LEGO四脚ロボット(8サーボ型)

micro:bitを使ったプログラミングで、前進・後進・回転などの歩行動作が可能なLEGO四脚ロボット(8サーボ型)です。本記事では、LEGO四脚ロボット(8サーボ型)の組み立て方法を紹介します。
11-7-1.LEGO四脚ロボット(8サーボ型)
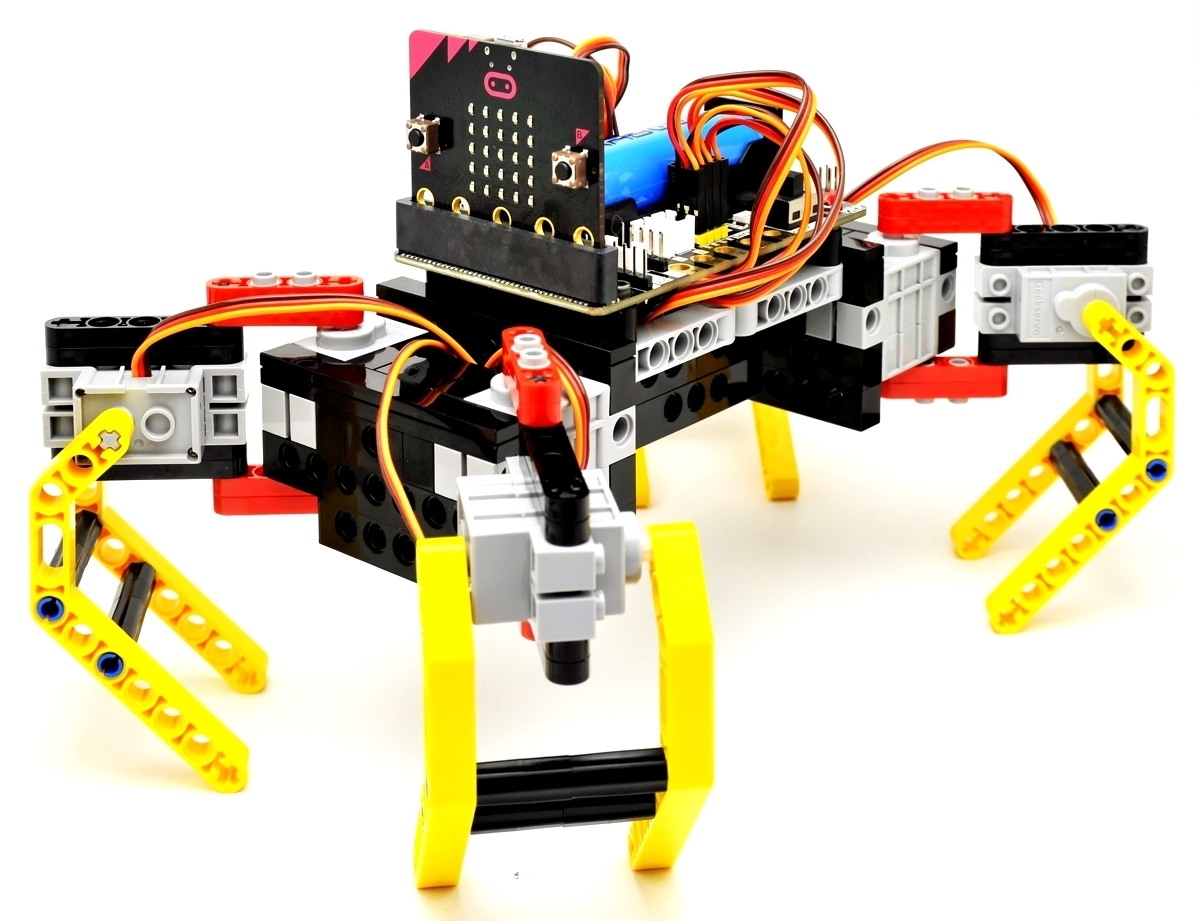
LEGO四脚ロボット(8サーボ型)
LEGO四脚ロボット(8サーボ型)は、多脚ロボットの一つで、四つの脚を使って歩行動作します。一つの脚に、二つの関節があり、それぞれ水平方向への回転と上下の動作を行います。関節の動きは、サーボモーターによって再現され、合計8つのサーボモーターを搭載しています。
四つの脚を制御することで、前後への歩行動作、その場での回転動作などを行うことができます。また、ボディを前後左右へ傾けたり、手(脚?)を振るような動作もプログラミングすることができます。
LEGOテクニック(Technic)ブロック
LEGO四脚ロボット(8サーボ型)は、LEGOブロックを使って組み立てます。一般的な基本ブロックとは異なり、よりメカニカルなモデルを作ることができる「テクニック(Technic)」と呼ばれるブロックを主に使用します。ブロックの総数は、およそ170個です。
