Raspbot AI Vision Robot Carを組み立てる(3)

Raspbot AI Vision Robot Carは、独立した4つの駆動輪と二軸の高解像度カメラを搭載したAI学習用のプログラミングロボットカーです。本記事は、組み立て手順の第三弾として「ライントラッキングセンサー・カメラ・バッテリーの取り付け」を紹介します。
Raspbot AI Vision Robot Carとは
Raspbot AI Vision Robot Car
Yahboom(中国名:亚博)のRaspbot AI Vision Robot Carは、独立した4つの駆動輪と二軸の高解像度カメラを搭載したAI学習用のプログラミングロボットカーです。「Raspbot AI Vision Robot Carを組み立てる(1)」で詳しく紹介しています。
Raspbot AI Vision Robot Carを組み立てる(3)
本記事は、組み立て手順の第三弾として「ライントラッキングセンサー・カメラ・バッテリーの取り付け」を紹介します。
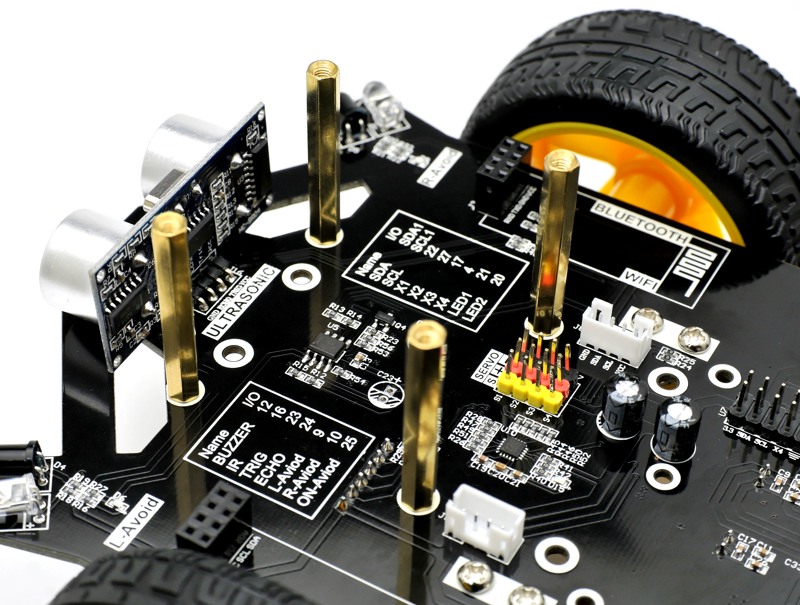
カメラ用スペーサーの取り付け
M3×34mmスペーサー(4個)・M3×6mmネジ(4個)を用意します。スペーサーは3番の袋、ネジは1番の袋に入っています。

