マックイーンホイールローダー【無線操縦編】

マックイーンホイールローダー(micro:Maqueen V4.0 + Mechanic-Loader)をmicro:Gamepadを使って無線操縦する方法を解説します。
5-14-1.マックイーンホイールローダーの無線操縦
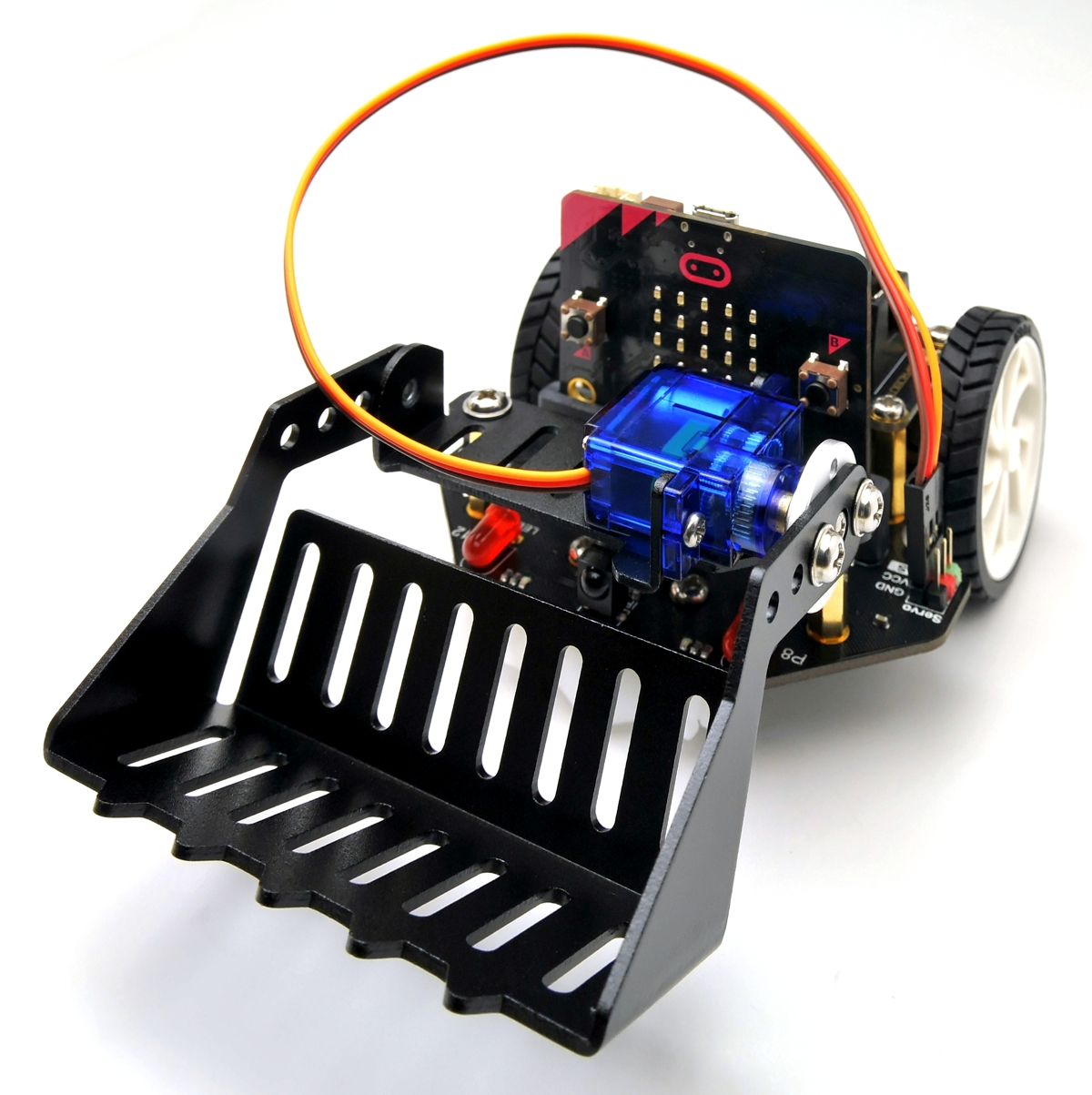
マックイーンホイールローダー
「5-13.micro:Maqueen V4.0 + Mechanic-Loader」では、micro:Maqueen V4.0にオプションとして用意されているMechanic-Loader(メカニックローダー)を取り付ける手順を紹介しました。サヌキテックネットでは、このmicro:Maqueen V4.0を「マックイーンホイールローダー」と呼ぶことにします。
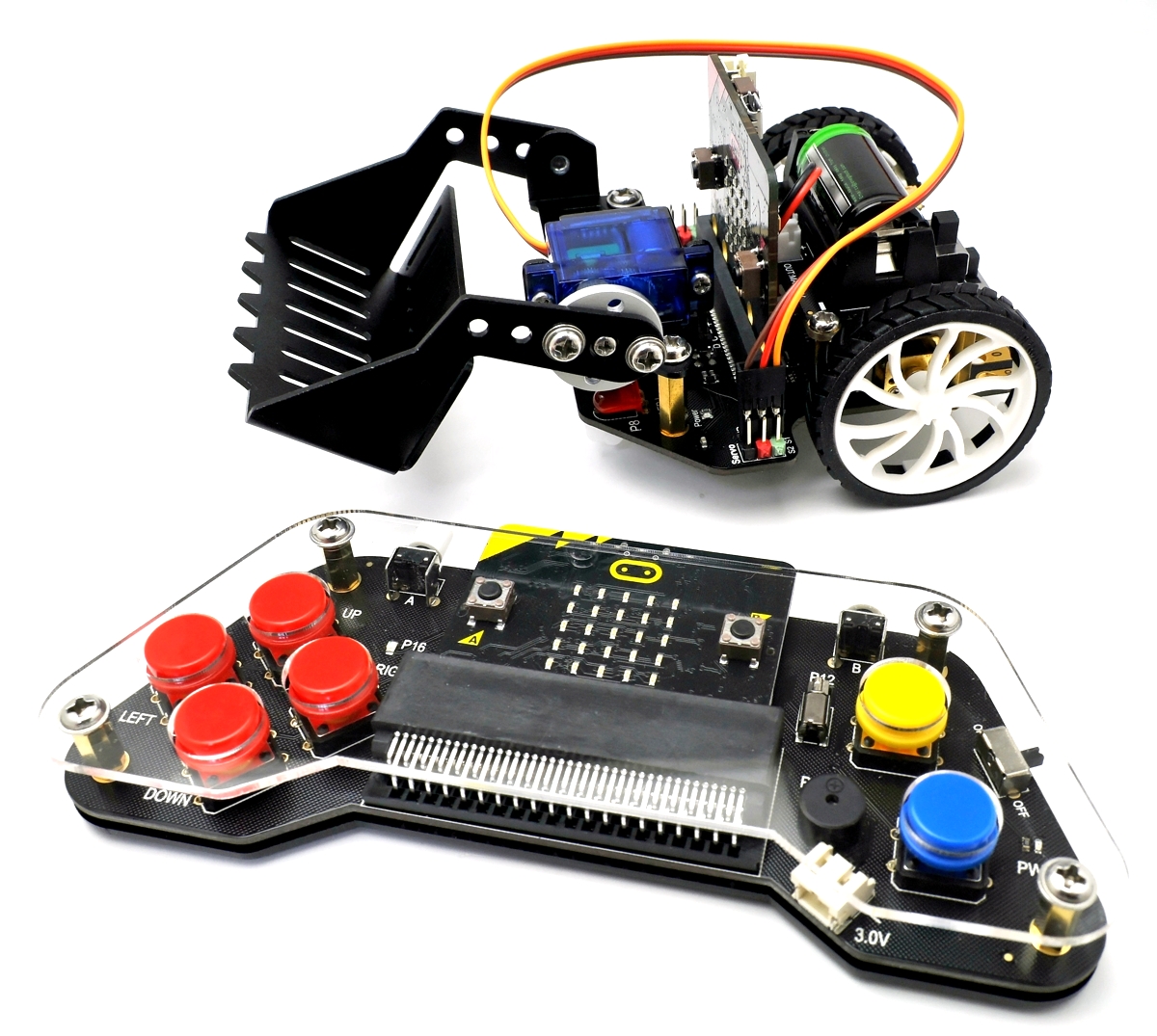
マックイーンホイールローダーの無線操縦
