Tiny:bit smart robot car

独立した二つの駆動輪を持つ教育市場向けのプログラミングロボットカー「Tiny:bit smart robot car」を紹介します。
1.Tiny:bit smart robot carの紹介
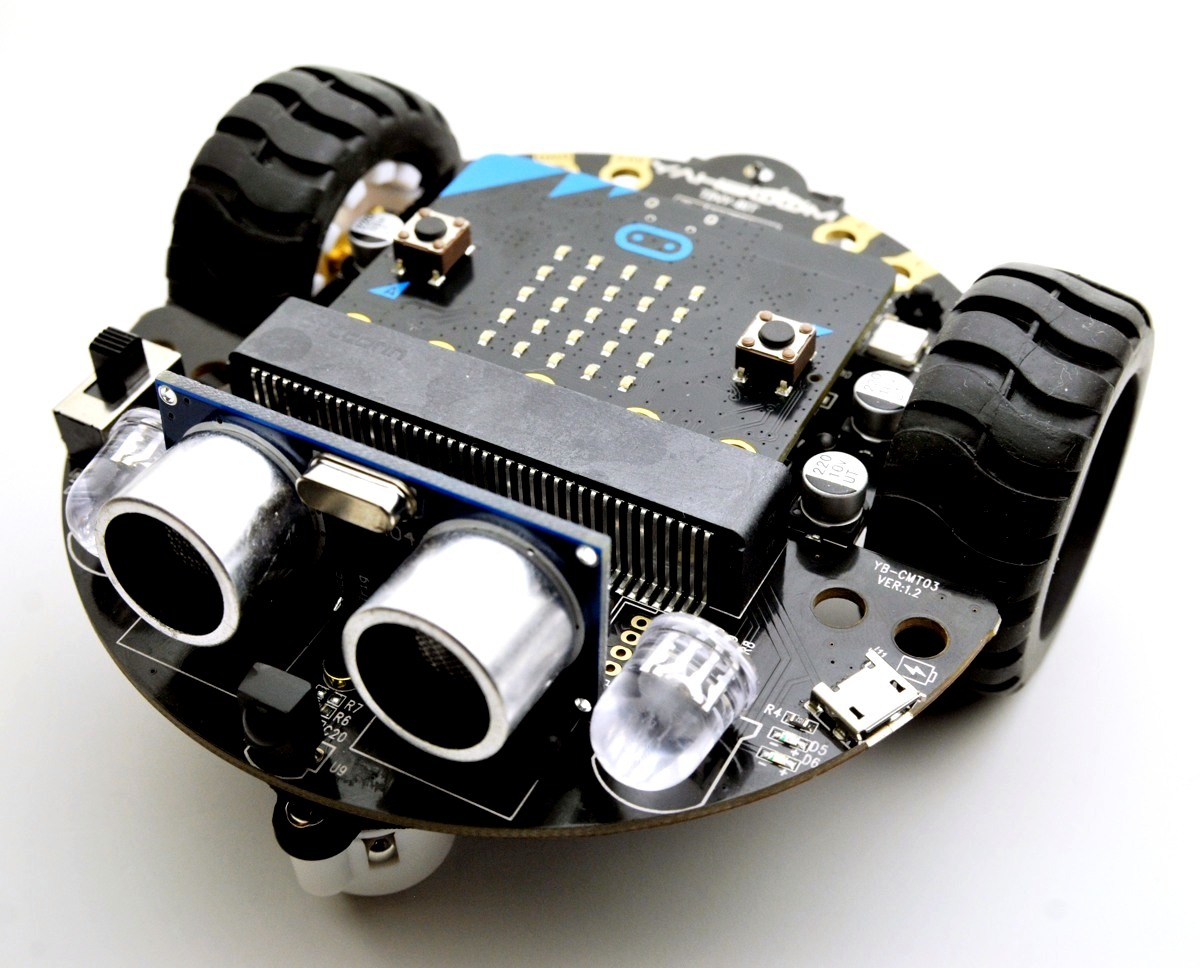
Yahboom(中国名:亚博)のTiny:bit smart robot carは、独立した二つの駆動輪を持つ教育市場向けのプログラミングロボットカーです。別売りのmicro:bitを搭載することで、駆動輪などをプログラミングで制御することができます。円形のシャーシ(基板)に対して、micro:bitを水平に取り付けるため、全高が低く、コンパクトでキュートな姿をしています。