カメラ用スペーサーの取り付け位置にネジ止めします。
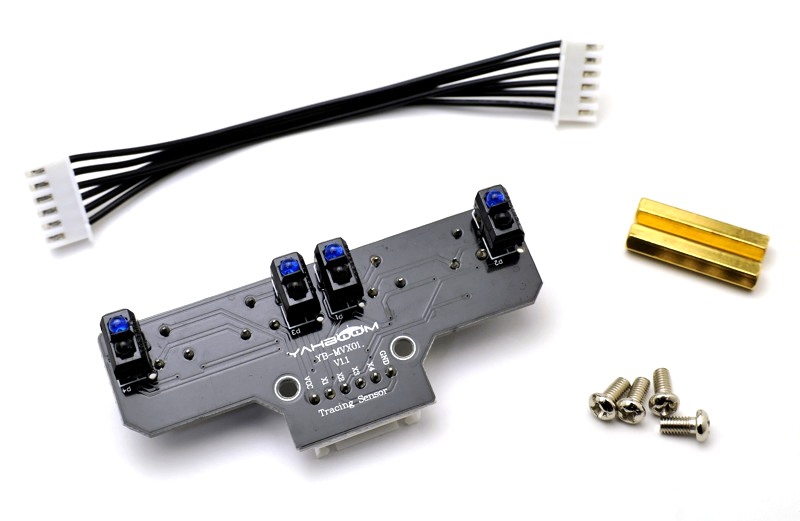
ライントラッキングセンサーの取り付け
ライントラッキングセンサー(1個)・ケーブル(1個)・M3×23mmスペーサー(2個)・M3×6mmネジ(4個)を用意します。スペーサーは7番の袋、ネジは1番の袋に入っています。
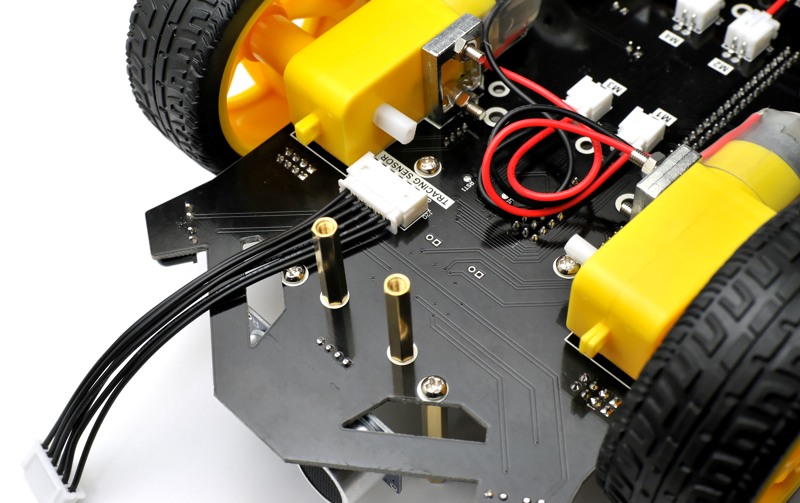
ライントラッキングセンサーの取り付け位置にスペーサーをネジ止めします。シャーシの裏側です。
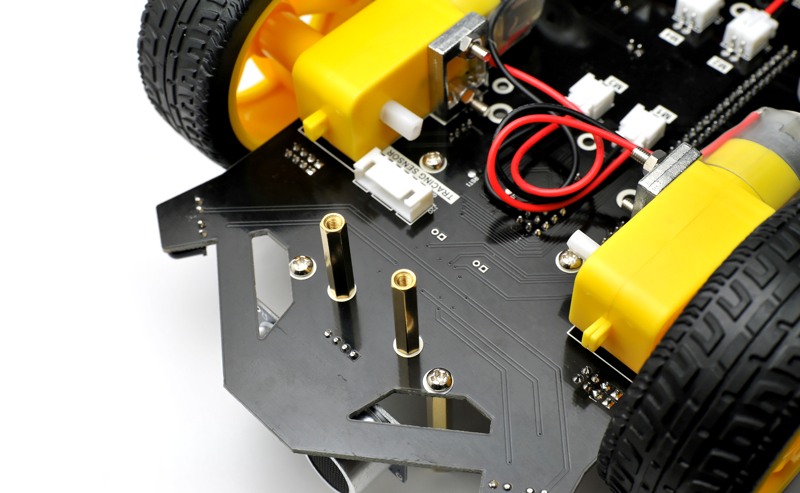
ライントラッキングセンサー用のコネクター(TRACING SENSOR)にケーブルを接続します。向きがあるので注意します。
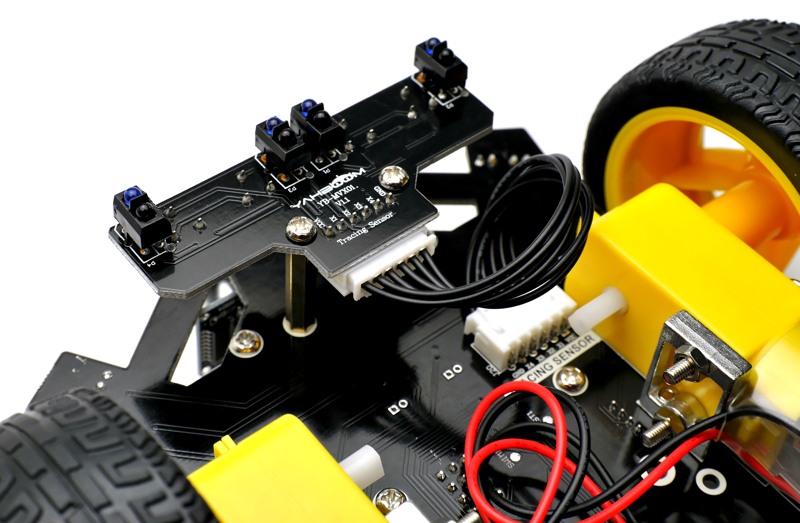
ライントラッキングセンサーをネジ止めして、ケーブルの他方を接続します。
カメラの取り付け
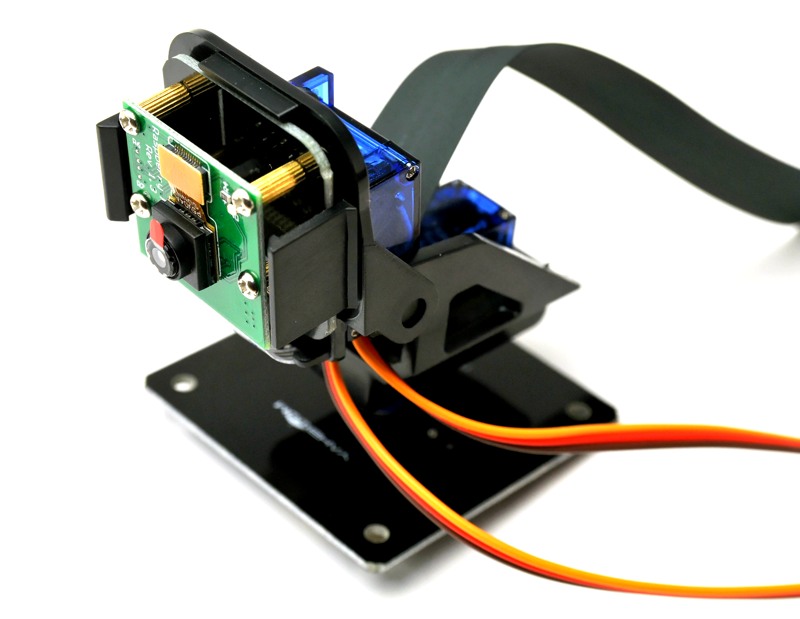
「FPVカメラ(AIビジョンカメラ)の組み立て」で組み立てたカメラを用意します。
M3×6mmのネジ(4個)を用意します。ネジは1番の袋に入っています。