本記事では、マックイーンホイールローダーを無線操縦するプログラミングにチャレンジします。追加で用意するのは、micro:Gamepadとmicro:bitです。micro:Gamepadは、四方向ボタンとX・Yボタンを搭載したゲームパッドで、micro:bitを取り付けることによって無線操縦用のコントローラーになります。micro:Gamepadは「付録3-26.micro:Gamepad」で詳しく紹介しています。
マックイーンホイールローダーを無線操縦しているようすです。無線コントローラーの四方向ボタンで、前進・後進・左右への回転を行います。X・Yボタンを使って、ショベル(バケット)を上下します。また、A・Bボタンで、LEDの点灯・消灯を行います。
LEGOやダンボールなどで工事現場を作って遊ぶと楽しいよ!
プログラミング
プログラムは、無線コントローラー用とマックイーンホイールローダー用の二つ作ります。無線コントローラー用のプログラムは、どのボタンが押されているのかを判定して、その情報を無線機能によって送信します。マックイーンホイールローダー用のプログラムは、受信した情報に応じて、前進・後進・左右への回転、ショベル(バケット)の上下、LEDの点灯・消灯を行います。
5-14-2.このプログラムの動作に必要なもの
このプログラムの動作には、マックイーンホイールローダーの他に次のものが必要です。
- micro:bit本体
- micro:Gamepad
- パソコン(*1)
- USBケーブル(*1)
(*1):パソコン・USBケーブルは、プログラミングに必要なものです。
5-14-3.無線コントローラー用のプログラム
無線コントローラー用のサンプルプログラム(ブロック)です。拡張機能「https://github.com/DFRobot/pxt-gamePad」の追加が必要です。
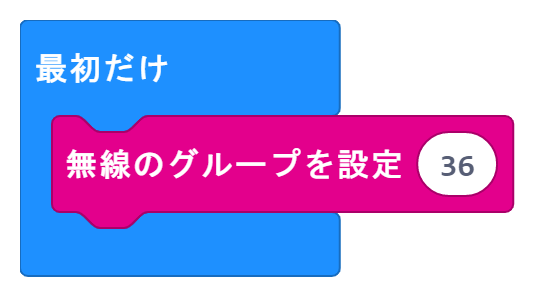
