micro:Maqueen V3.0

独立した二つの駆動輪を持つSTEM教育用のグラフィカルプログラミングロボット「micro:Maqueen V3.0」を紹介します。
この記事で紹介しているmicro:MaqueenのバージョンはV3.0です。micro:Maqueen V4.0の紹介は「付録3-24.micro:Maqueen V4.0」をご覧ください。
1.micro:Maqueen V3.0の紹介
DFROBOTのmicro:Maqueen V3.0(マイクロマックイーン V3.0)は、独立した二つの駆動輪を持つSTEM教育用のグラフィカルプログラミングロボットです。別売りのmicro:bitを搭載することで、駆動輪などをプログラミングで制御することができます。
電源電圧は3.5V~5Vで、通常は単四型乾電池×3本を使用します。また、オプションの電源管理モジュール(リチウムイオン電池ホルダー)を取り付けることで、充電式のリチウムイオン電池(RCR123A)×1本で動作します。

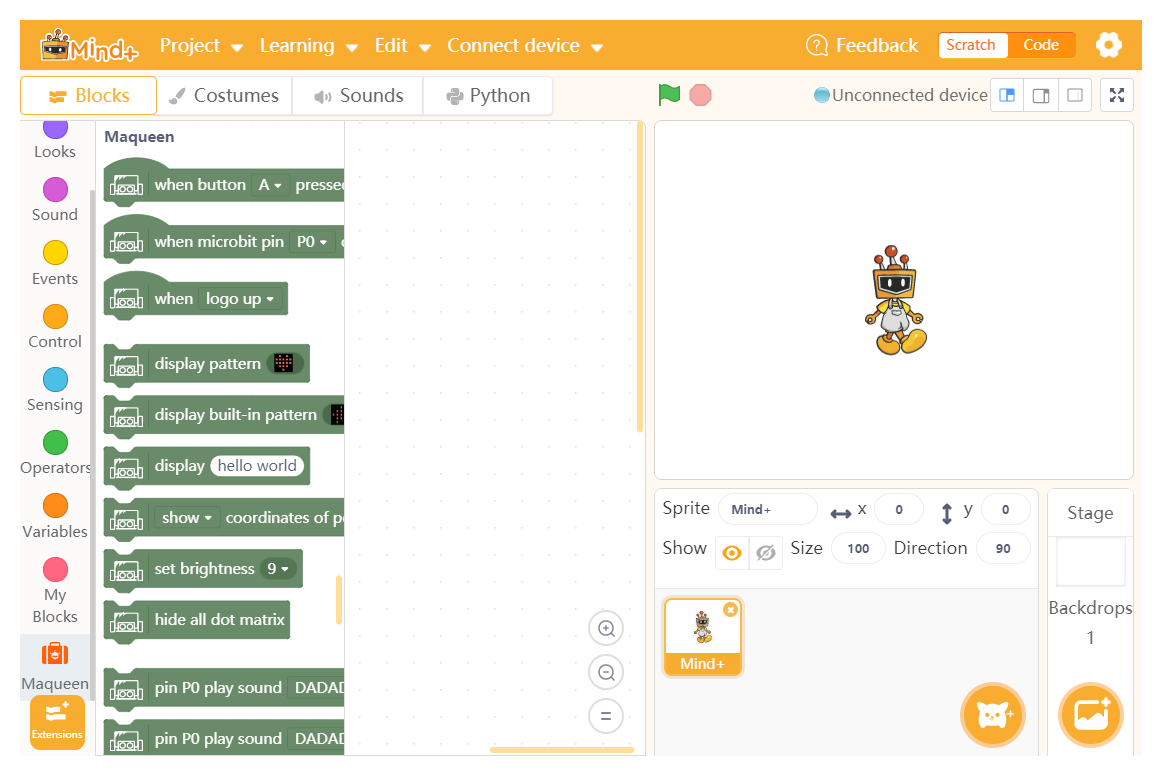
プログラミング環境
micro:Maqueen V3.0のプログラミングは、MakeCodeエディター、またはDFROBOTが提供するMind+を使います。MakeCodeエディターでは、拡張機能「maqueen」を使ってmicro:Maqueen V3の各機能を制御します。

Mind+は、Scratch 3.0をベースにして作られたオフラインエディターです。同様に拡張機能「Maqueen」を使って制御します。
2.micro:Maqueen V3.0の機能
81mm×85mm×44mm(75.55g)の小さなボディにさまざまなデバイスとセンサーを搭載しています。