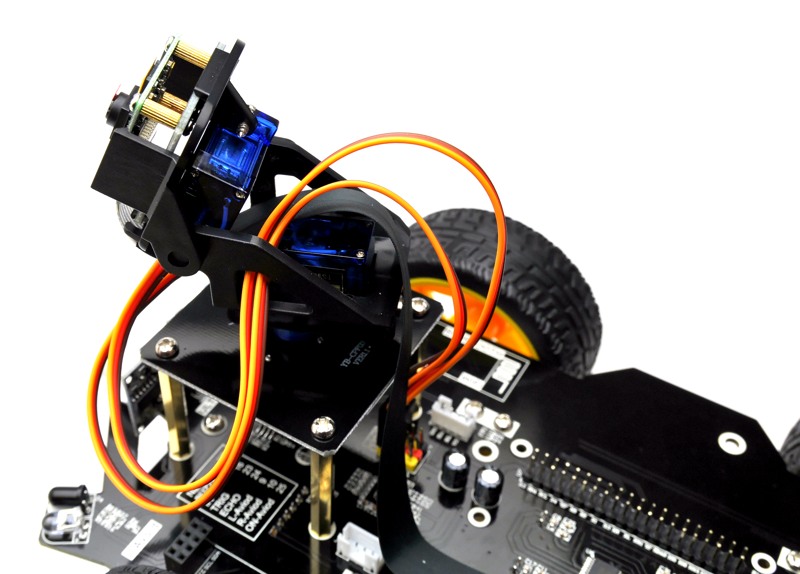
カメラが正面を向くようにして、スペーサーにネジ止めします。カメラが上下左右に動くので、サーボモーターのケーブルは余裕を持たせて配線します。
チルト用サーボモータ・パン用サーボモーターのケーブルを、それぞれサーボモーターインターフェースJ9・J10に接続します。向きに注意します。
バッテリーの取り付け
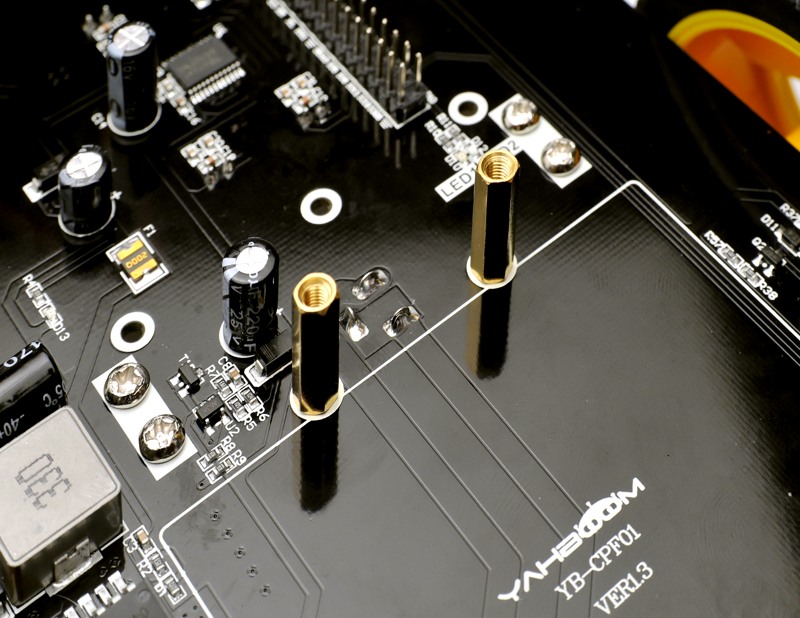
M3×16mmスペーサー(2個)・M3×6mmネジ(2個)を用意します。スペーサーは6番の袋、ネジは1番の袋に入っています。