最初だけ実行されるプログラム
無線のグループ設定を行っています。グループの番号は、無線コントローラーとマックイーンホイールローダーで一致していれば36以外でもかまいません。
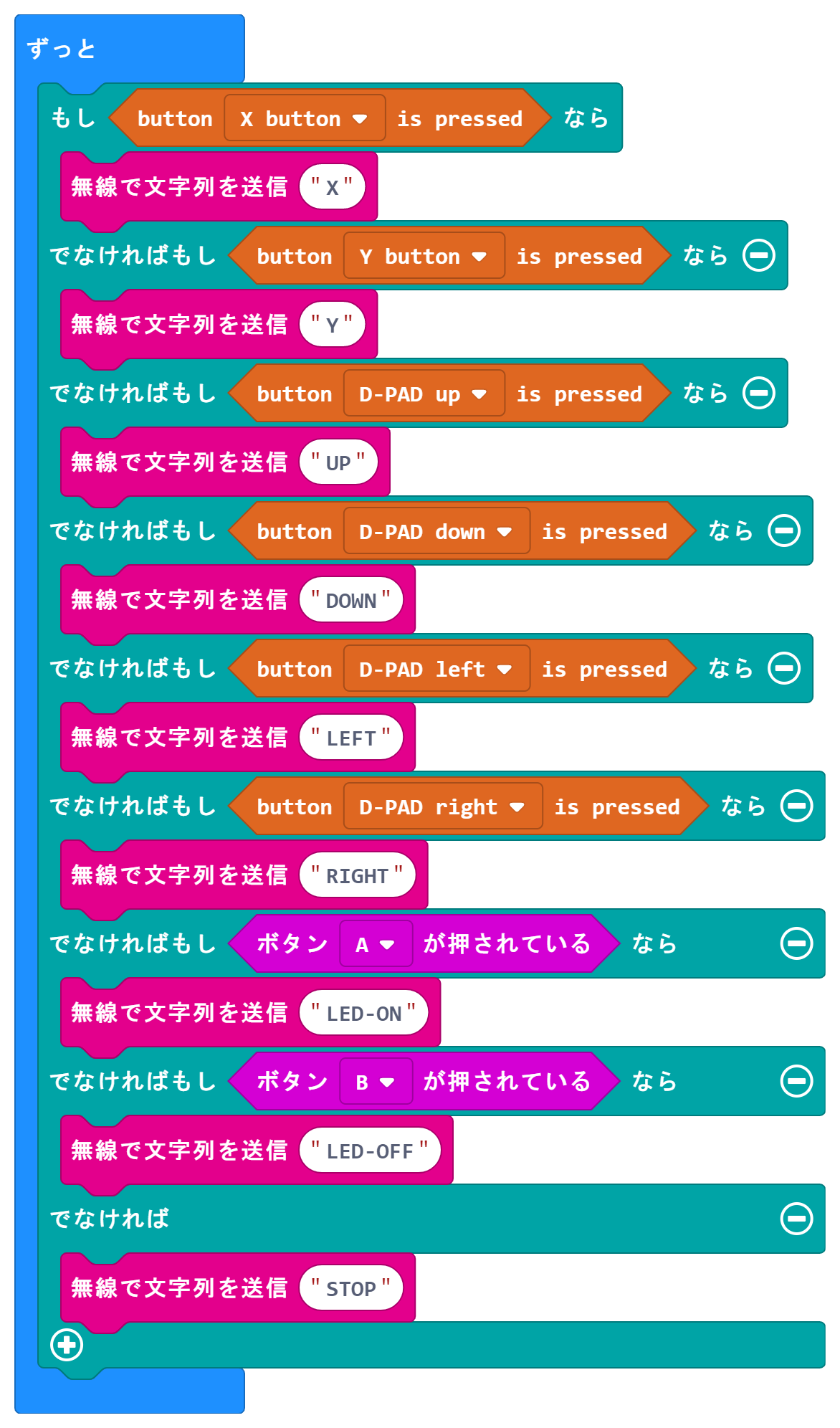
ずっと実行されるプログラム
どのボタンが押されているかを判定して、その情報を無線機能によって送信します。例えば、UPボタン(D-PAD up)が押されたら「UP」という文字列を送信します。
無線コントローラー用のサンプルプログラム(JavaScript)です。拡張機能「https://github.com/DFRobot/pxt-gamePad」の追加が必要です。
5-14-4.マックイーンホイールローダー用のプログラム
マックイーンホイールローダー用のサンプルプログラム(ブロック)です。拡張機能「https://github.com/DFRobot/pxt-maqueen」の追加が必要です。