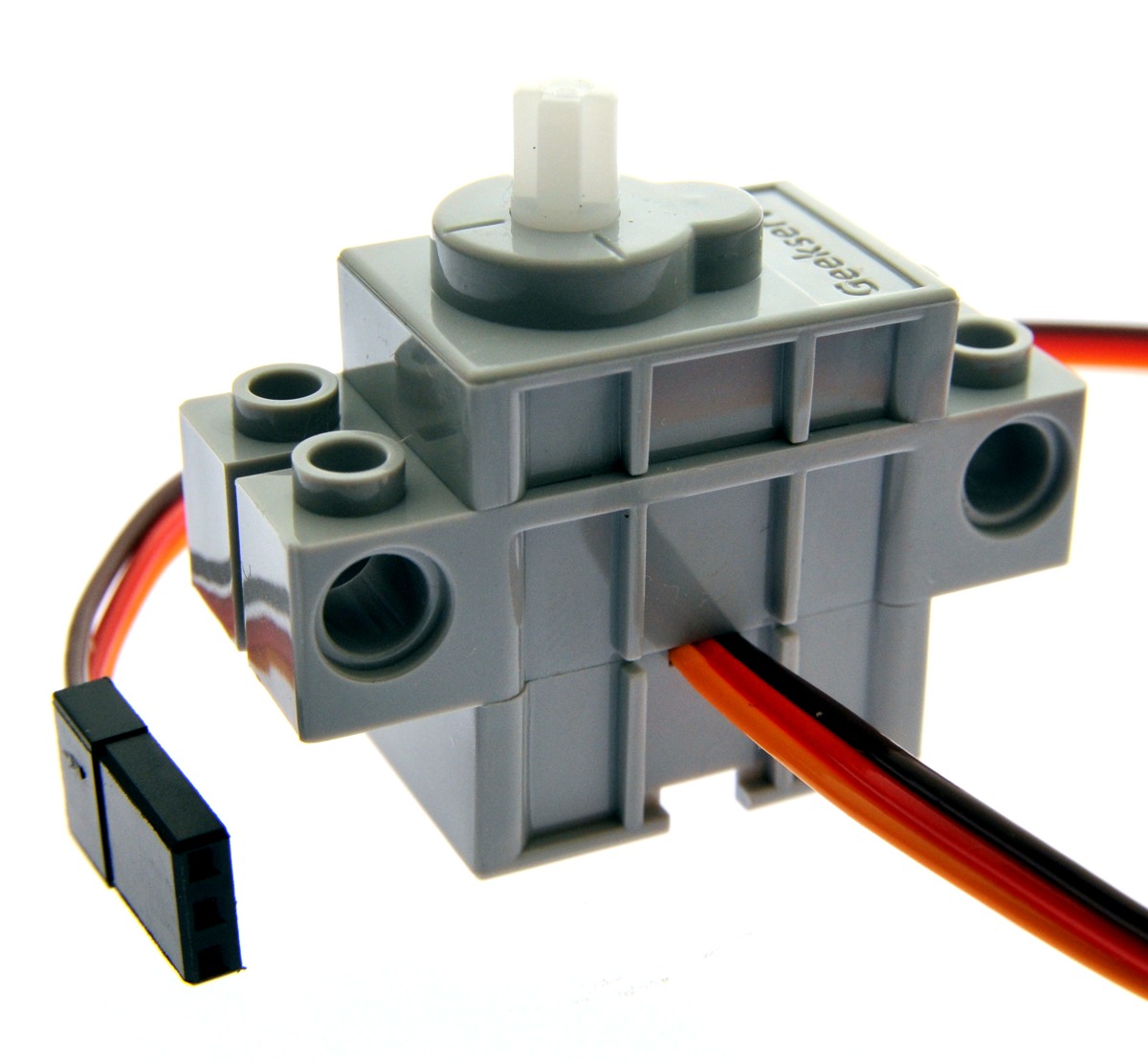
programmable building block servo(Geekservo)
LEGO四脚ロボットの歩行させるために、LEGOに接続可能なサーボモーター(Geekservo)を使用します。角度を指定することによって、出力軸を指定角度まで回転してその位置を保持します。このサーボモーターの可動範囲は、0度~270度です。なお、Geekservoは「11-2.Super:bitに接続できる2種類のモーター」で詳しく紹介しています。

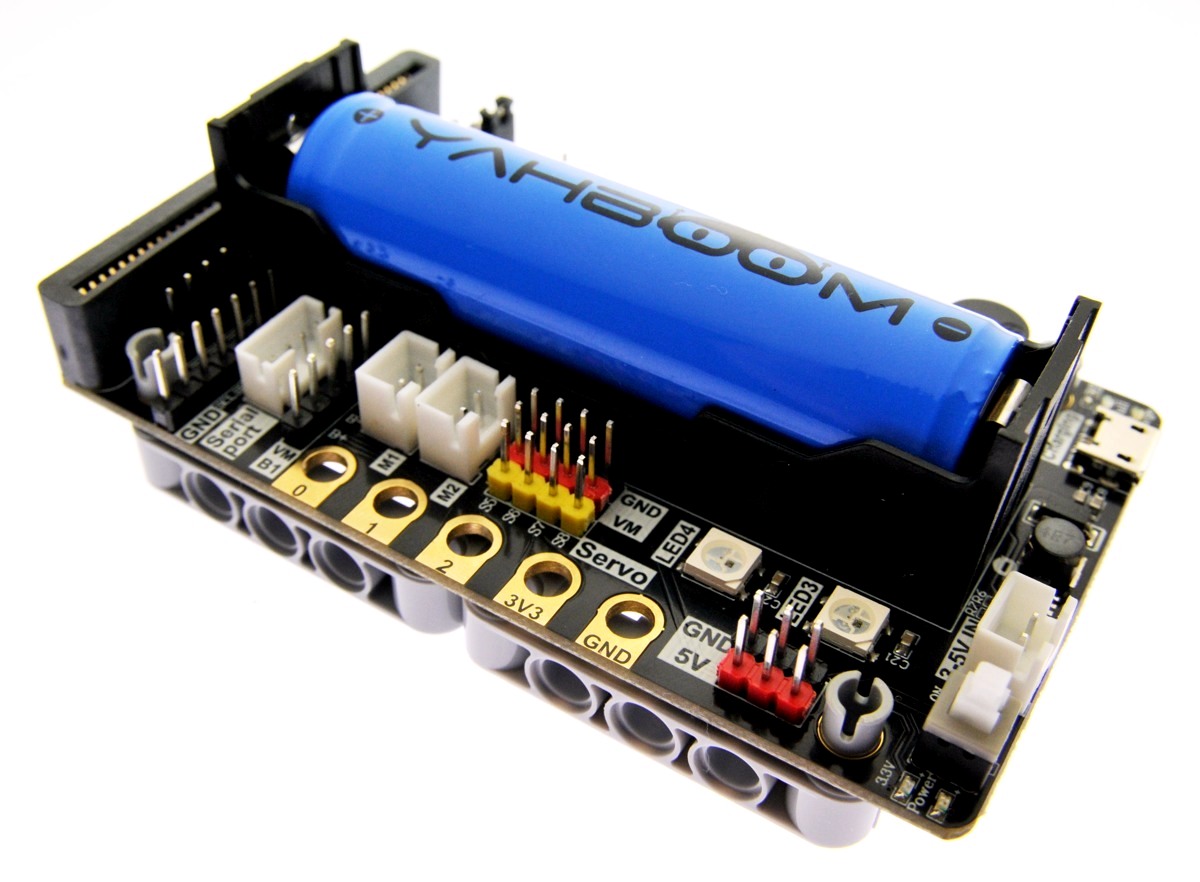
micro:bitと拡張ボード「Super:bit expansion board」
LEGO四脚ロボット(8サーボ型)の制御には、micro:bitと拡張ボード「Super:bit expansion board」を使用します。この拡張ボードは、基板上に18650型充電池を搭載しているので、micro:bitへの給電とサーボモーターを駆動することができます。