Tiny:bit smart robot carには、18650型の充電池(1本)が同梱されています。シャーシ(基板)の裏側にバッテリーケースがあり、充電池を充電するための回路を搭載しています。
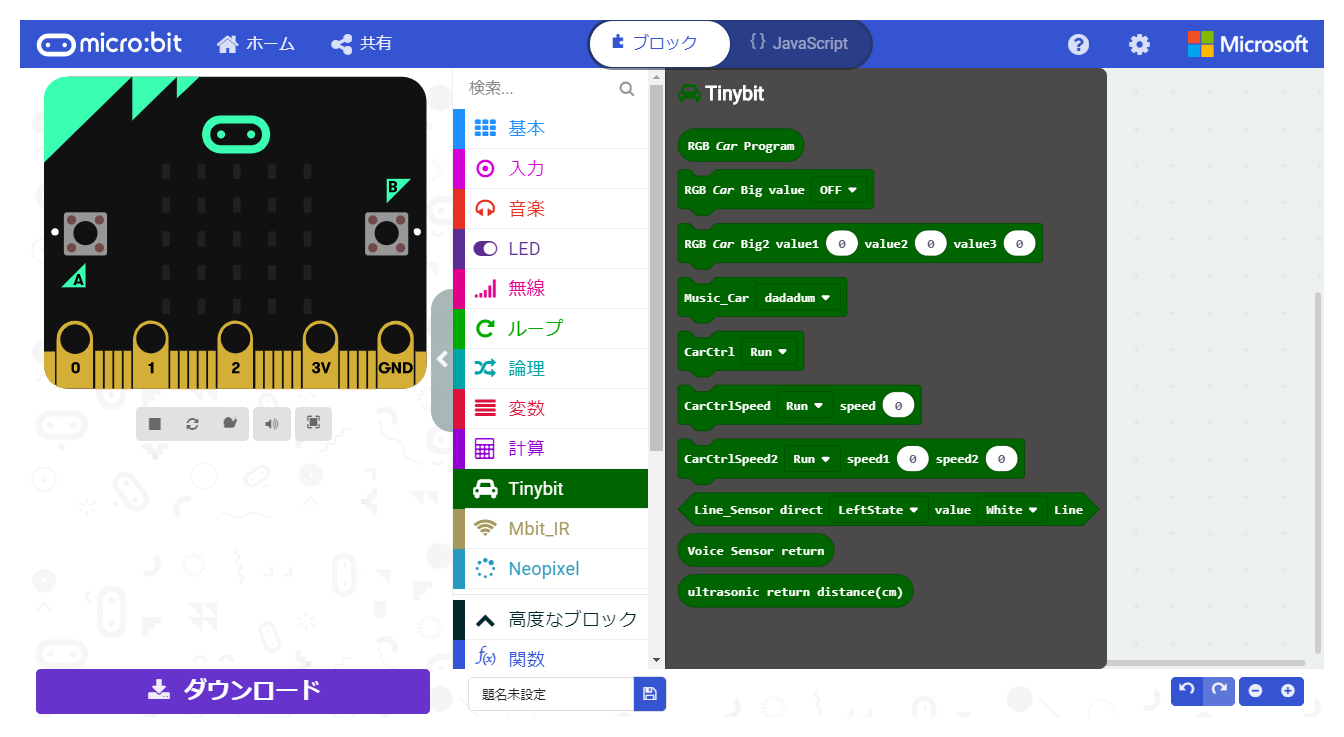
プログラミング環境
Tiny:bit smart robot carのプログラミングは、MakeCodeエディターで行います。拡張機能「Tinybit」「Mbit_IR」「Neopixel」を使って、Tiny:bit smart robot carの各機能を制御します。
2.Tiny:bit smart robot carの機能
Tiny:bit smart robot carは、縦105mm×横105mm×高さ45mmの小さなボディにさまざまなデバイスとセンサーを搭載しています。