バッテリーの固定位置にスペーサーをネジ止めします。
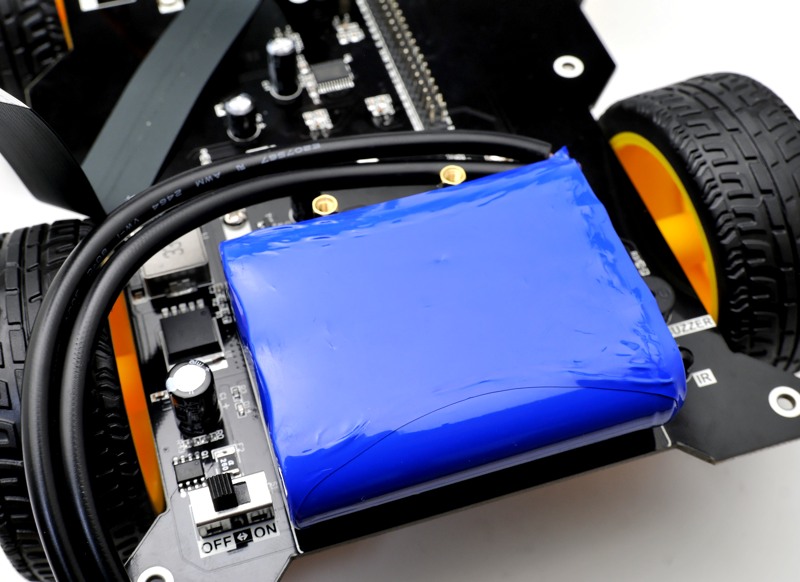
バッテリー(1個)・面ファスナー(1個)を用意します。