また、あらかじめLEGO接続用の穴が開いているので、無加工でLEGOに取り付けられます。詳しくは「11-1.Super:bitとLEGOを接続する」で紹介しています。
脚の動き
図11-7-1-4は、LEGO四脚ロボット(8サーボ型)の初期状態です。
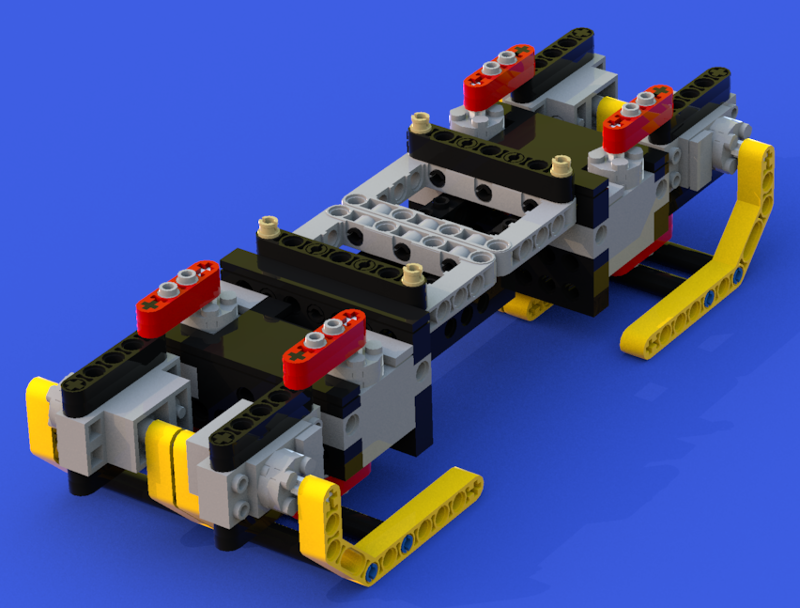
図11-7-1-5は、黄色のパーツを90度回転させて、立ち上がった状態(閉脚)です。
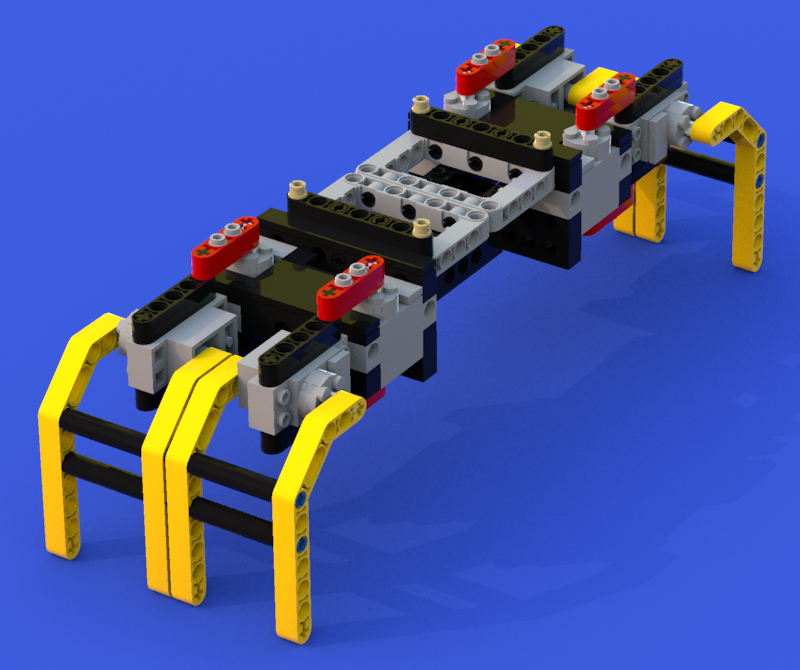
図11-7-1-6は、さらに脚全体を水平方向へ90度回転させた状態(開脚)です。
11-7-2.準備するパーツ
LEGO四脚ロボット(8サーボ型)
LEGO四脚ロボット(8サーボ型)の組み立てに必要なLEGOブロックのパーツとサーボモーター(8個)です。この他に、micro:bitと拡張ボード「Super:bit expansion board」を用意します。
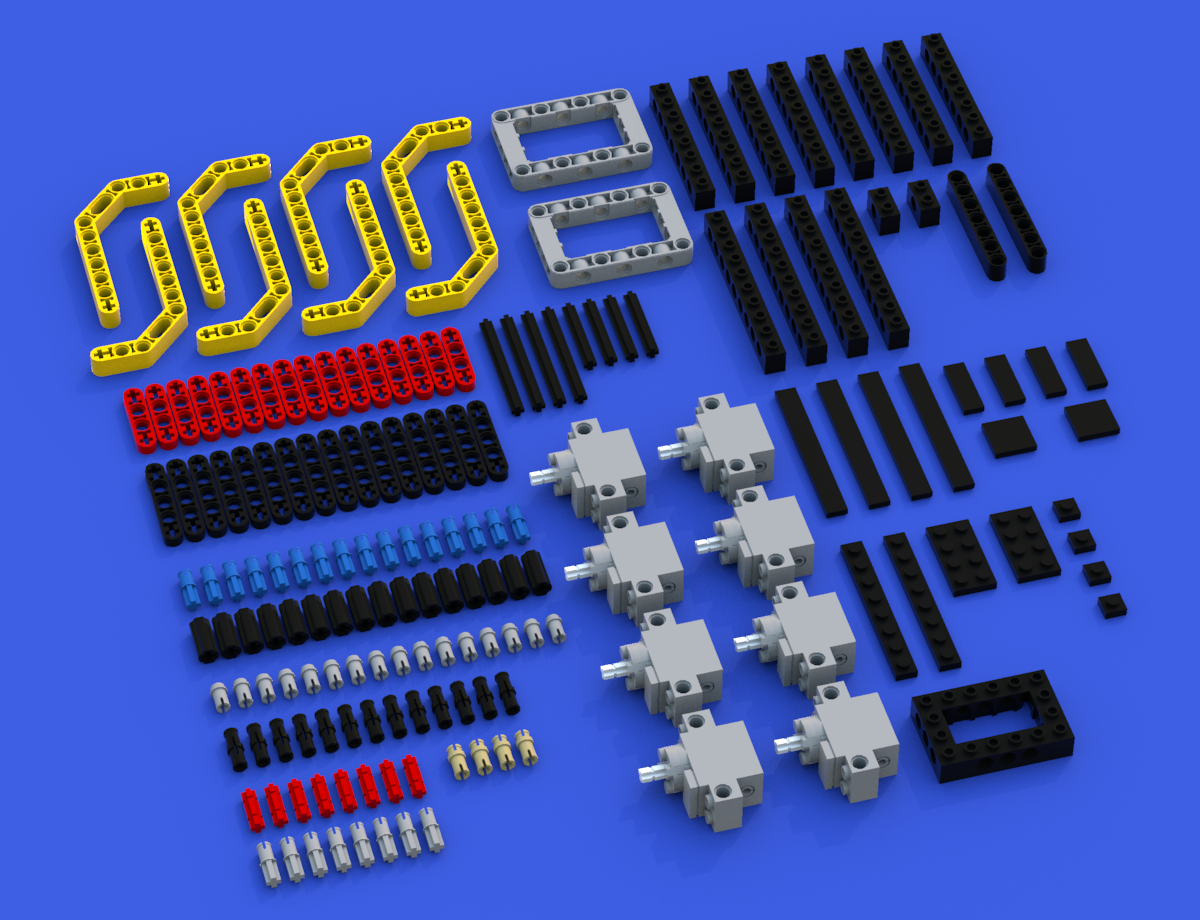
LEGOブロックのパーツリストです。