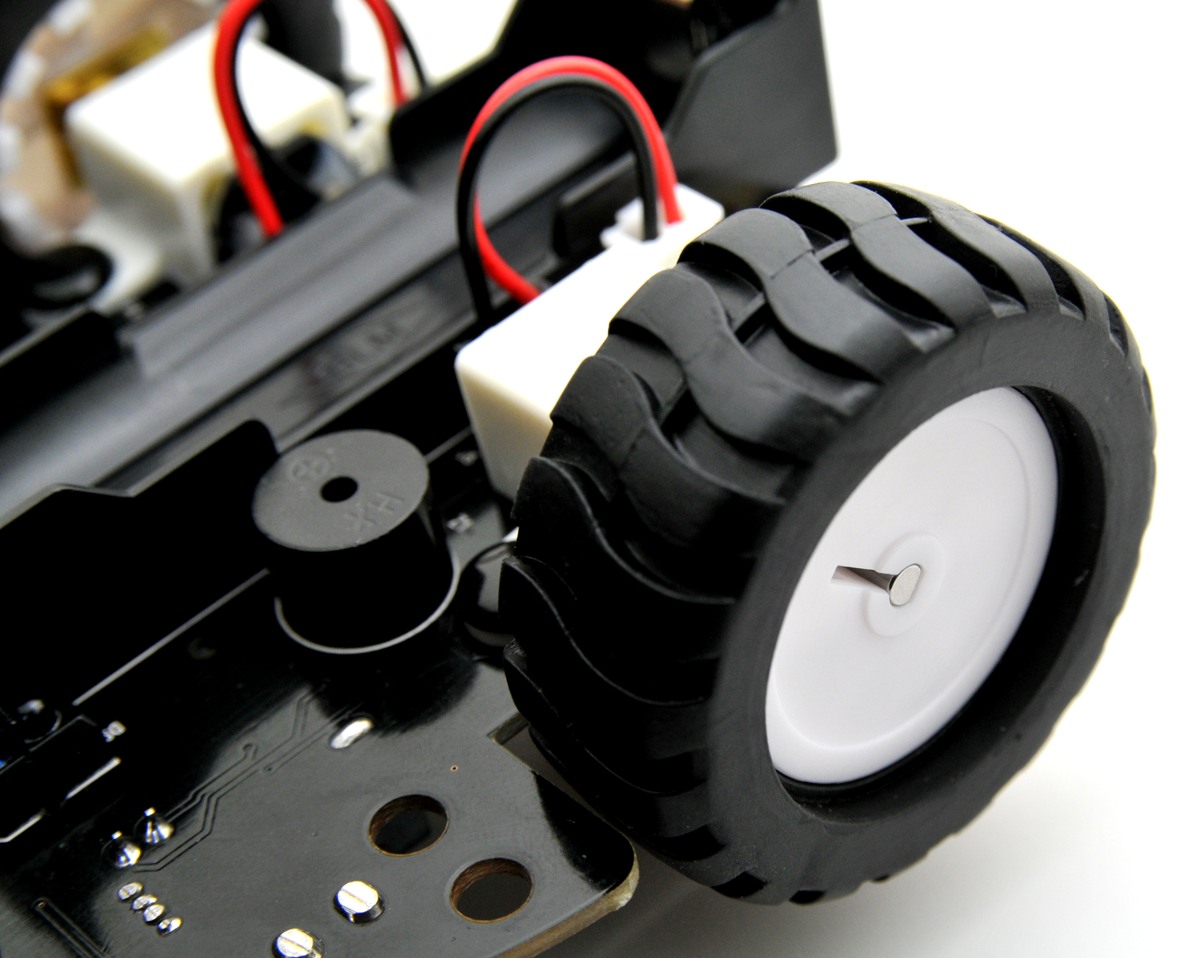
駆動輪(後輪)
駆動輪(後輪)は、メタルギアを採用した耐久性のある強力な小型ギヤードモーターで動作します。拡張機能を使って、Run(前進)・Back(後進)・Left(左旋回)・Right(右旋回)・SpinLeft(左回転)・SpinRight(右回転)・Stop(停止)を指定します。また、各モーターの回転速度を指定することができます。
モーターの制御用コントローラーとして、マイクロエレクトロニクスの「STM8S003F3P6」を搭載し、I2Cでmicro:bitと接続されています。
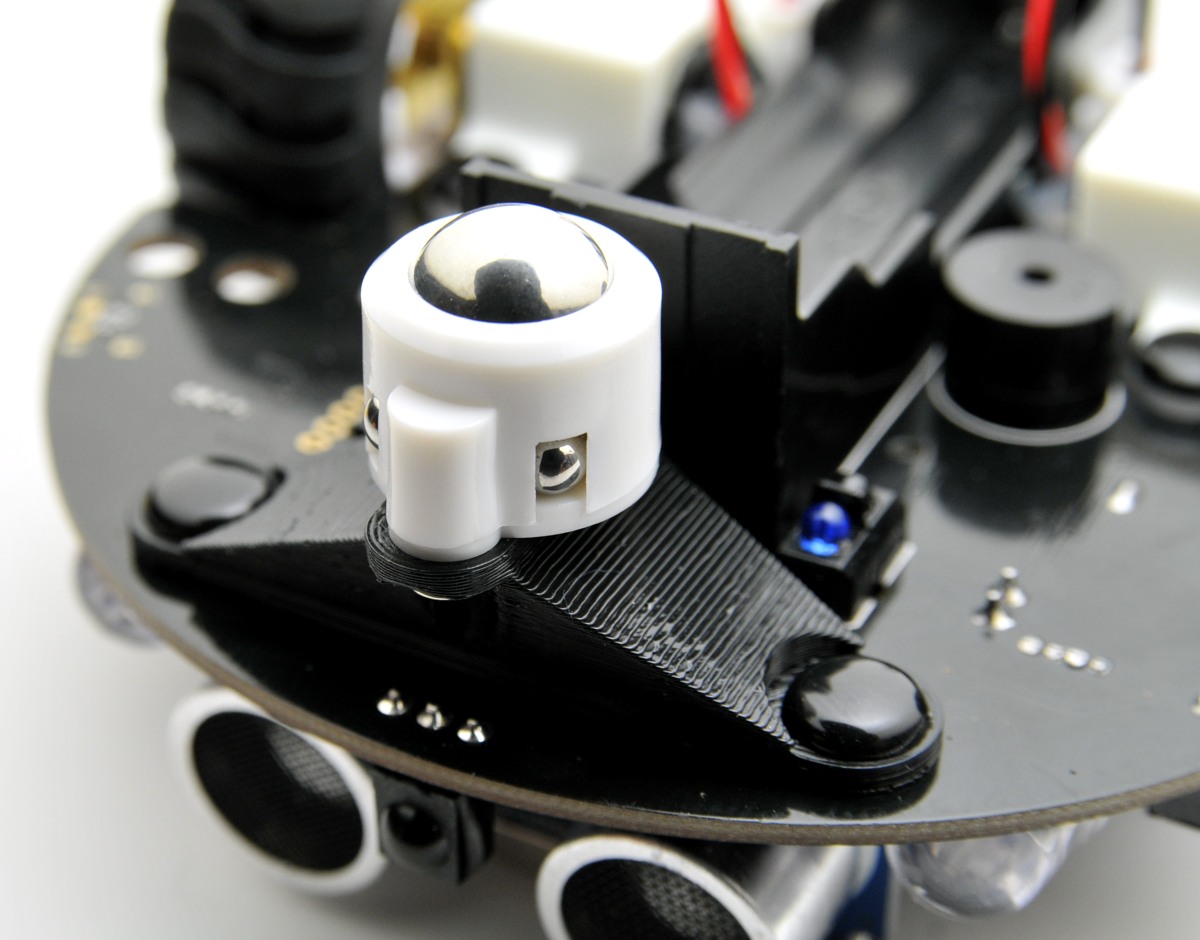