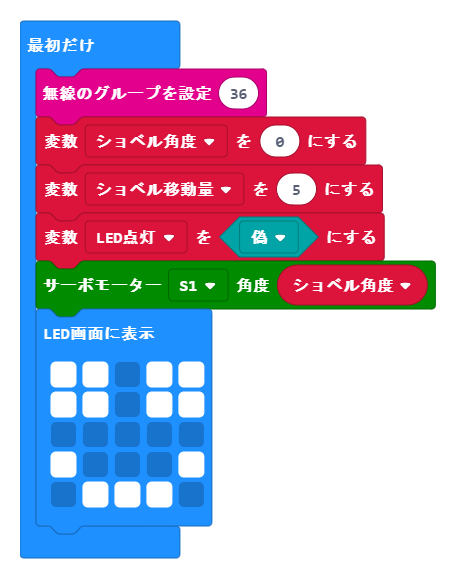
最初だけ実行されるプログラム
無線のグループ設定と各種変数の初期化などを行っています。グループの番号は、無線コントローラーとマックイーンホイールローダーで一致していれば36以外でもかまいません。
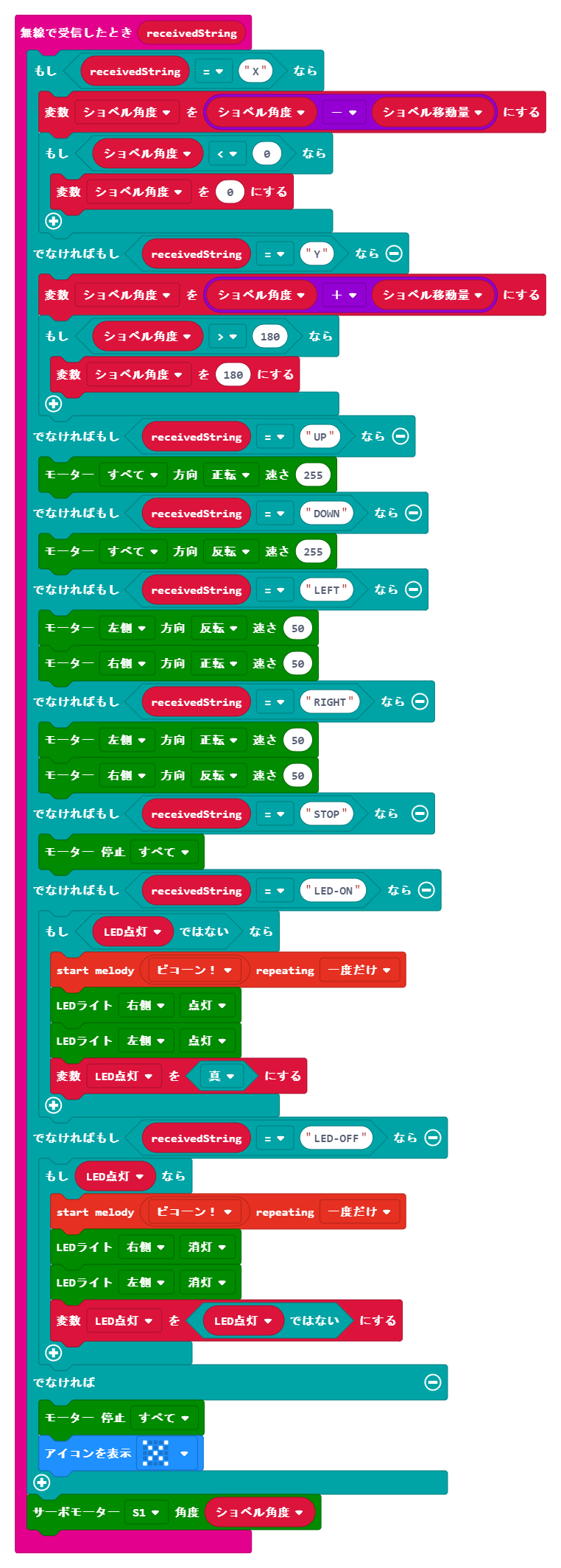
ずっと実行されるプログラム
受信した情報に応じて、前進・後進・左右への回転、ショベル(バケット)の上下、LEDの点灯・消灯を行います。例えば「UP」という文字列を受信したら、すべてのモーターを255という速さで正転させます。マックイーンホイールローダーは前進します。
マックイーンホイールローダー用のサンプルプログラム(JavaScript)です。拡張機能「https://github.com/DFRobot/pxt-maqueen」の追加が必要です。
おすすめ品