| エレメントID | パーツ名(カラー) | 個数 |
|---|---|---|
| 4111996 | リフトアーム 1x11.5 ダブルベント(イエロー) | 8 |
| 4539880 | リフトアーム 5x7 オープンセンター(グレー) | 2 |
| 4141811 | リフトアーム 1x4 - 薄型(レッド) | 16 |
| 6030286 | リフトアーム 1x5 - 薄型 十字穴(ブラック) | 16 |
| 4206482 | 軸 - コネクターペグ(ブルー) | 16 |
| 4512363 | 軸コネクター(ブラック) | 16 |
| 4211483 | 1/2 コネクターペグ スタッド(グレー) | 16 |
| 4121715 | コネクターペグ 滑り止め(ブラック) | 13 |
| 4142865 | 2M 十字軸 15mm(レッド) | 8 |
| 6013938 | ピン 3/4(タン) | 4 |
| 4666579 | 軸 - コネクターペグ(タン) | 8 |
| 370526 | 4M 十字軸 31mm(ブラック) | 4 |
| 370626 | 6M 十字軸 47mm(ブラック) | 4 |
| 370026 | ブロック 1x2 - ピン穴1(ブラック) | 2 |
| 370226 | ブロック 1x8 - ピン穴7(ブラック) | 8 |
| 273026 | ブロック 1x10 - ピン穴9(ブラック) | 4 |
| 4495935 | リフトアーム 1x7(ブラック) | 2 |
| 4144025 | 枠ブロック 4x6(ブラック) | 1 |
| 346026 | プレート 1x8(ブラック) | 2 |
| 302426 | プレート 1x1(ブラック) | 4 |
| 302026 | プレート 2x4(ブラック) | 2 |
| 416226 | タイル 1x8(ブラック) | 4 |
| 4558170 | タイル 1x3(ブラック) | 4 |
| 306826 | タイル 2x2(ブラック) | 2 |
11-7-3.組み立て手順
シャーシの組み立て
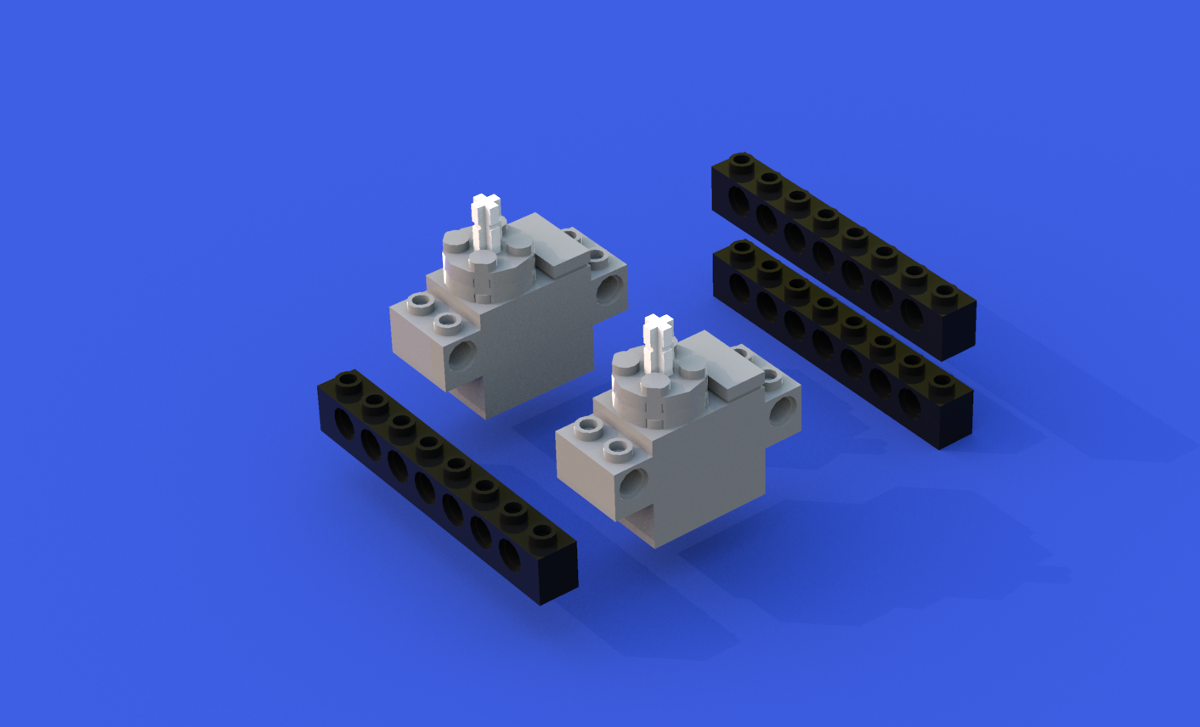
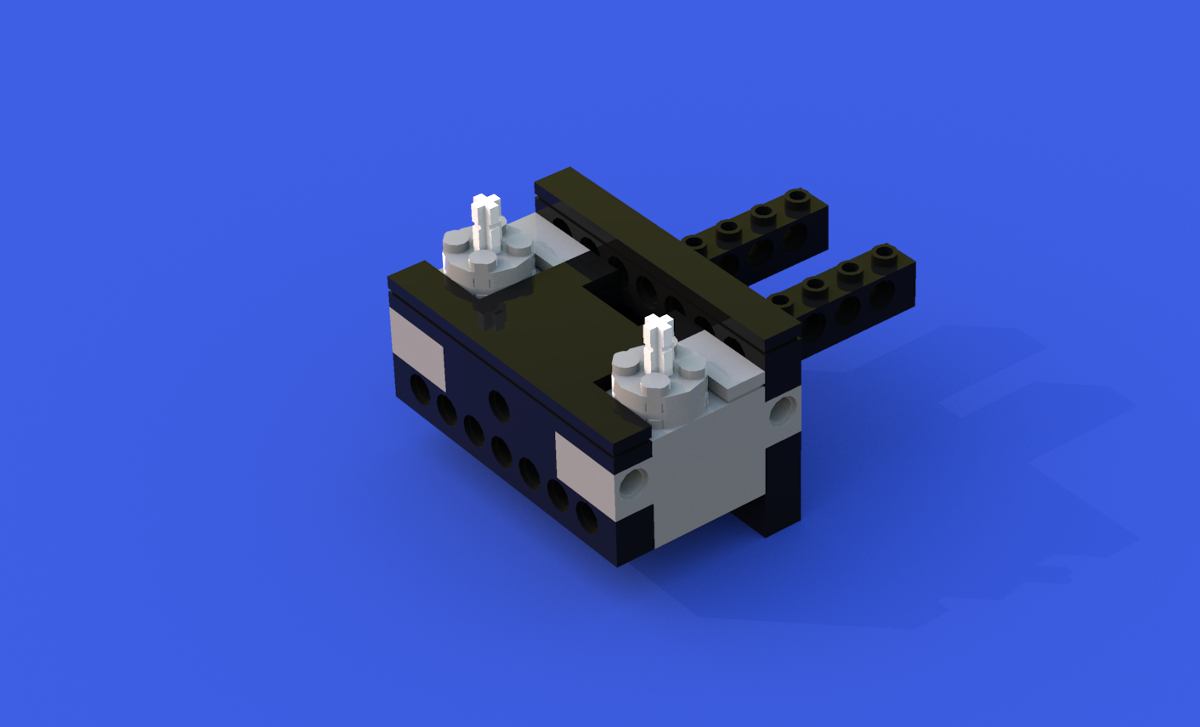
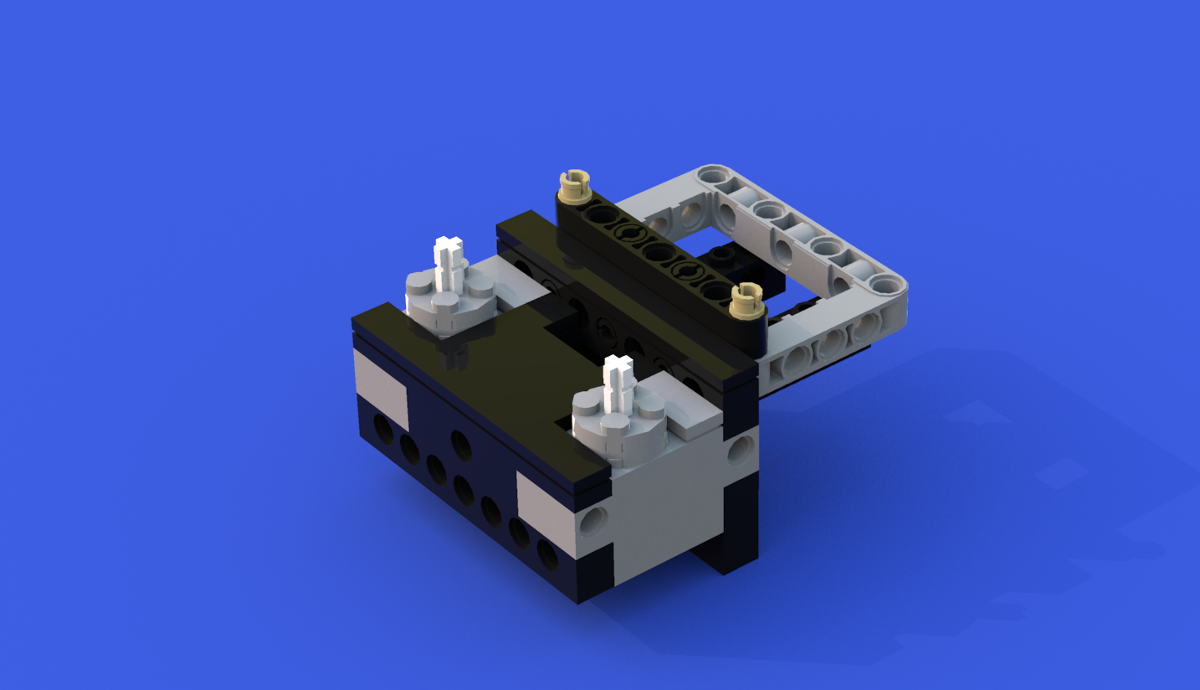