ユニバーサルホイール(前輪)
前輪は、ユニバーサルホイール(フリーボールベアリング)で、あらゆる方向へ移動します。
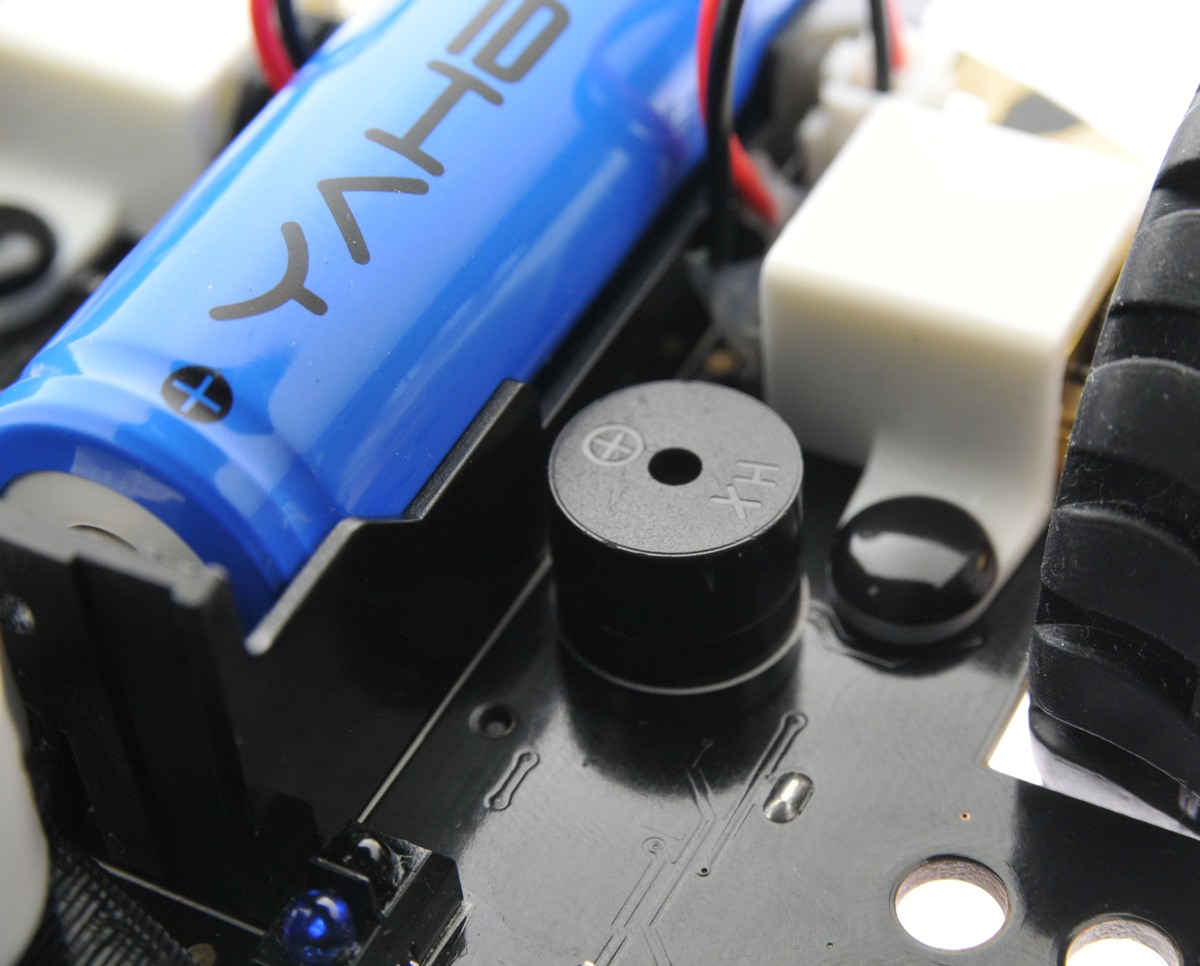
ブザー
シャーシ(基板)の裏面にブザー(Z1)があります。端子P0に接続されています。
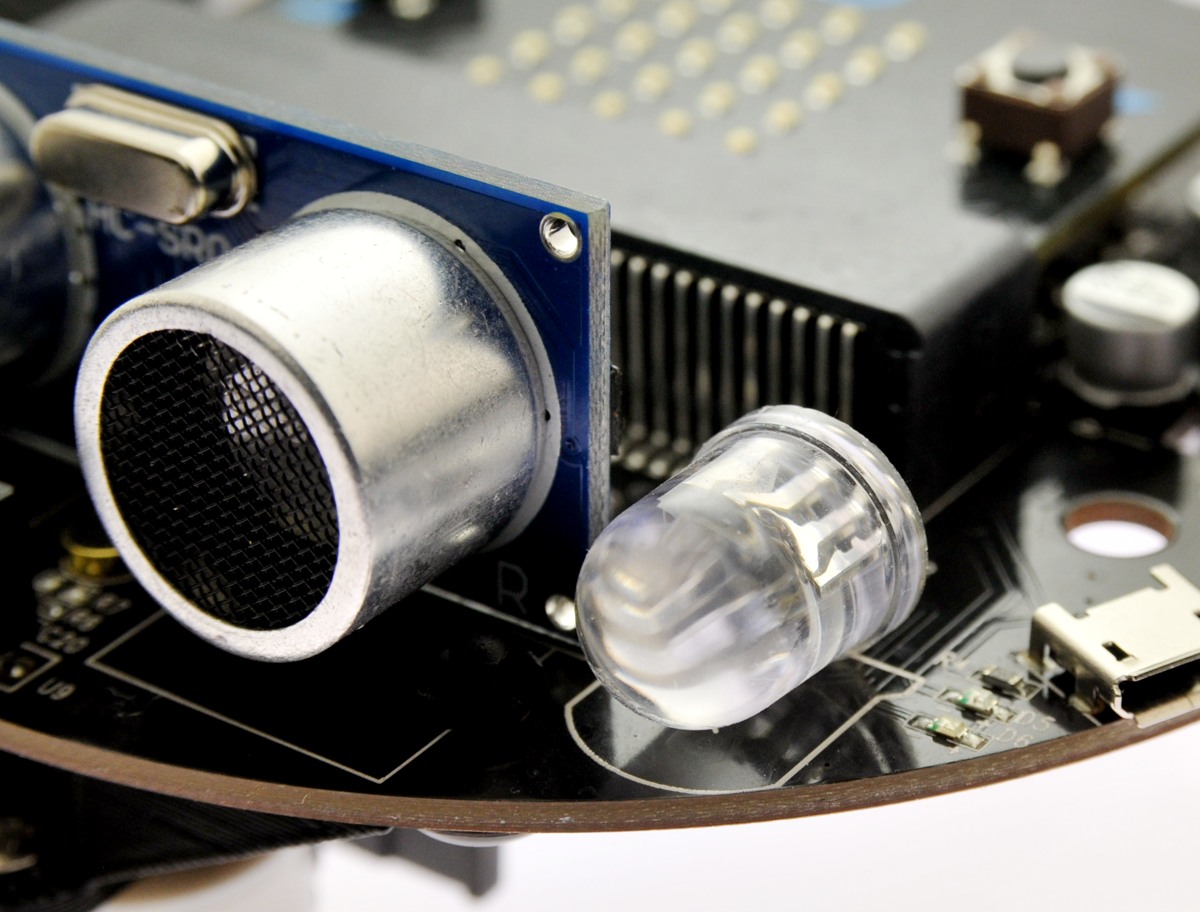
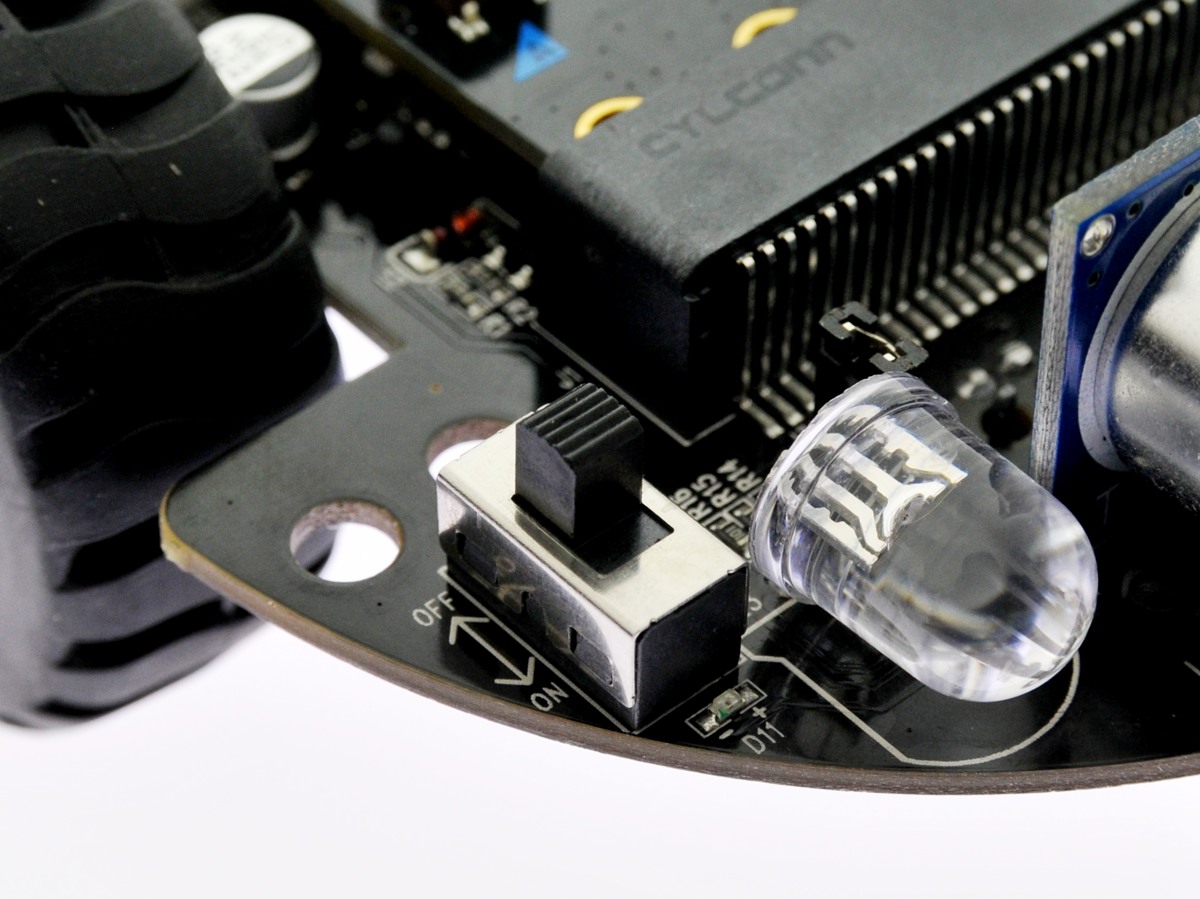
前照灯(2個)
シャーシ(基板)の前部に2個のフルカラーLED(L2・L3)を搭載しています。直径が10mmの大型LEDなので存在感があり、目を引きます。前方を明るく照らすことができます。
前照灯の制御用コントローラーとして、マイクロエレクトロニクスの「STM8S003F3P6」を搭載し、I2Cでmicro:bitと接続されています。