面ファスナーの一方のはく離紙をはがして、バッテリーの取り付け位置に貼り付けます。

面ファスナーのはく離紙をはがして、バッテリーを取り付けます。
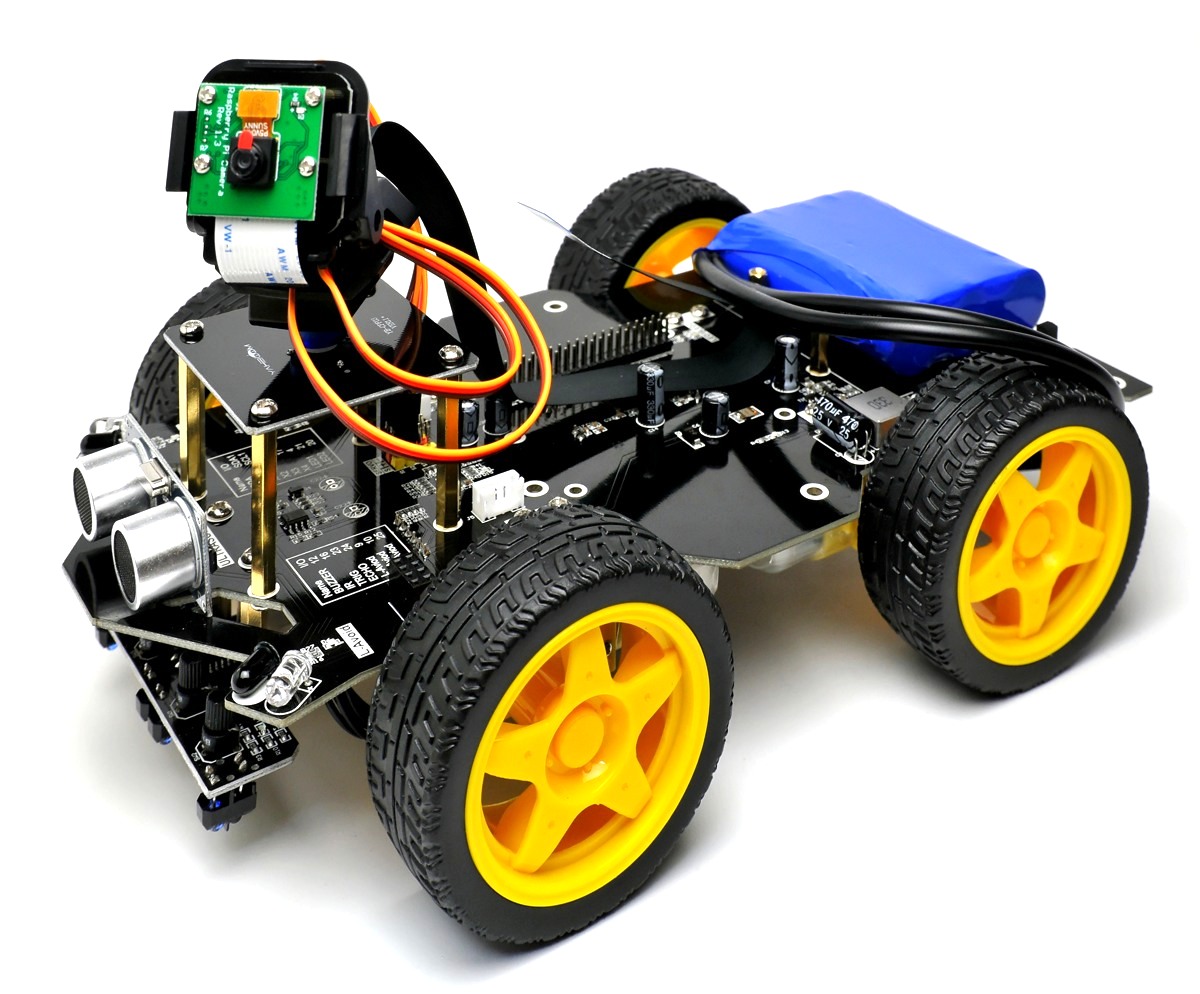
以上で、ライントラッキングセンサー・カメラ・バッテリーの取り付けが完了しました。次回は、第四弾として「Raspberry Pi 4の取り付け」を紹介します。
おすすめ

Raspberry Pi 4 ModelB 4GB 技適対応品【RS・OKdo版】
Broadcom BCM2711 Quad core Cortex-A72 (ARM v8) 64-bit SoC @ 1.5GHz(4コア)

Raspberry Pi カメラモジュール【Raspberry Pi Camera V2】
Raspberry Pi Camera V2 ラズベリーパイ用カメラモジュール。動画対応 1920×1080 (H.264 1080p@30fps、720p@60fps、640x480p@90fps)


Yahboom メカナムホイールロボットカー omni:bit
この全方向移動スマートカーは、146個のブロック、4個のビルディングブロックモーター、および4個の全方向性ホイールで構成されています。