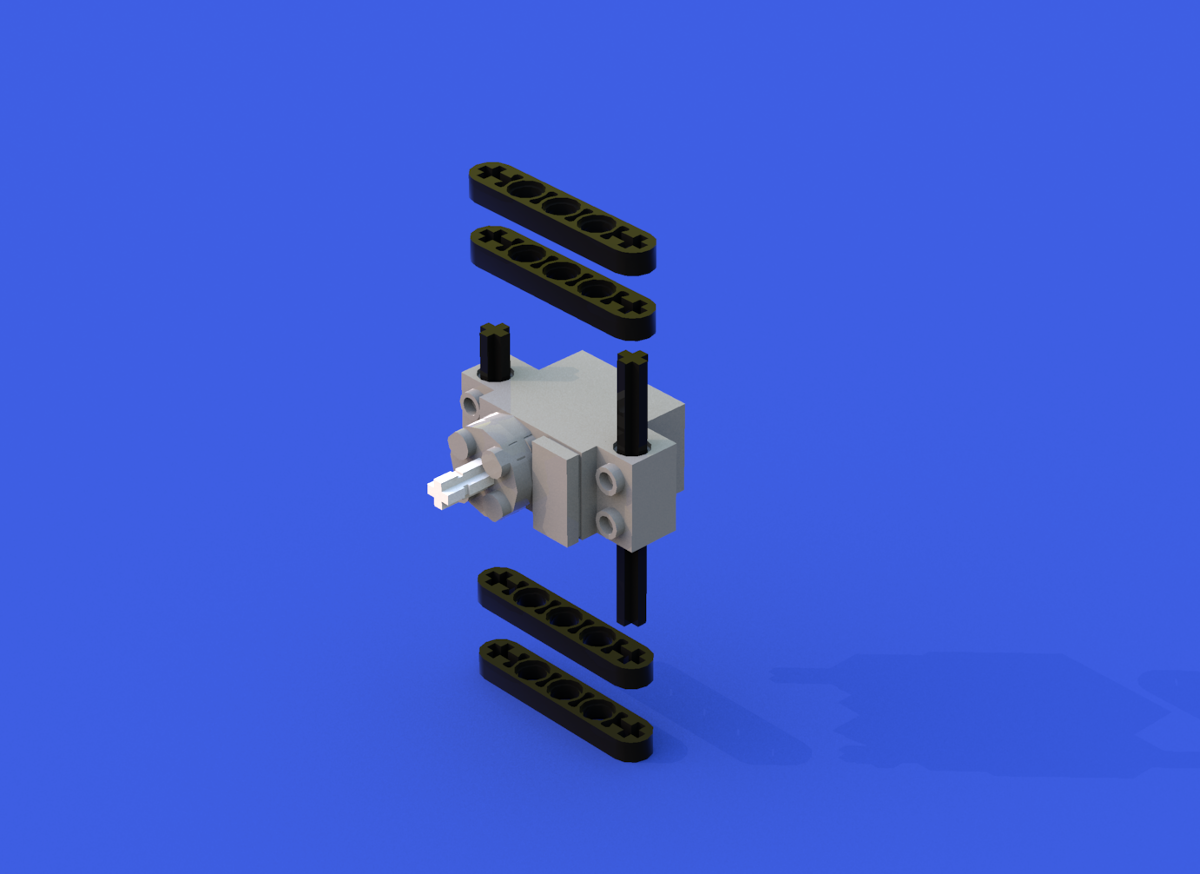
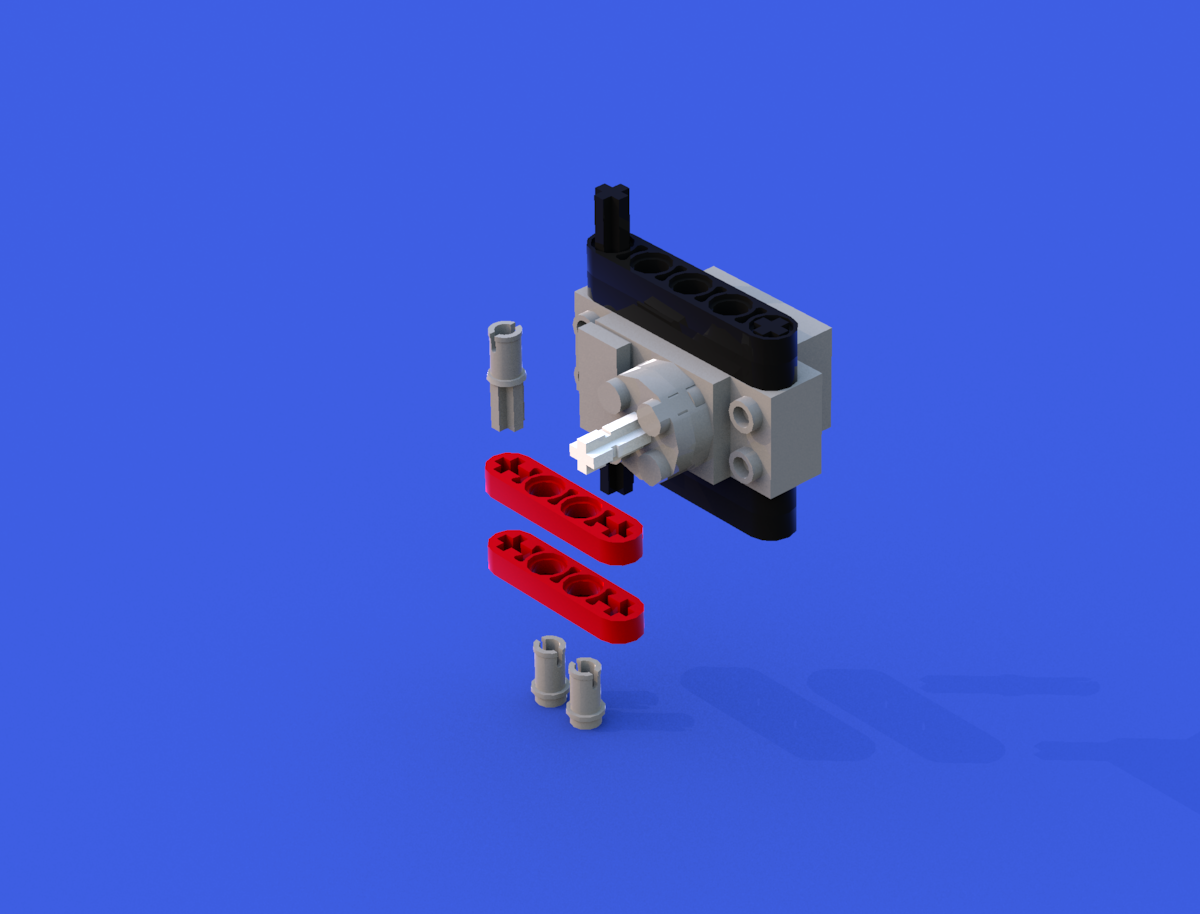
第一関節となるサーボモーターを固定、および拡張ボードを取り付けるためのシャーシを組み立てます。まず、サーボモーター2個を固定して、第一関節部を組み立てます。
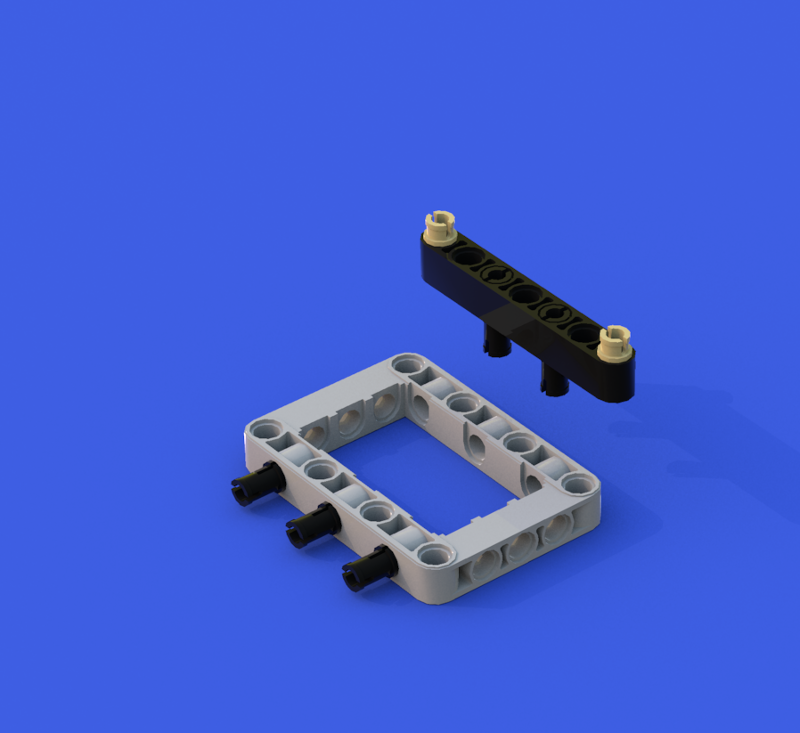
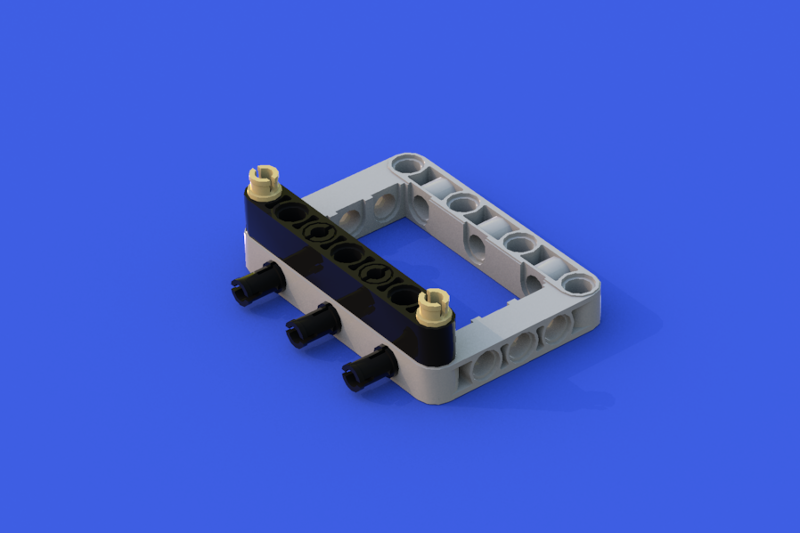
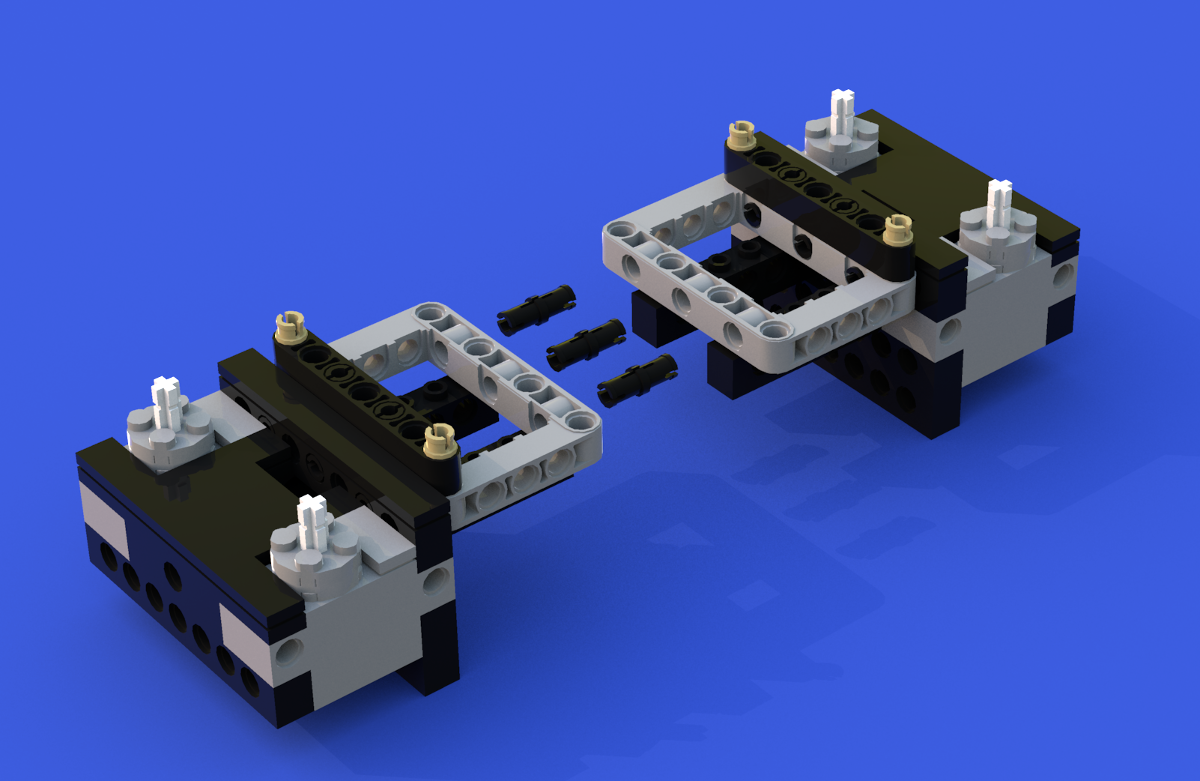
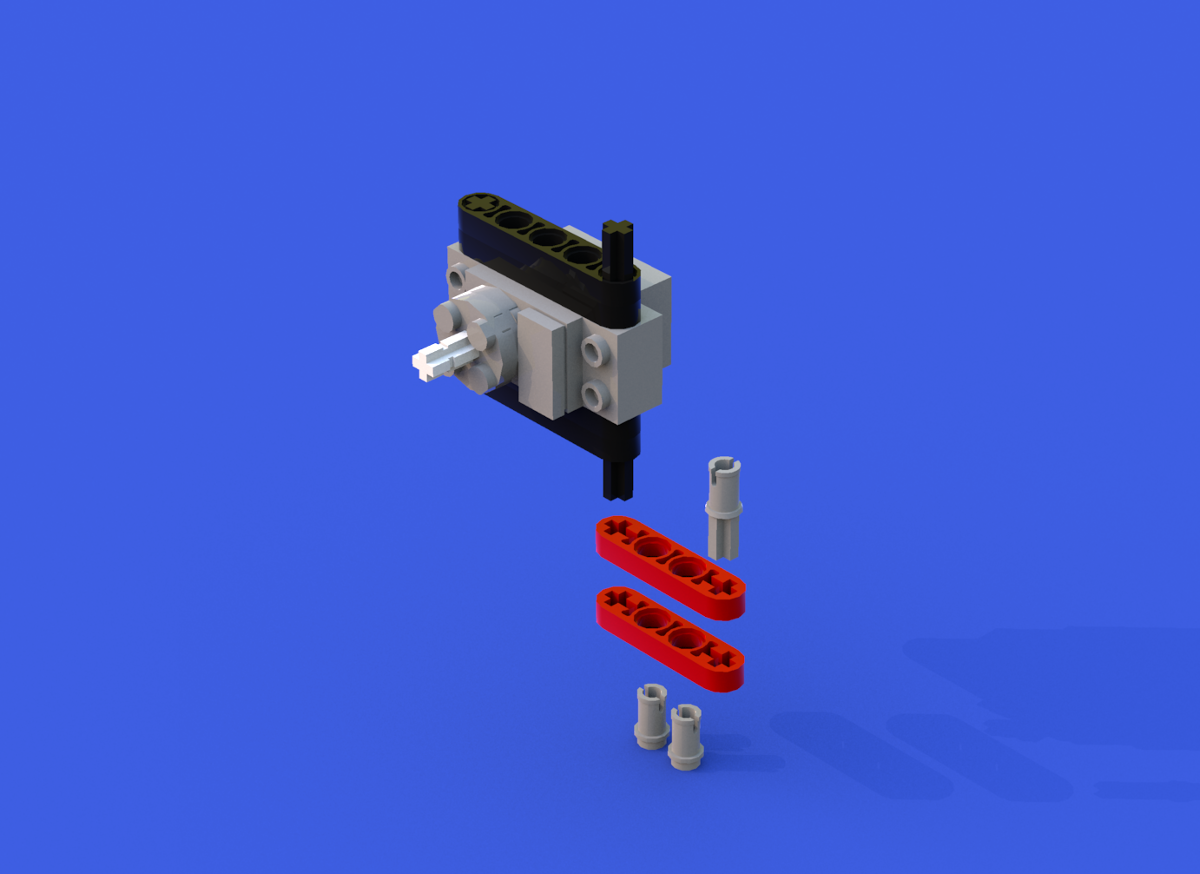
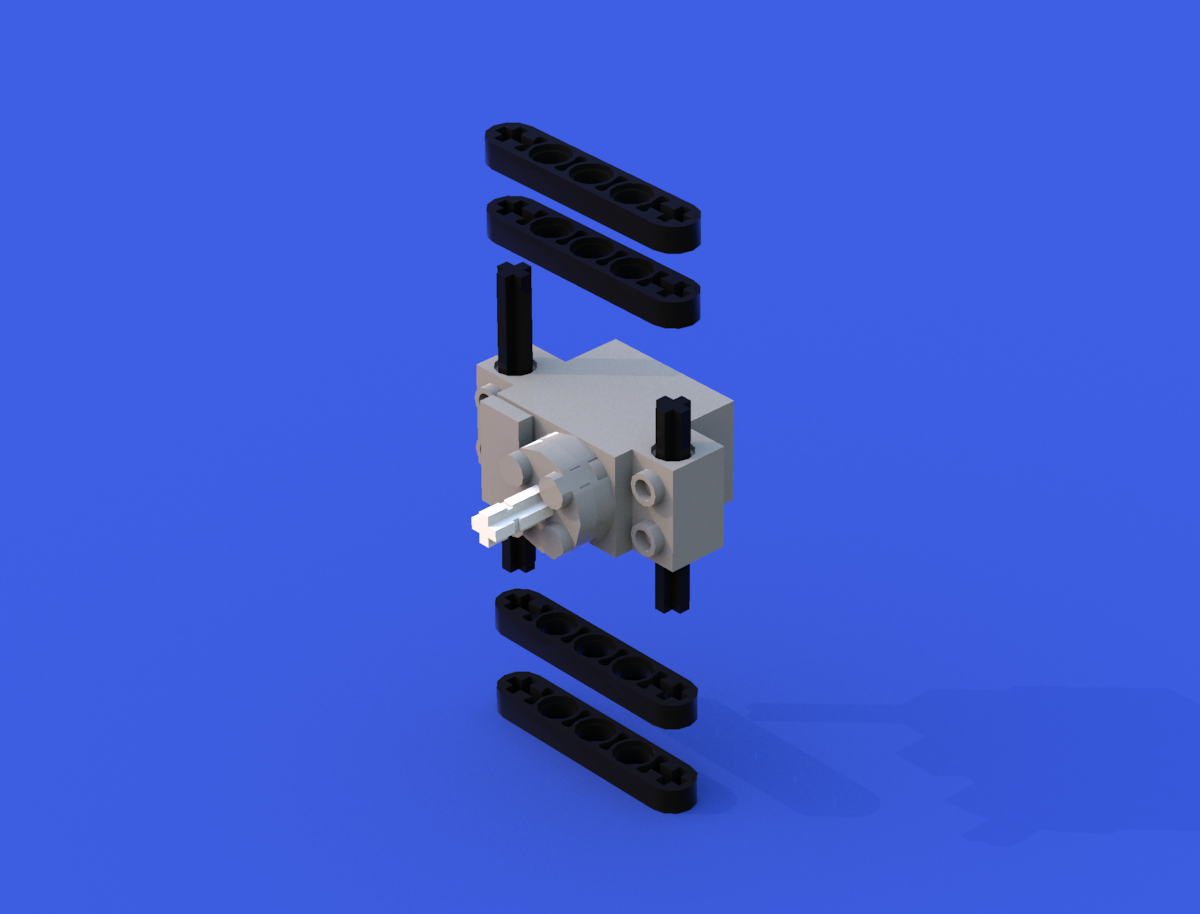
次に、拡張ボードの取り付け部を組み立てます。

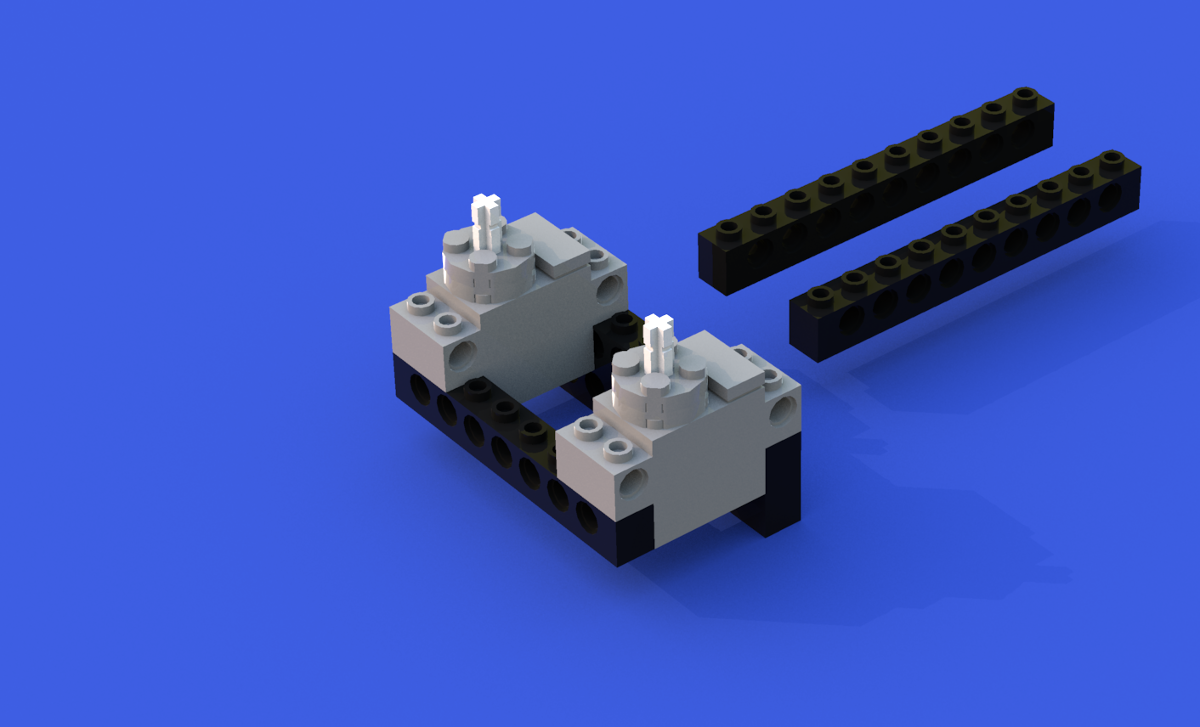
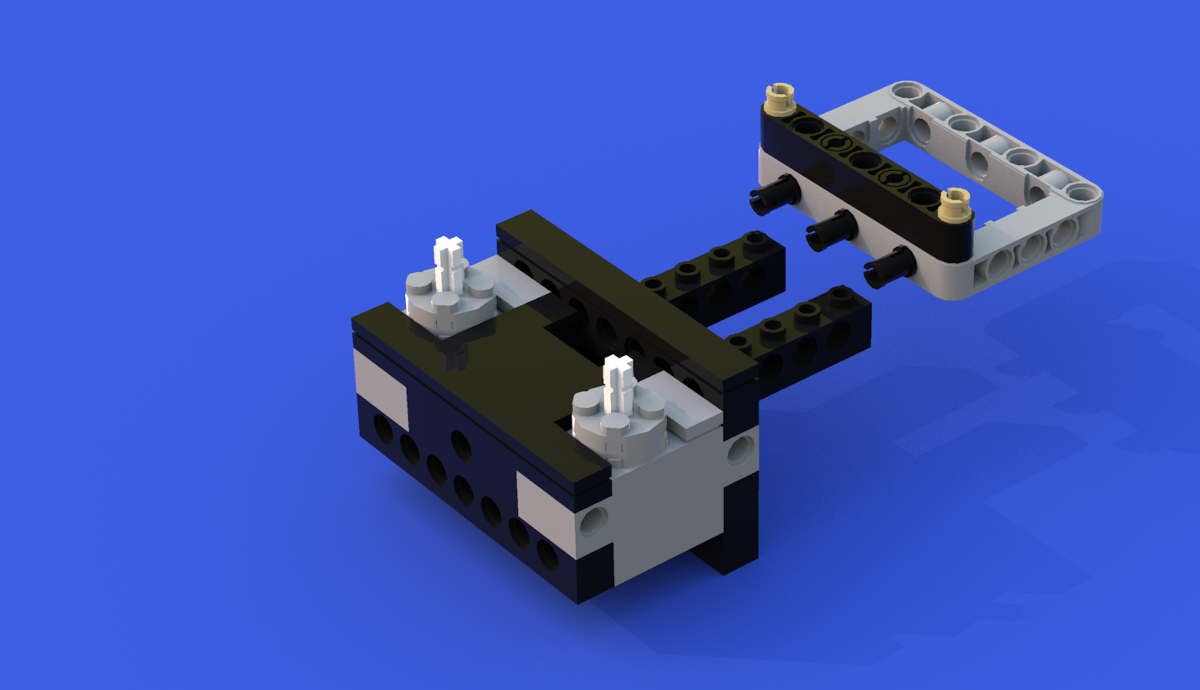
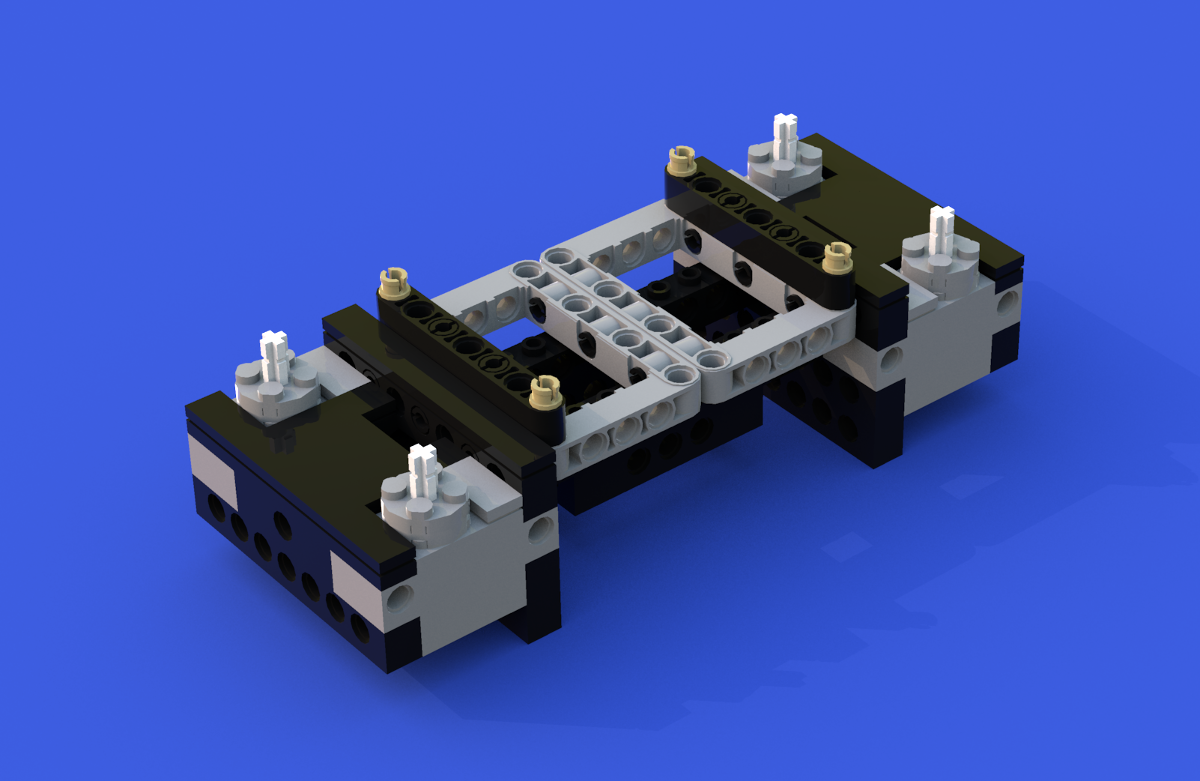