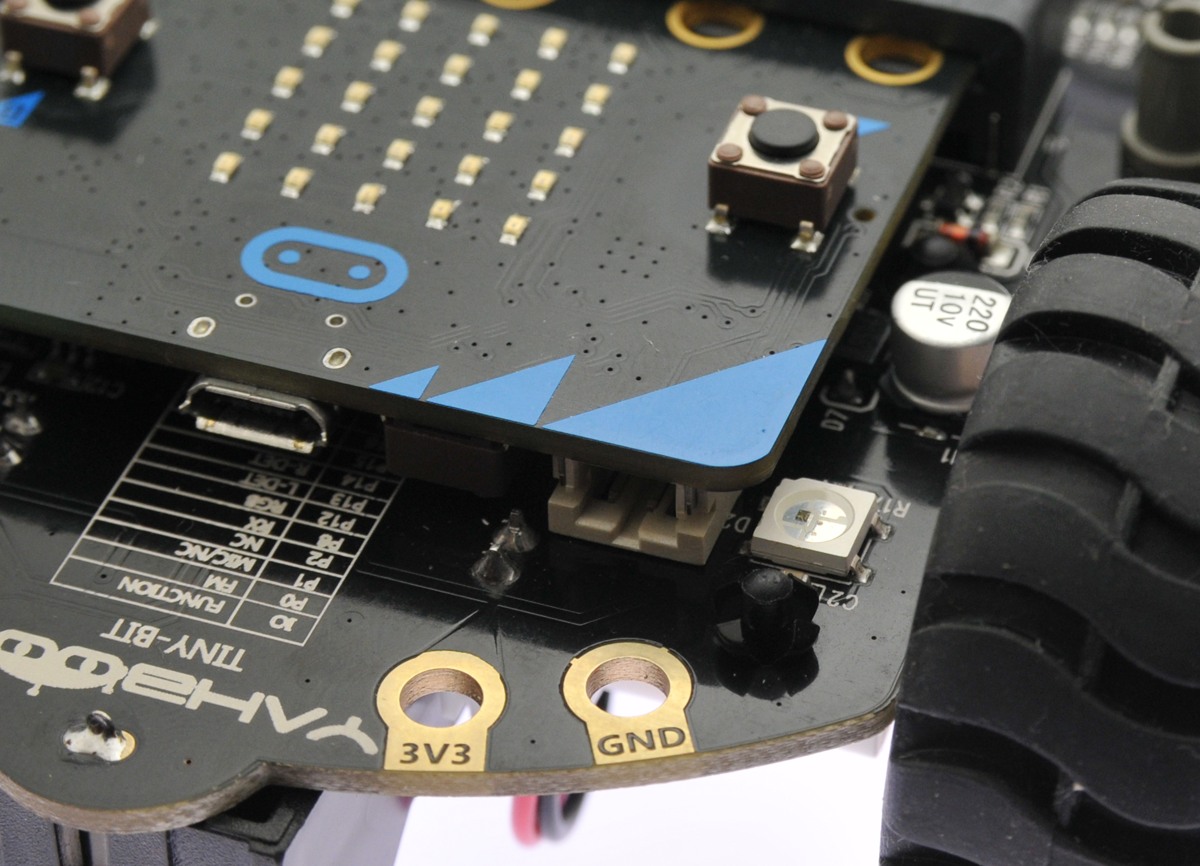
RGB LED(2個)
シャーシ(基板)の上部に2個のRGB LED(D2・D3)を搭載しています。端子P12に接続されています。NeoPixelの拡張機能を使って点灯させることができます。
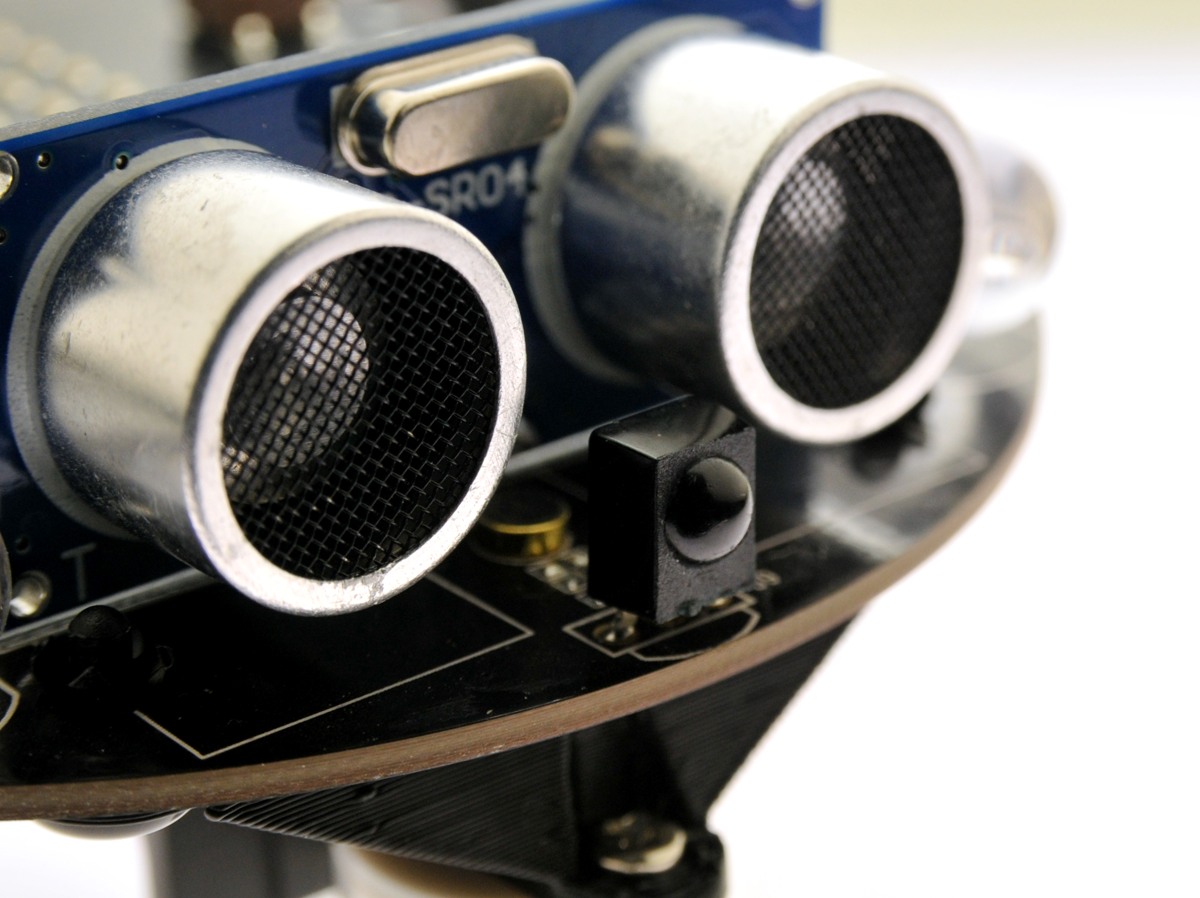
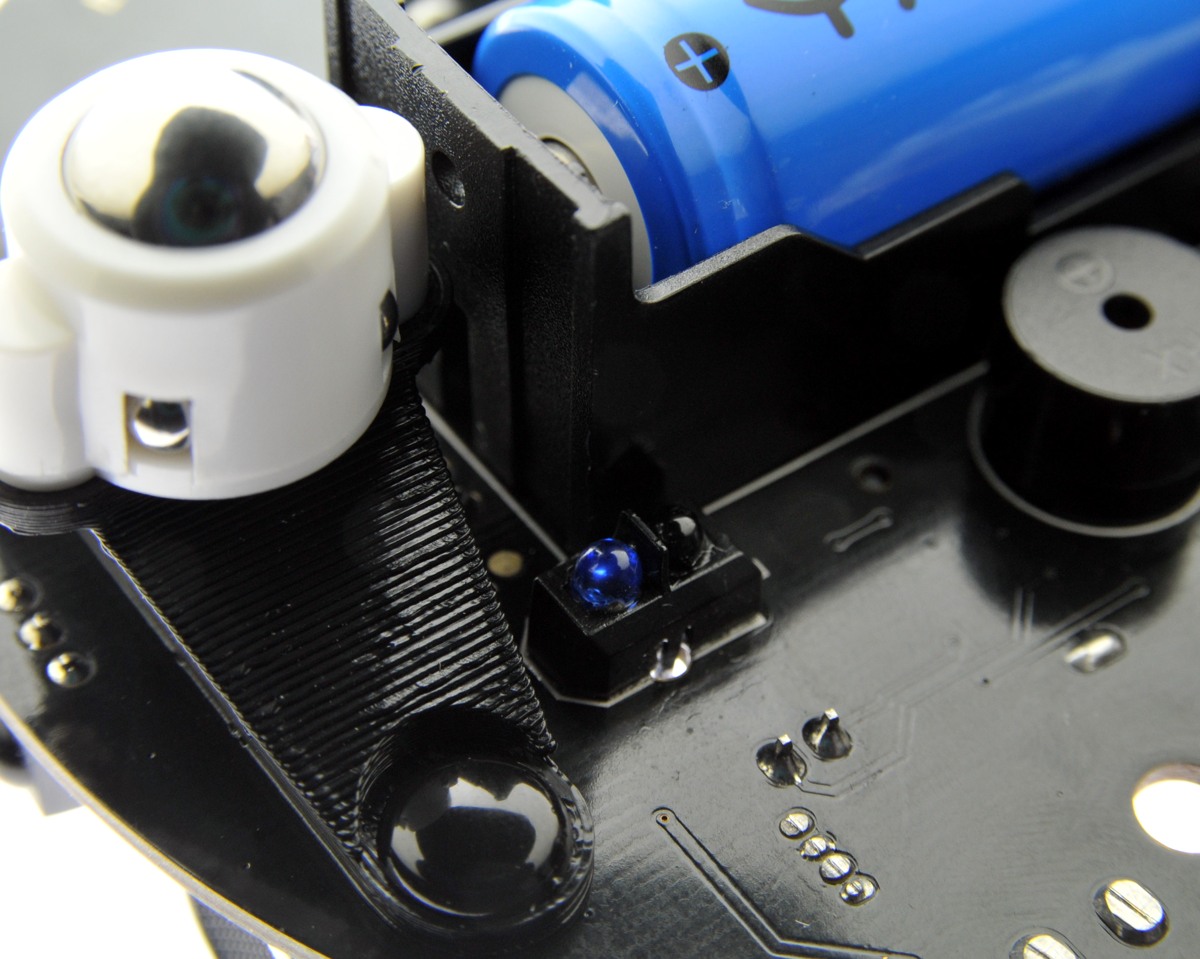
赤外線受信(リモコン)モジュール
シャーシの前部に赤外線受信(リモコン)モジュールを搭載しています。端子P8に接続されています。
リモコンが同梱されているので、リモコンを使ったプログラミングを手軽に楽しむことができます。

