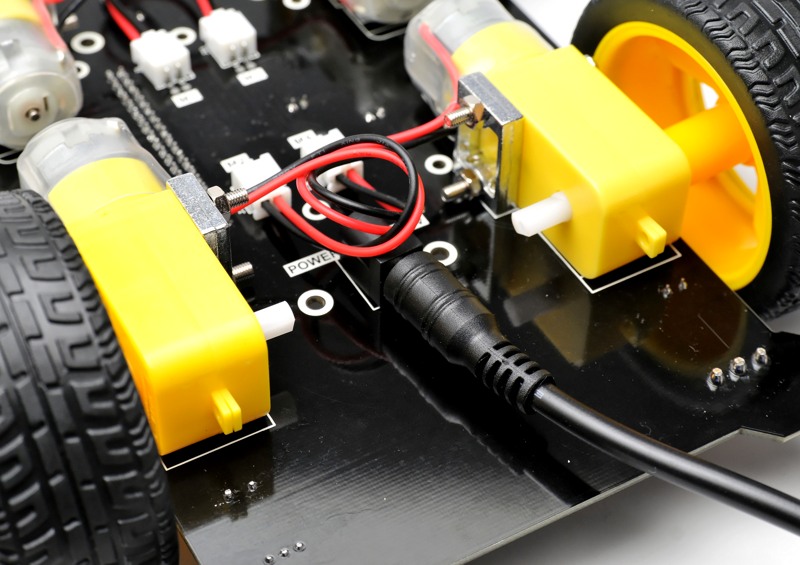
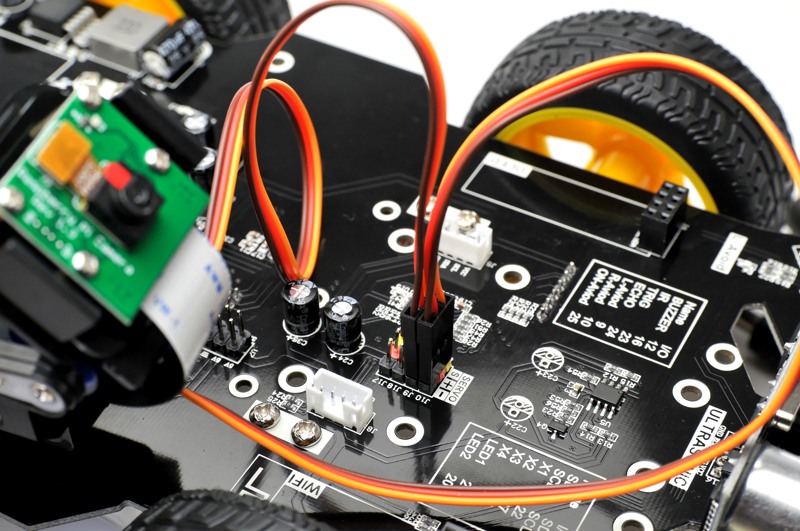
チルト用サーボモータ・パン用サーボモーターのケーブルを、それぞれサーボモーターインターフェースJ9・J10に接続します。向きに注意します。
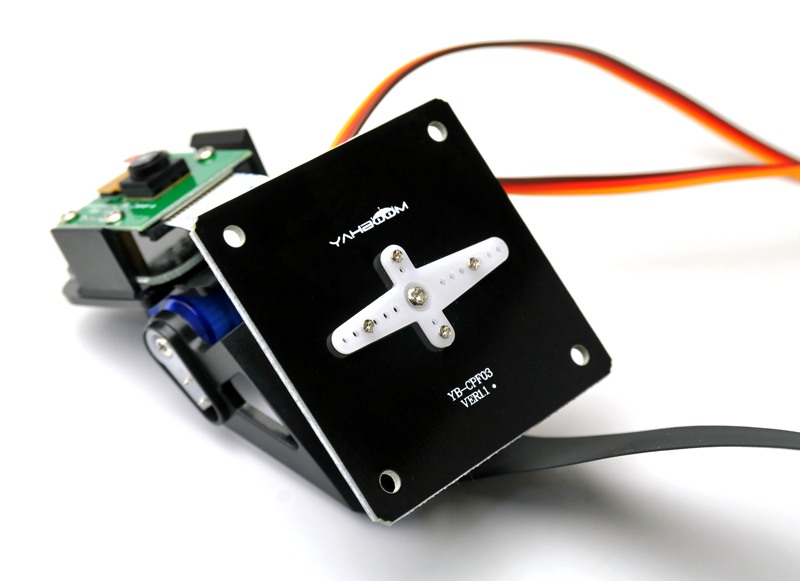
本体の電源スイッチをONにします。サーボモーターが動作して、初期位置に移動(回転)します。カメラマウントの台座を用意して、台座の穴にパン用サーボモーターの出力軸を差し込みます。このとき、台座の前方(Yahboomのマークがある辺側)へカメラが向くようにします。何度か、ON・OFFを繰り返して、カメラが前方へ向いていることを確認します。終わったら本体の電源スイッチをOFFにして、バッテリーとサーボモーターのケーブルを抜きます。
M2×4mmネジ(1個)を用意して、台座の裏からネジ止めします。このネジは4番の袋に入っています。
以上で、FPVカメラ(AIビジョンカメラ)の組み立てが完了しました。次回は、第三弾として「ライントラッキングセンサー・カメラ・バッテリーの取り付け」を紹介します。
おすすめ

Raspberry Pi 4 ModelB 4GB 技適対応品【RS・OKdo版】
Broadcom BCM2711 Quad core Cortex-A72 (ARM v8) 64-bit SoC @ 1.5GHz(4コア)

Raspberry Pi カメラモジュール【Raspberry Pi Camera V2】
Raspberry Pi Camera V2 ラズベリーパイ用カメラモジュール。動画対応 1920×1080 (H.264 1080p@30fps、720p@60fps、640x480p@90fps)


Yahboom メカナムホイールロボットカー omni:bit
この全方向移動スマートカーは、146個のブロック、4個のビルディングブロックモーター、および4個の全方向性ホイールで構成されています。