第一関節部と拡張ボードの取り付け部を組み合わせます。
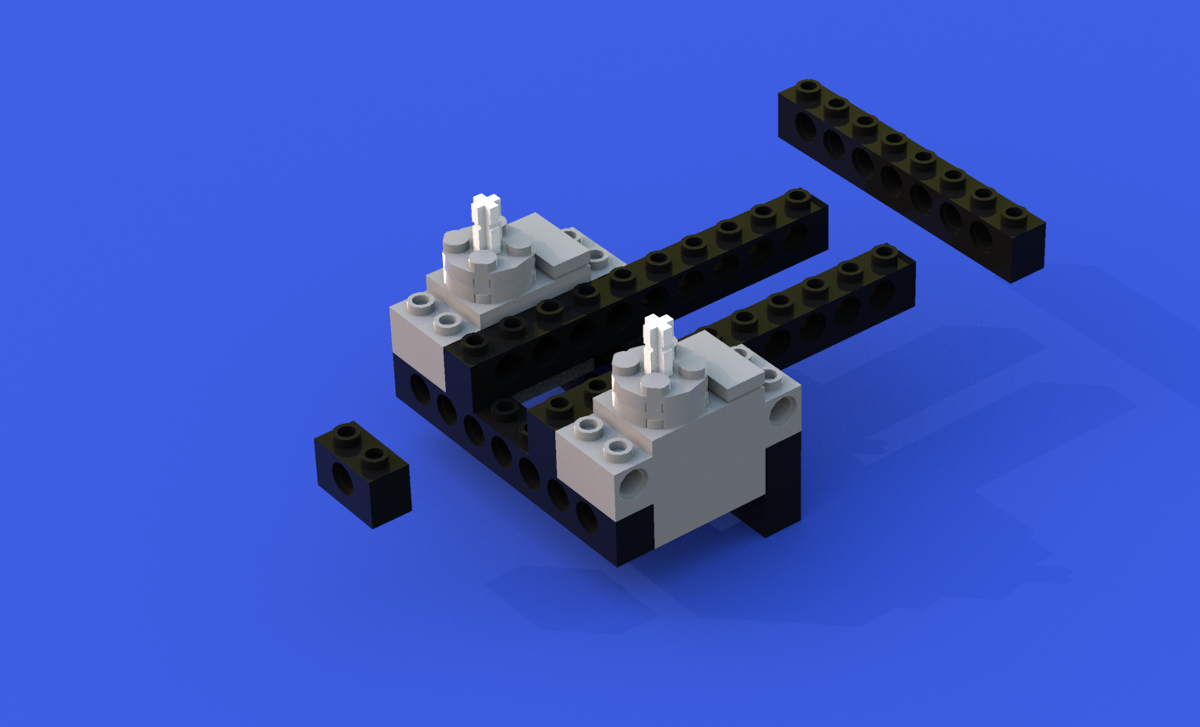
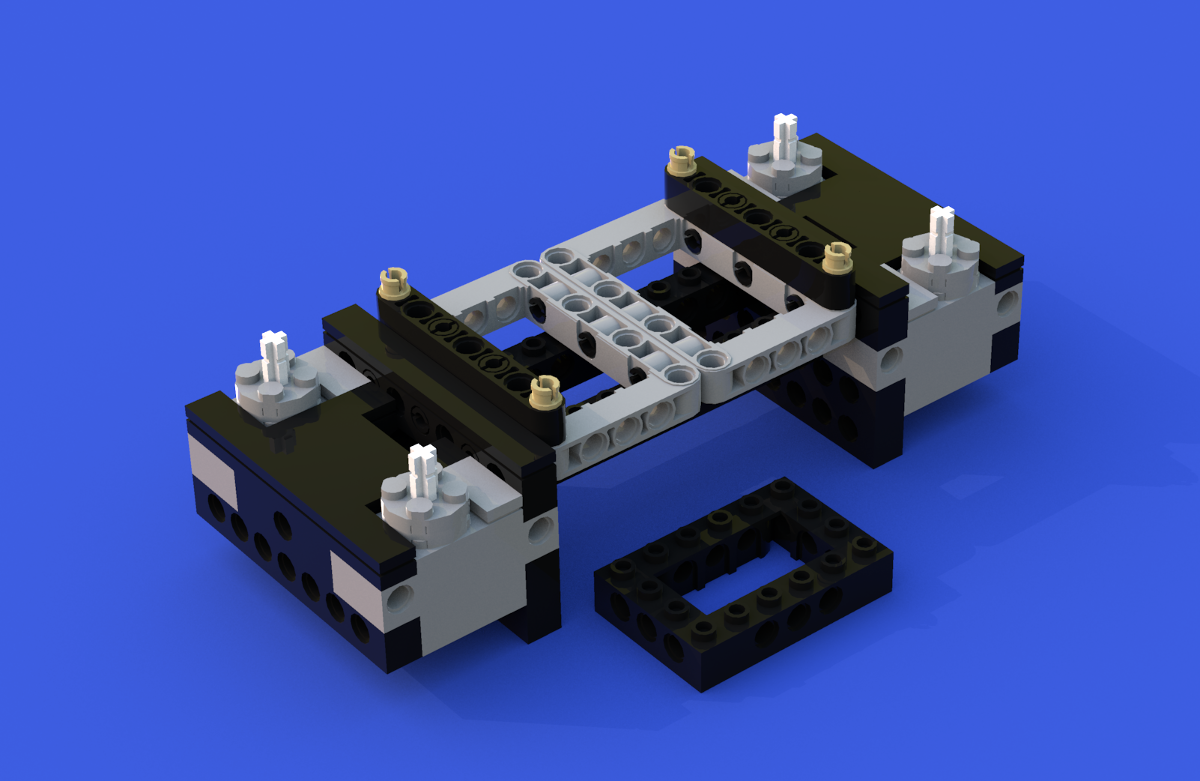
同じものをもう一つ組み立てて、図のように組み合わせます。
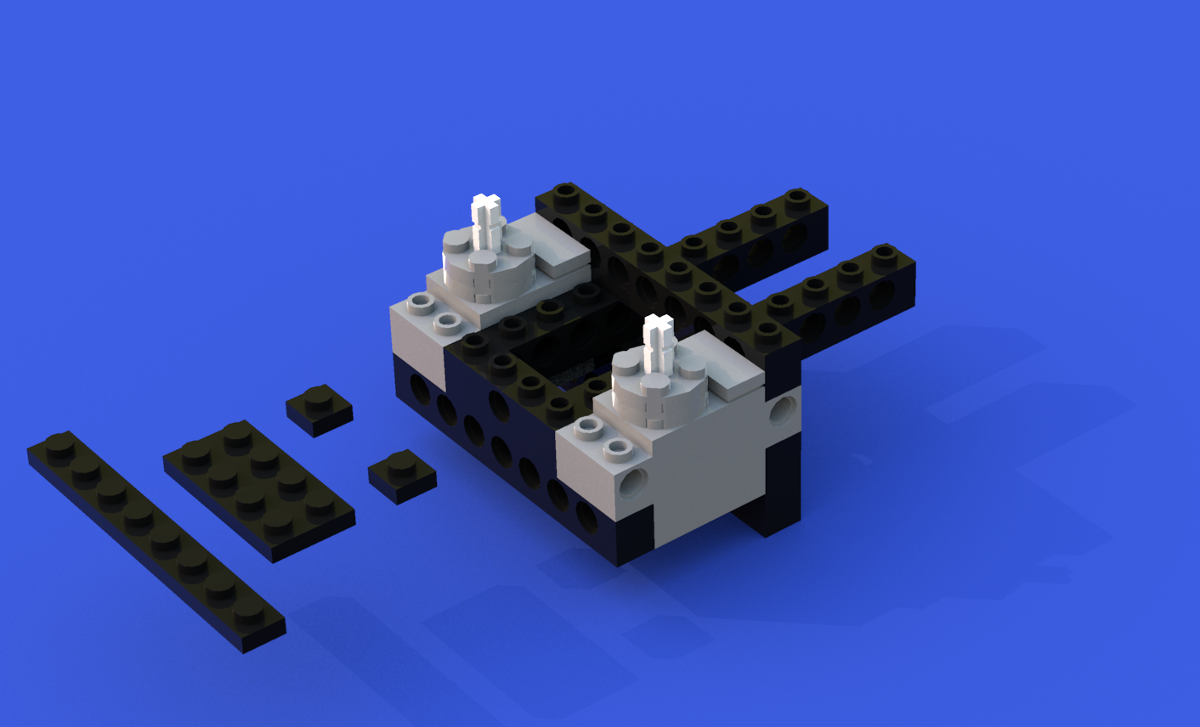
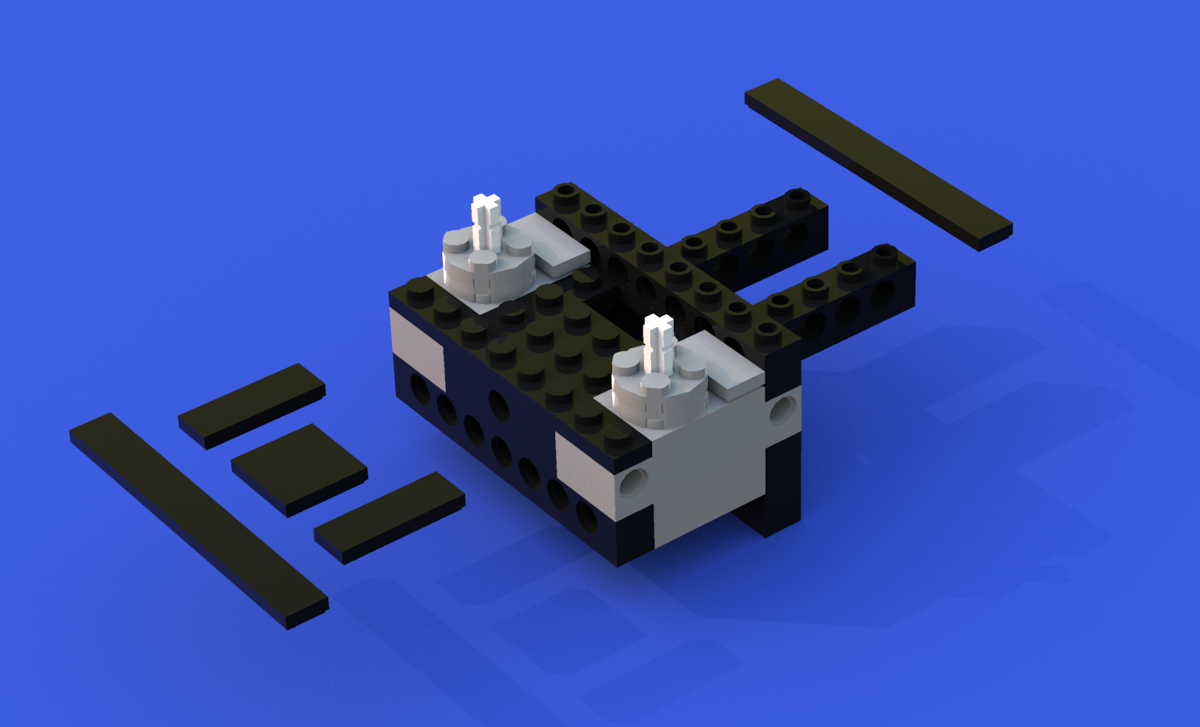
補強のブロックを、底面に取り付けます。
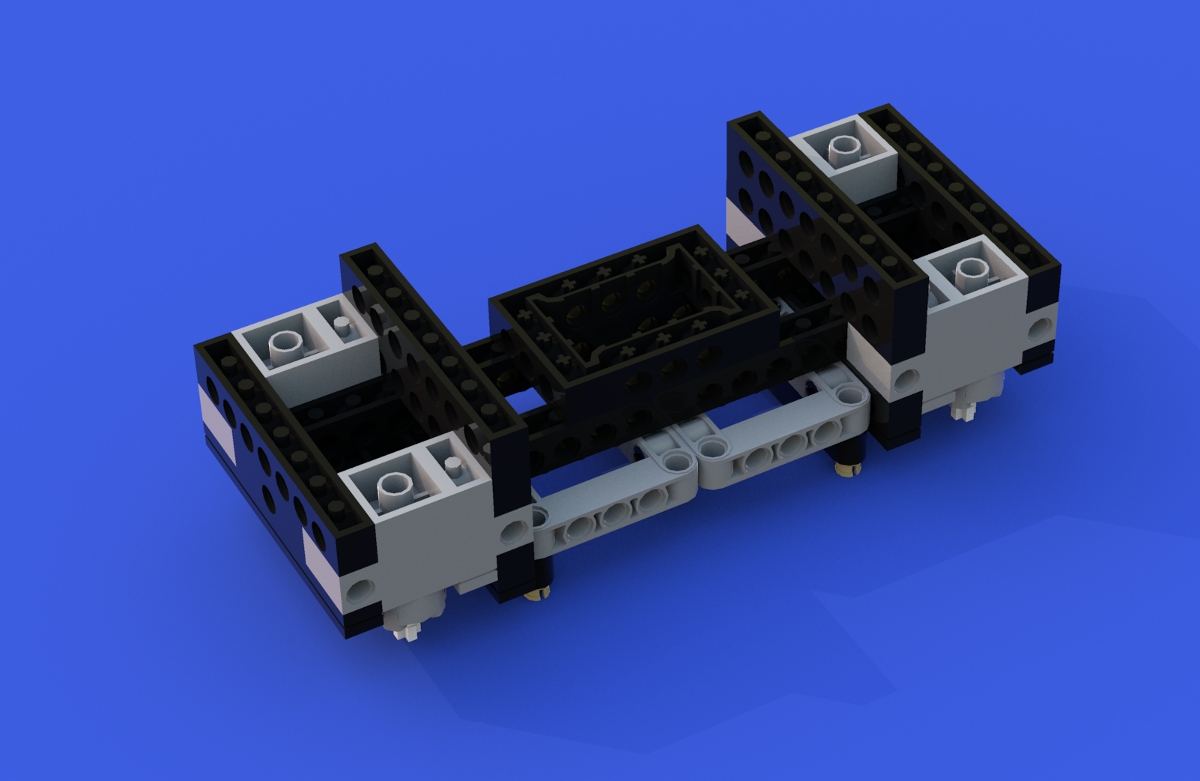
シャーシの完成です。
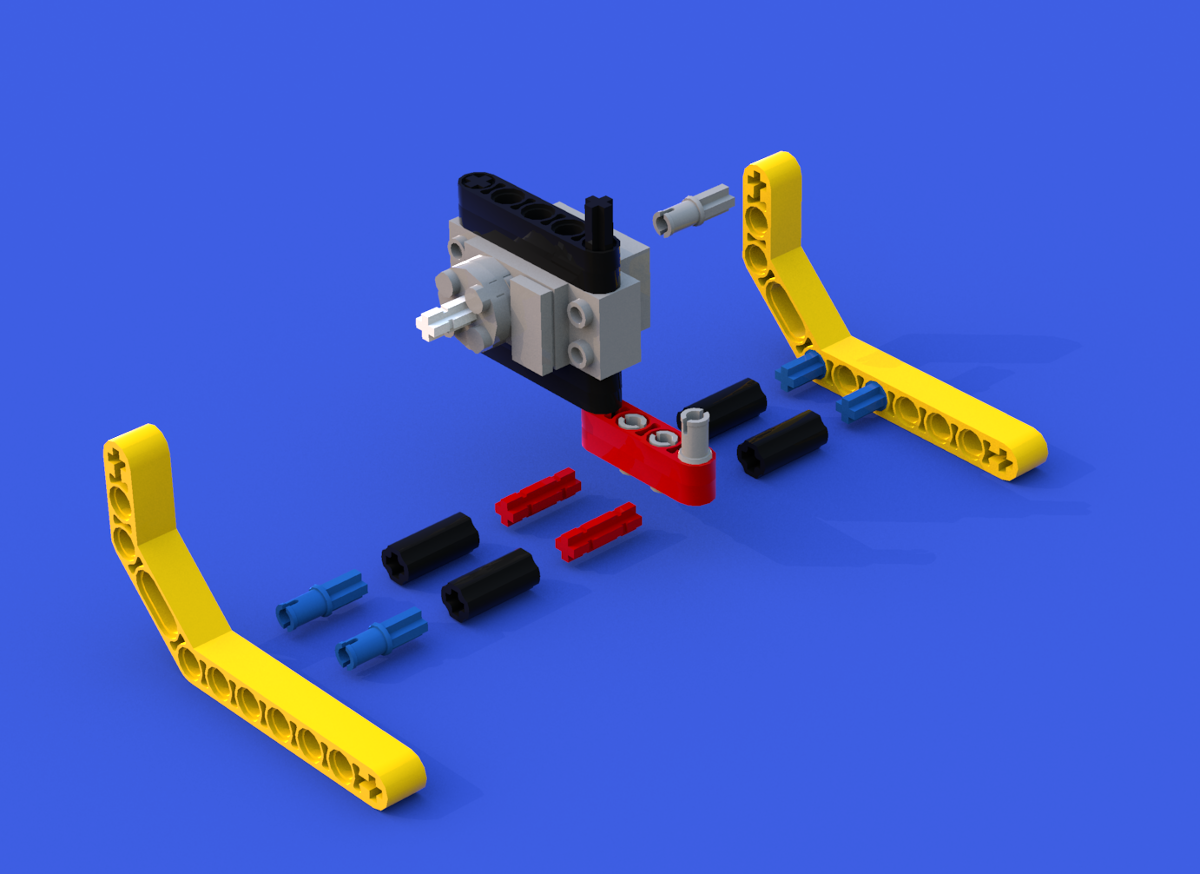
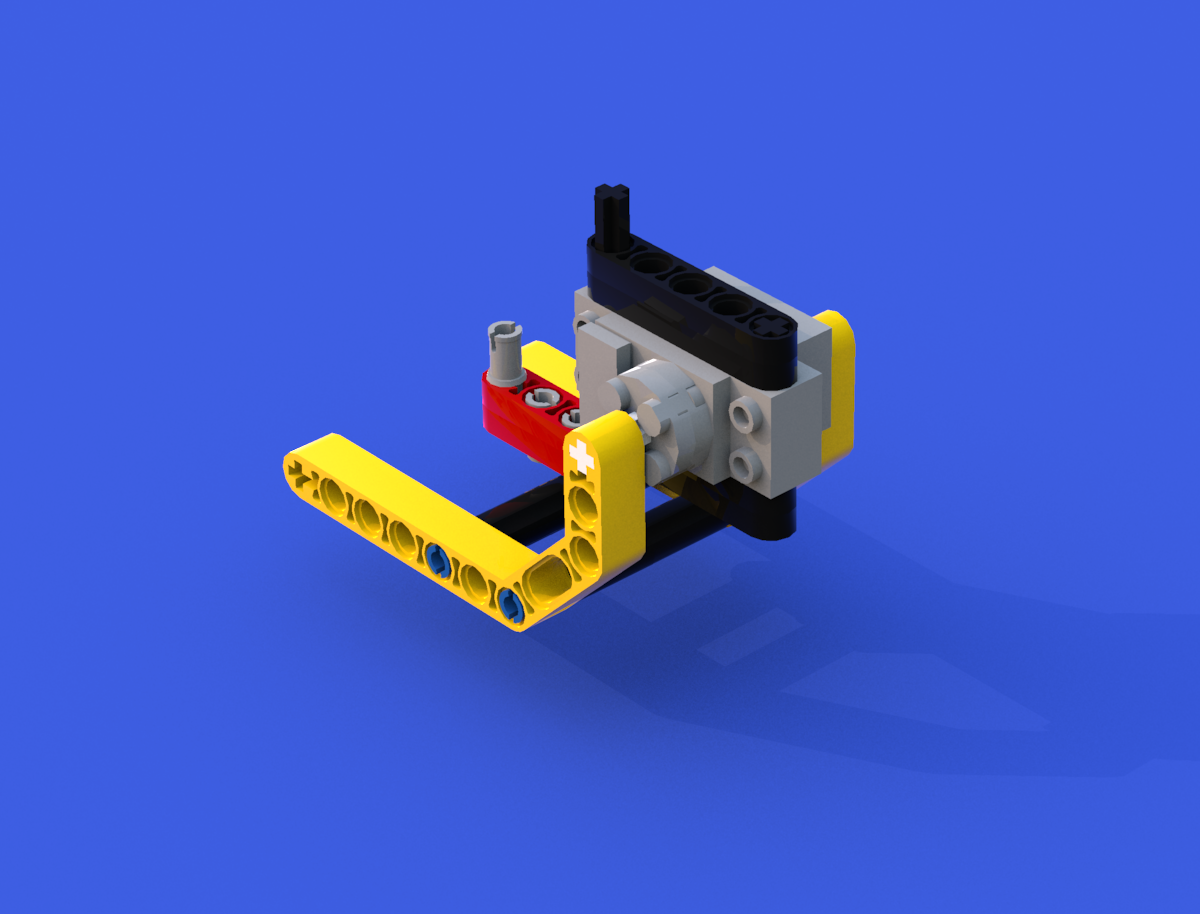
脚(タイプL)の組み立て
第二関節となるサーボモーターを中心に、脚を組み立てます。脚には、サーボモーターの向きが異なるタイプLとタイプRの2種類があります。まず、タイプLの脚を組み立てます。
脚(タイプR)の組み立て
次に、タイプRの脚を組み立てます。
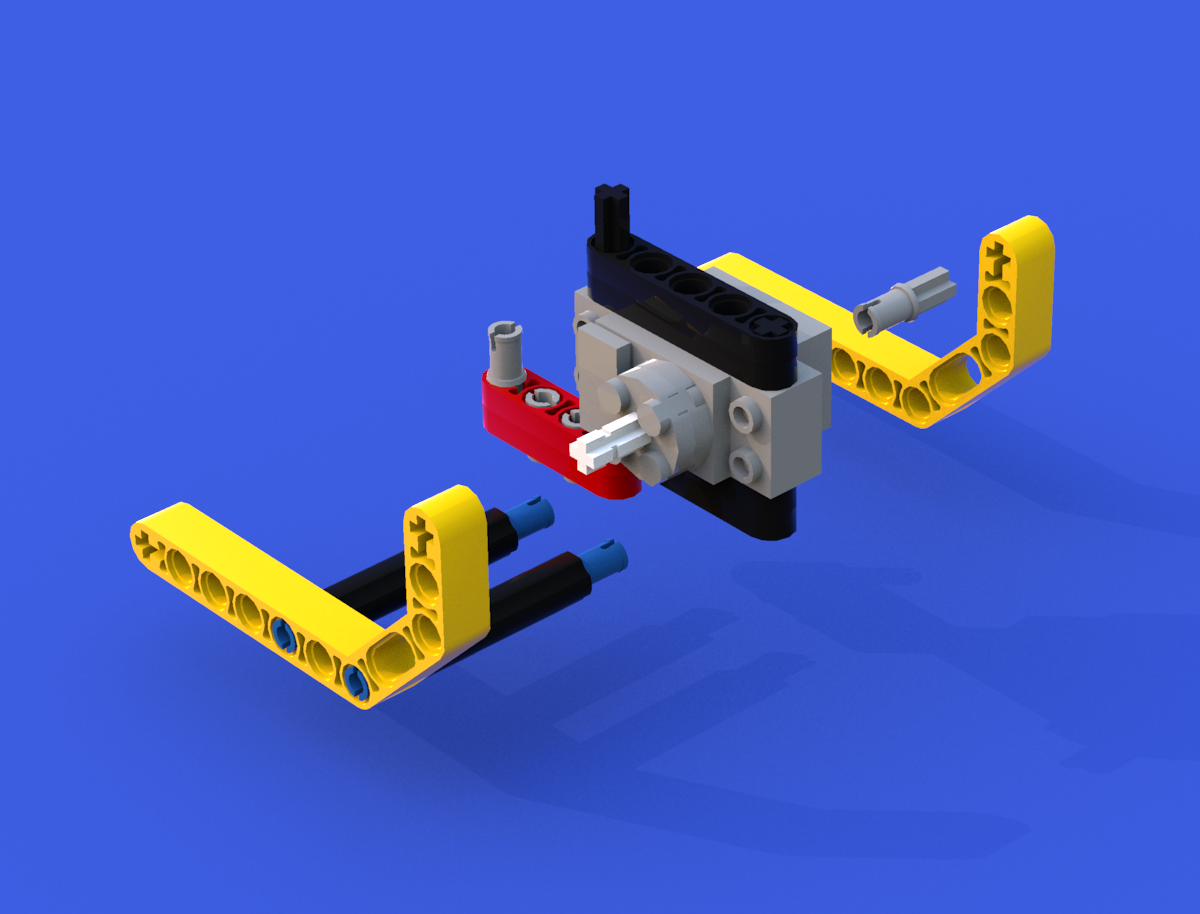