赤外線グレースケールセンサー(ライントラッキングセンサー)
シャーシ(基板)の裏面に2個の赤外線グレースケールセンサー(ライントラッキングセンサー)(D8・D9)を搭載しています。左側が端子P13、右側が端子P14に接続されています。
ライントラッキングセンサーを使ったプログラミングを、手軽に楽しむための走行用マップが同梱されています。
HC-SR04超音波センサー
シャーシ(基板)の前部にHC-SR04超音波センサーを搭載しています。HC-SR04のEchoが端子P15、Triggerが端子P16に接続されています。

バッテリーボックス
シャーシ(基板)の裏面にバッテリーボックスがあり、同梱されている18650型の充電池(1本)をセットします。

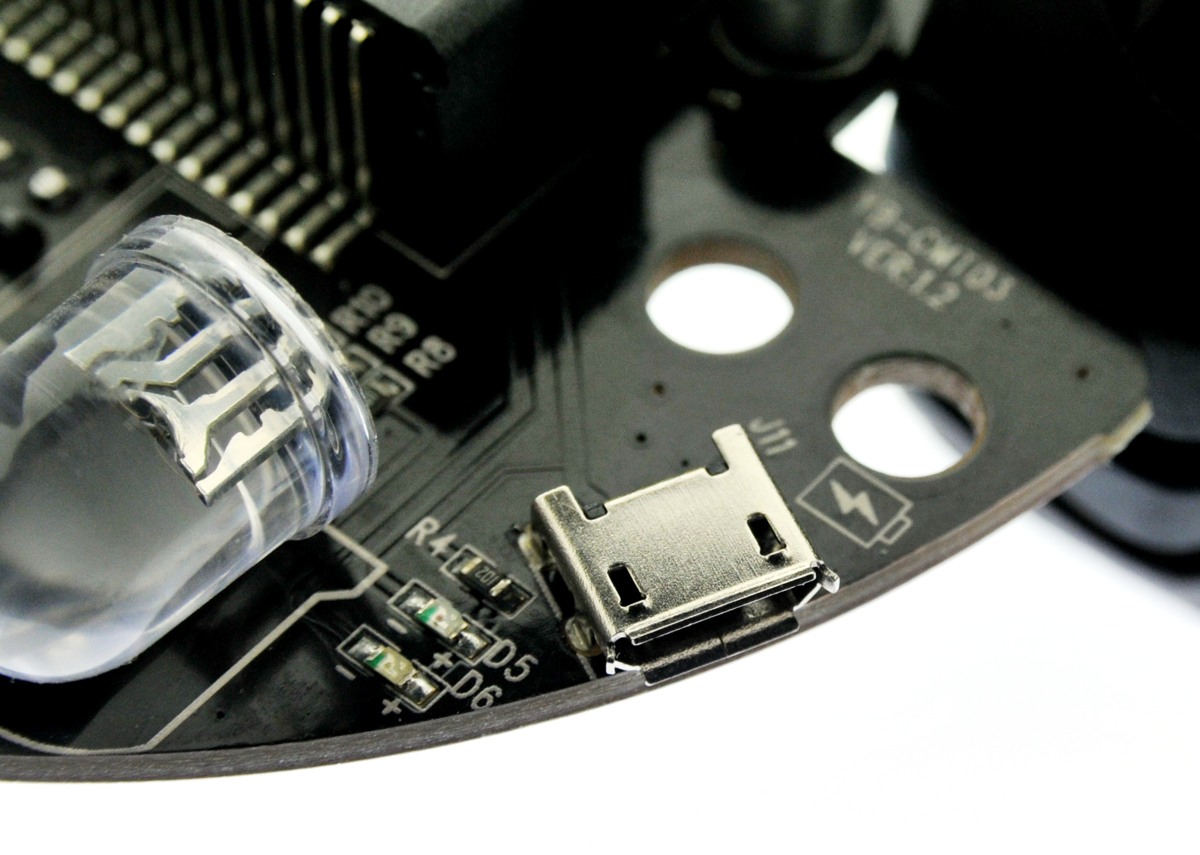
充電回路
充電池を充電するための回路が内蔵されています。USBケーブルを使って充電することができます。充電中は赤色のLED(D5)、満充電で緑色のLED(D6)が点灯します。
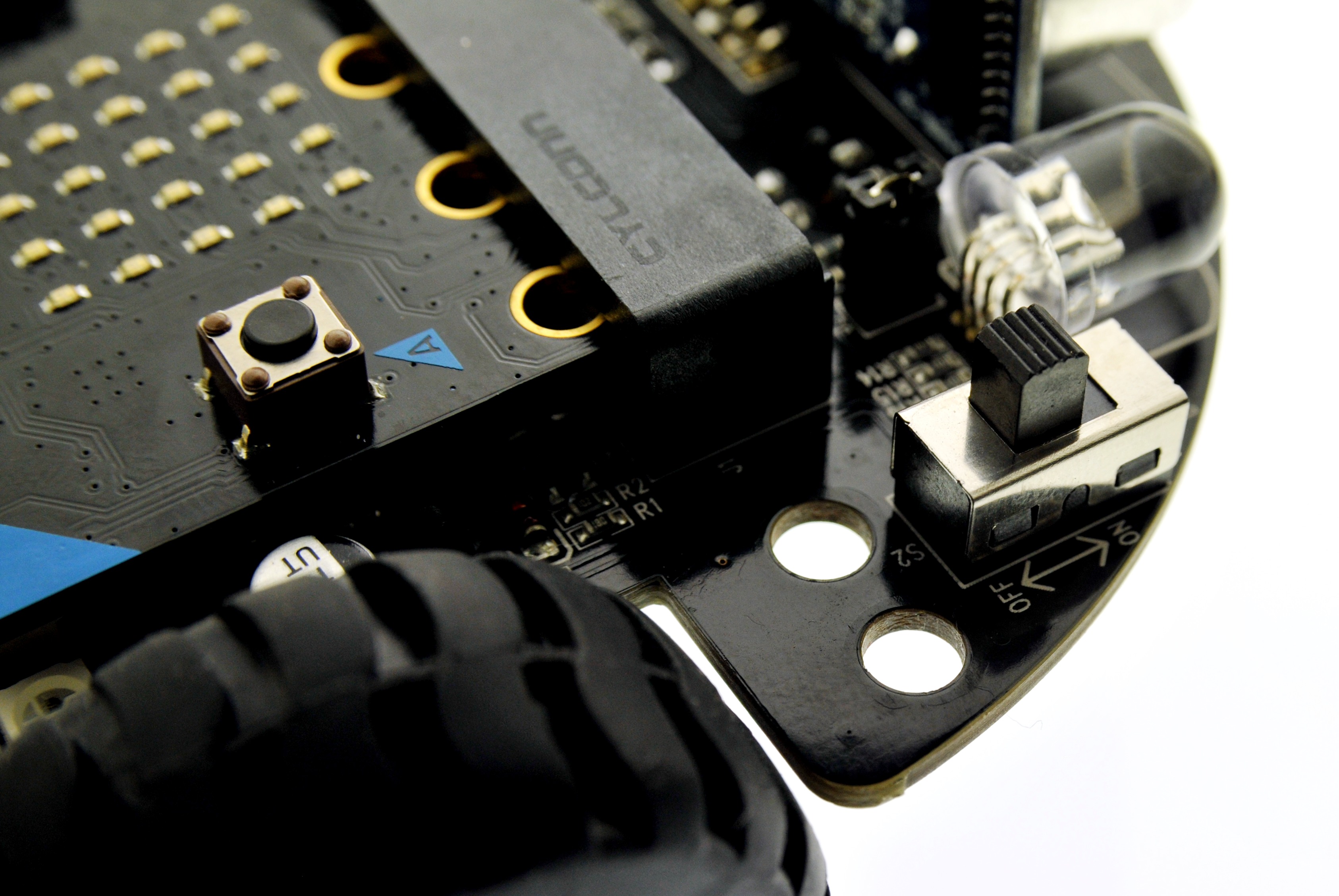
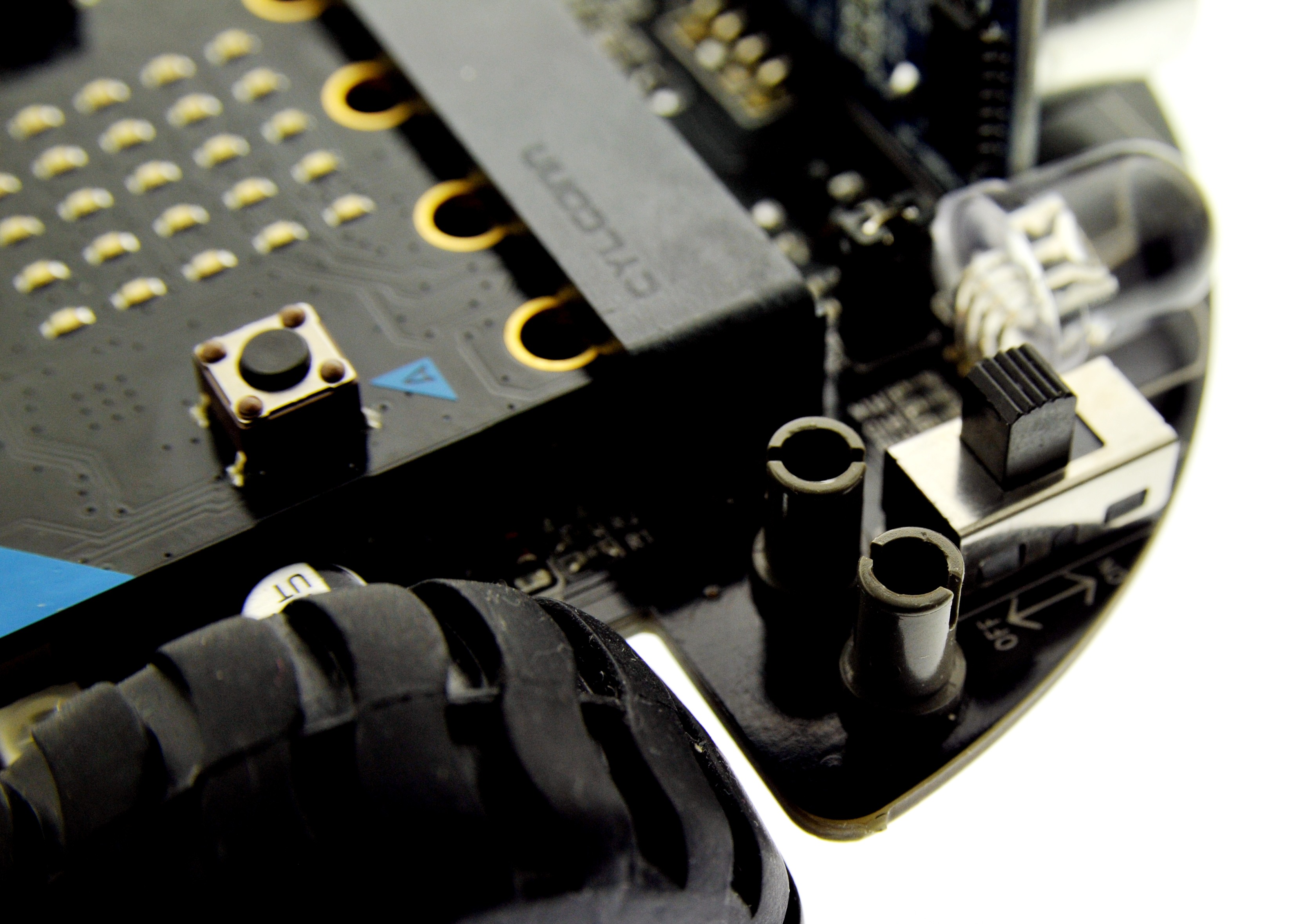
電源スイッチ
スライド式の電源スイッチです。ON時に赤色のLED(D11)が点灯します。
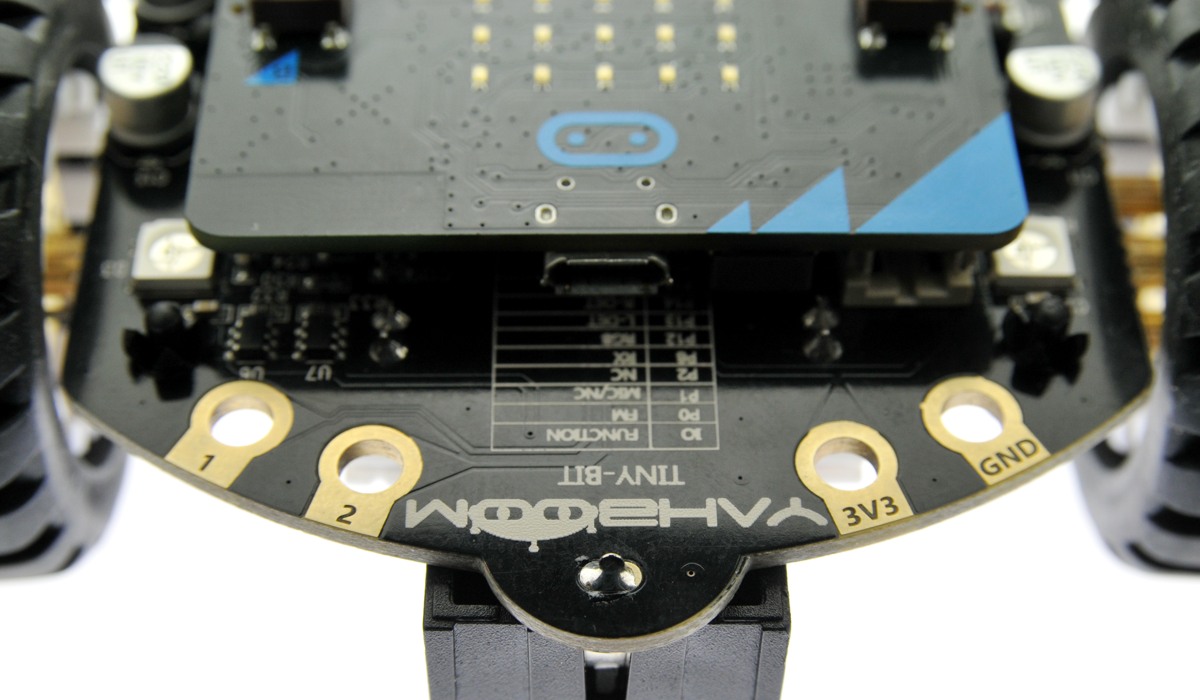
エッジコネクター
シャーシ(基板)の後部にmicro:bitのエッジコネクターのうち、P1・P2・3.3V・GND端子を搭載しています。ワニ口クリップなどで外部のセンサーや回路と接続することができます。
マイクロフォン
シャーシ(基板)の前部にマイクロフォン(M1)を搭載しています。拡張機能を使って、音の大きさを測定できます。

LEGO接続用の穴
LEGOを接続できる穴があります。LEGOテクニックシリーズのピンや十字軸を挿すことができます。
LEGOテクニックシリーズのピンを差し込んだ例です。
Tiny:bit smart robot carの組み立て方法を「5-9.Tiny:bit smart robot car【組み立て編】」で紹介しています。
おすすめ品


Yahboom micro:bit smart robot car with IR and APP
独立した二つの駆動輪を持つSTEM教育用のグラフィカルプログラミングロボットです。