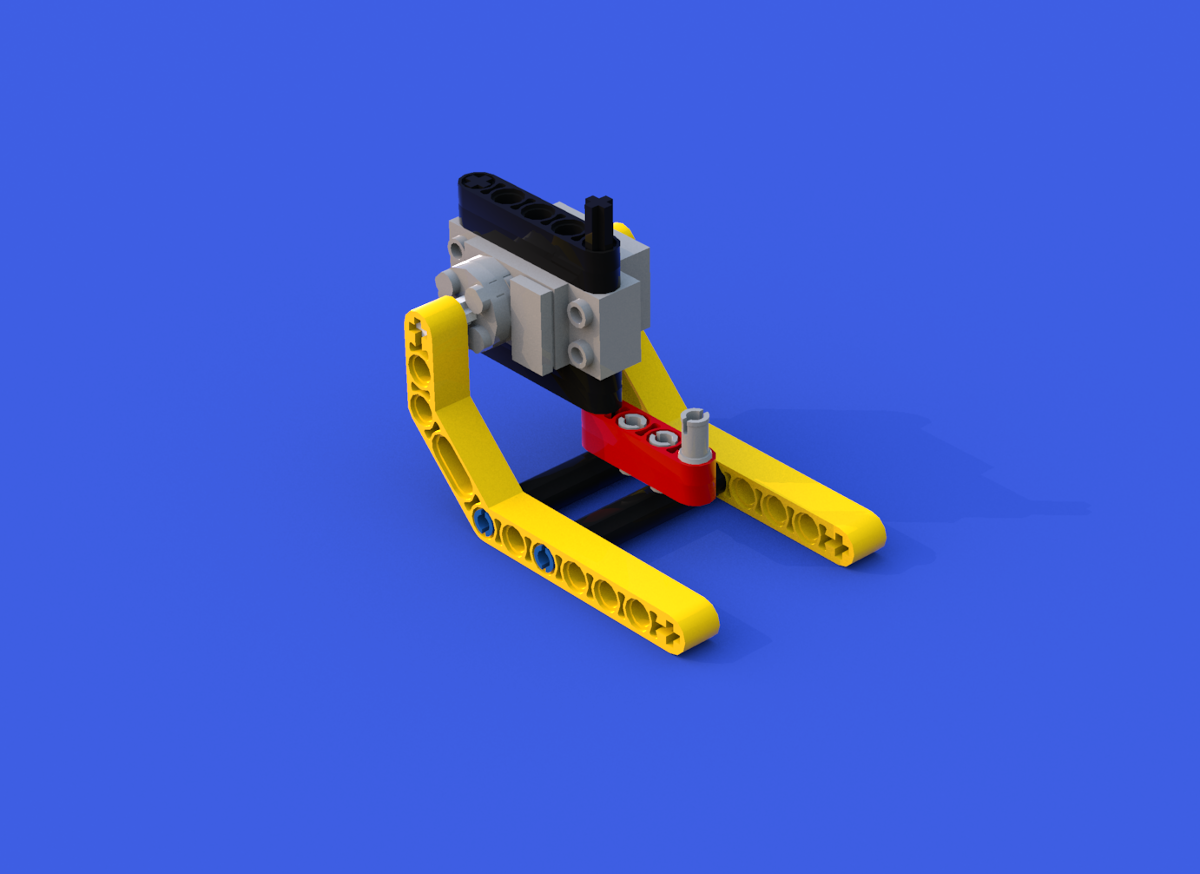
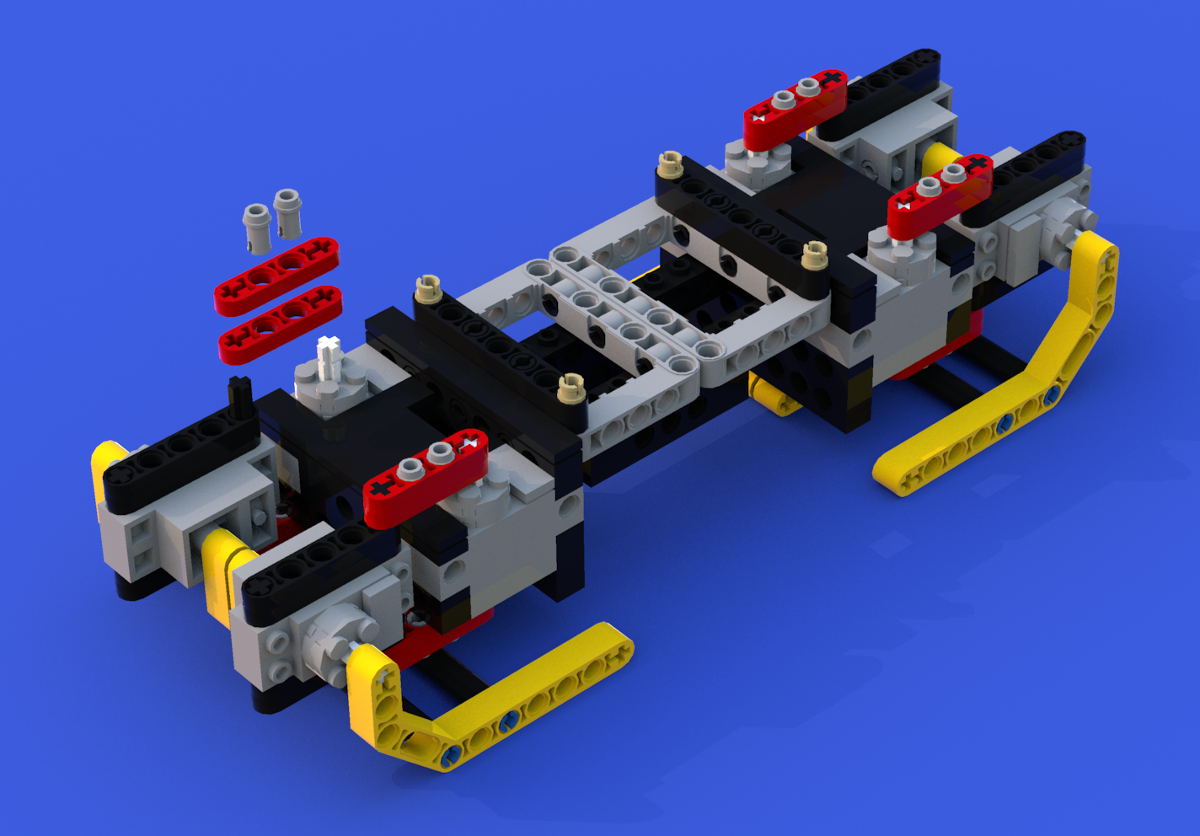
脚の取り付け
タイプL・タイプRの脚を、二組ずつ組み立てて、第二関節のサーボモーターの出力軸(白い十字軸)が外側へ向くように取り付けます。
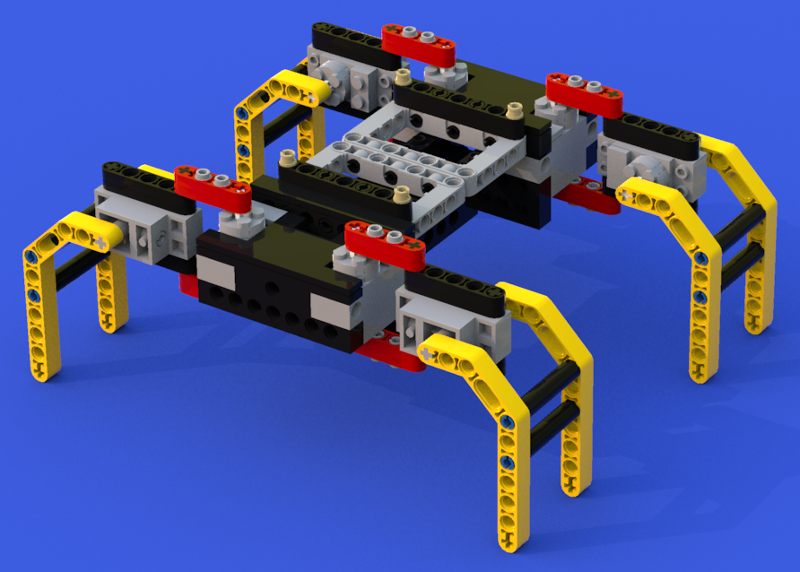
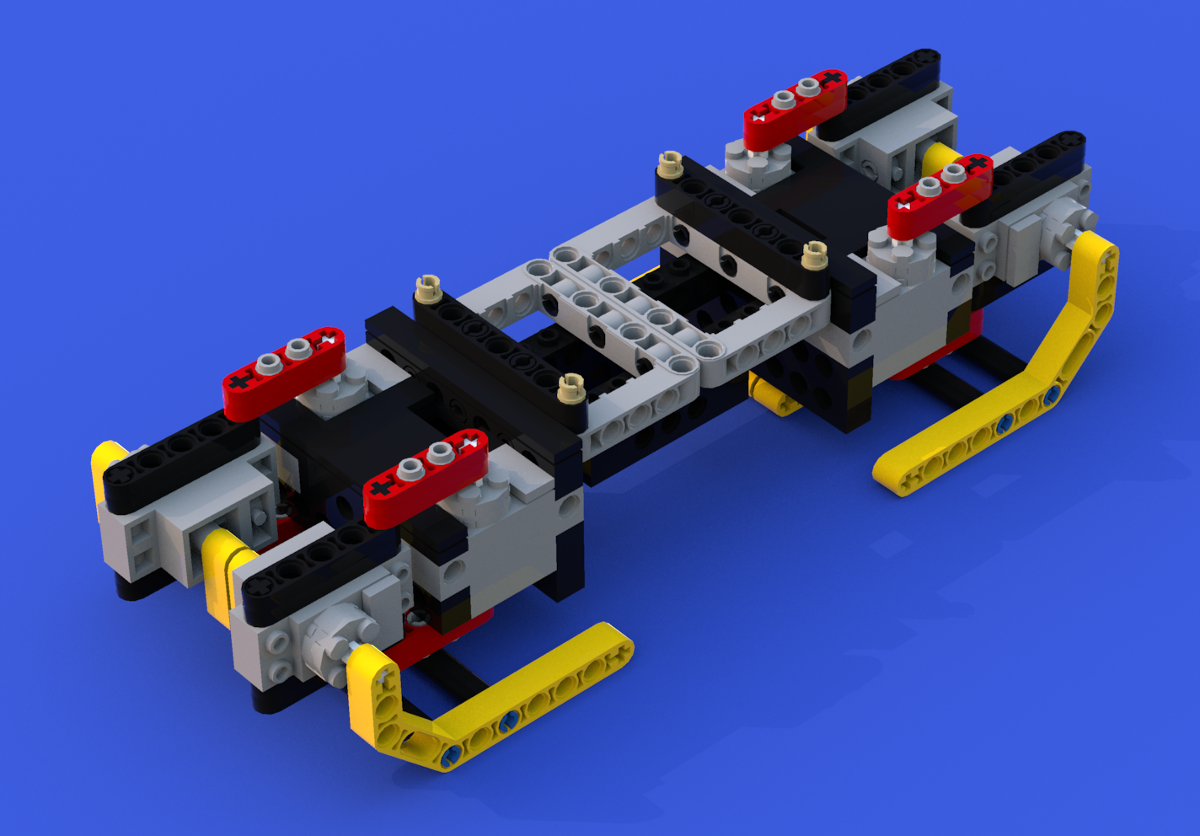
完成したLEGO四脚ロボット(8サーボ型)
完成したLEGO四脚ロボット(8サーボ型)です。
おすすめ品




レゴブースト クリエイティブ・ボックス
5種類の中から好きなものを組み立て、簡単なコードでタブレットを使いコントロールしよう!Bluetoothがついたレゴムーブハブ、相互に作用し合うモーターと色&距離センサーが含まれています。



The LEGO Technic Idea Book: Wheeled Wonders
テクニックシリーズのパーツを使った車・トラック・オートバイなどの作品を収録したペーパーブックです。