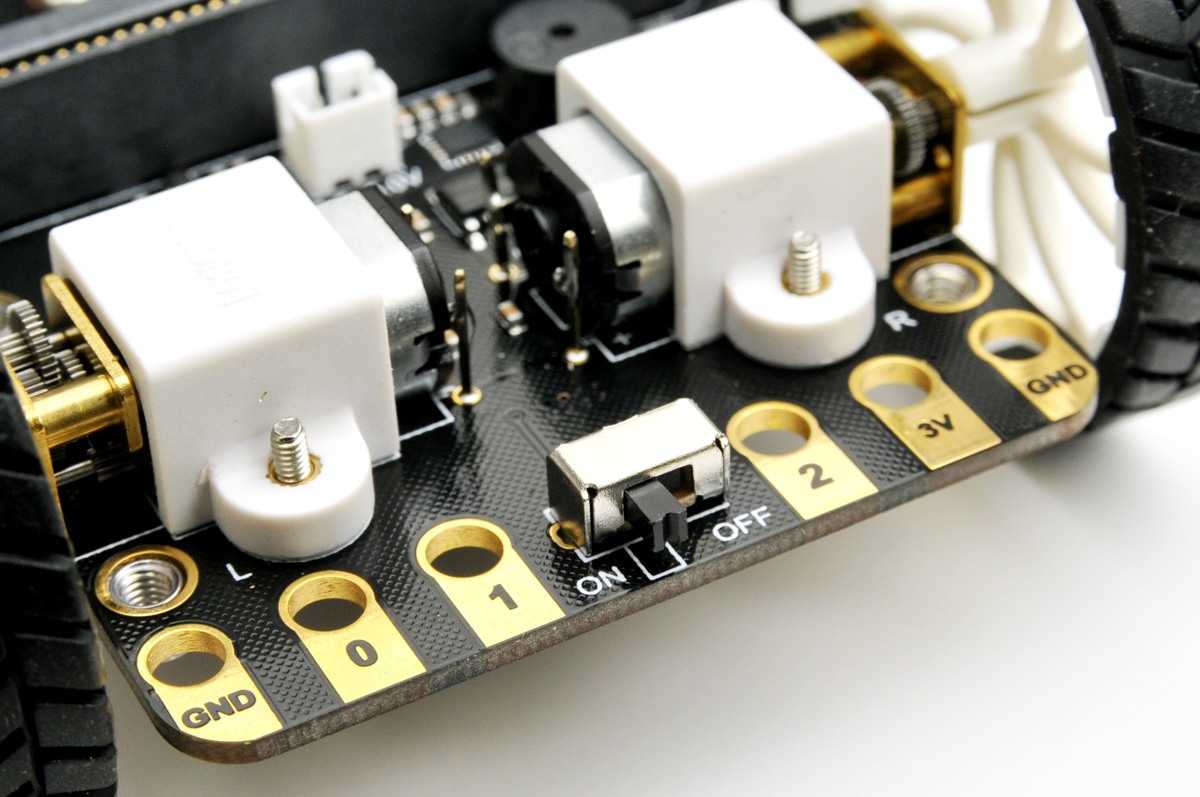
駆動輪(後輪)
駆動輪(後輪)は、メタルギアを採用した耐久性のある強力な小型モーターで動作します。左右の独立した駆動輪の回転方向と回転速度を別々に制御できるので、前進・後進・右回転・左回転などが行えます。最大の回転速度は133rpmです。
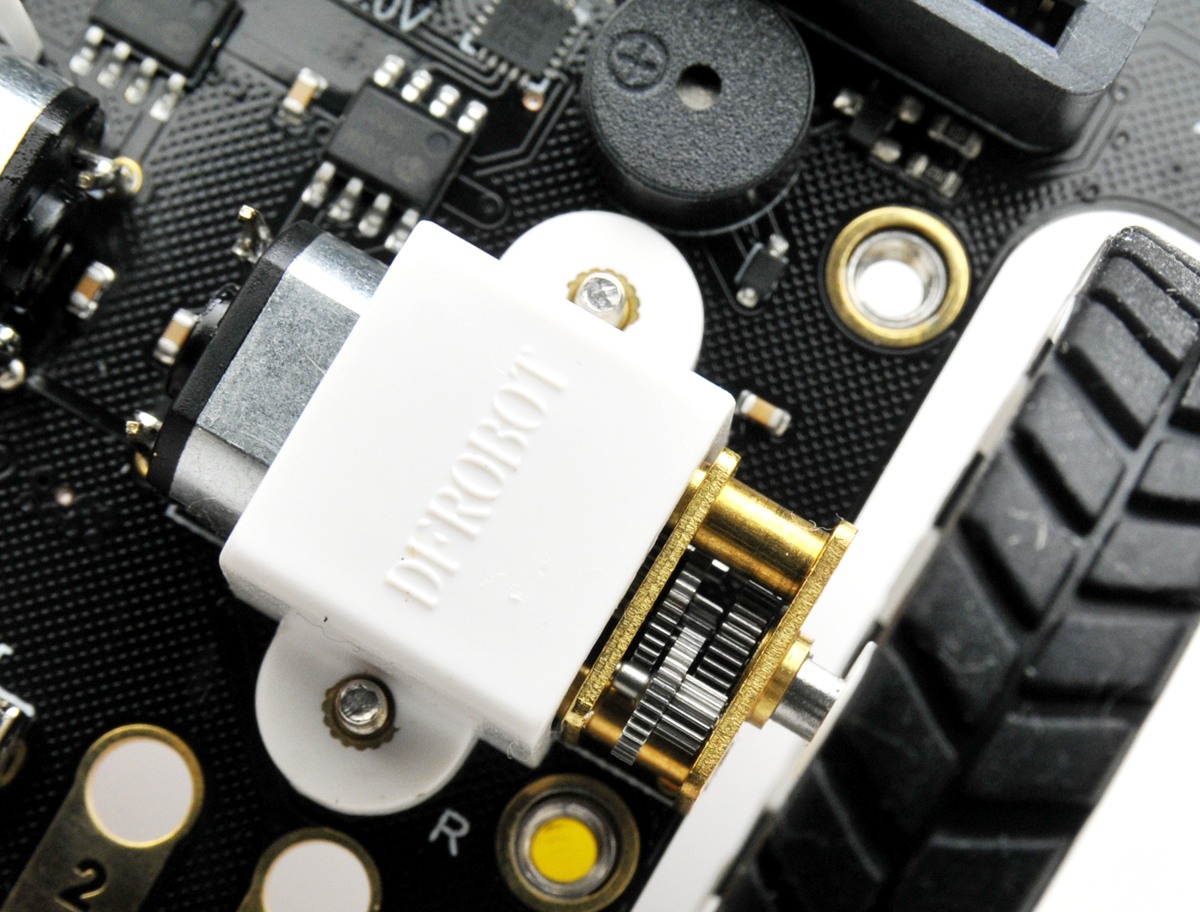
補助輪(前輪)
補助輪(前輪)は、耐摩耗性に優れたPOM(ポリアセタール)素材です。自己潤滑性があるため、なめらかに回転します。
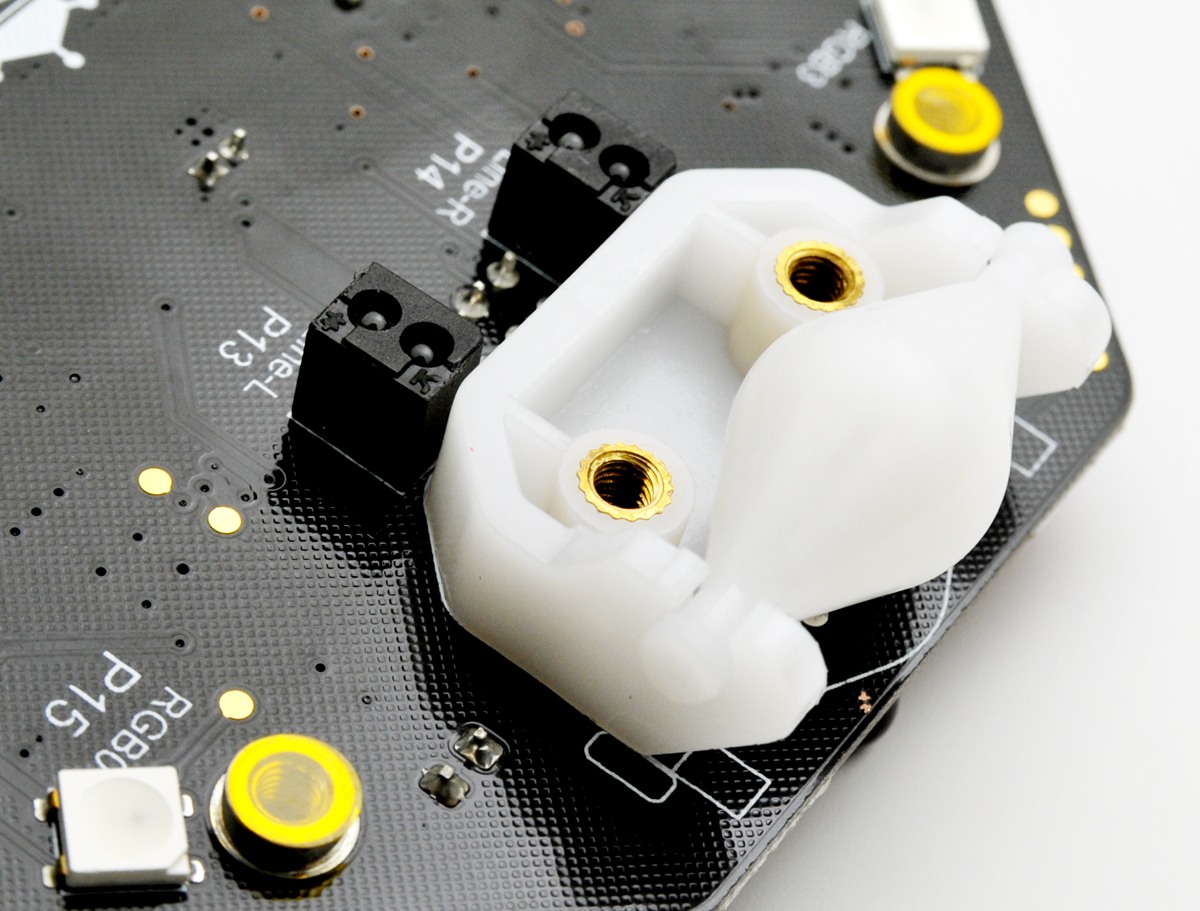
ブザー
スイッチでオン・オフできるブザーで音楽を鳴らすことができます。端子P0に接続されています。
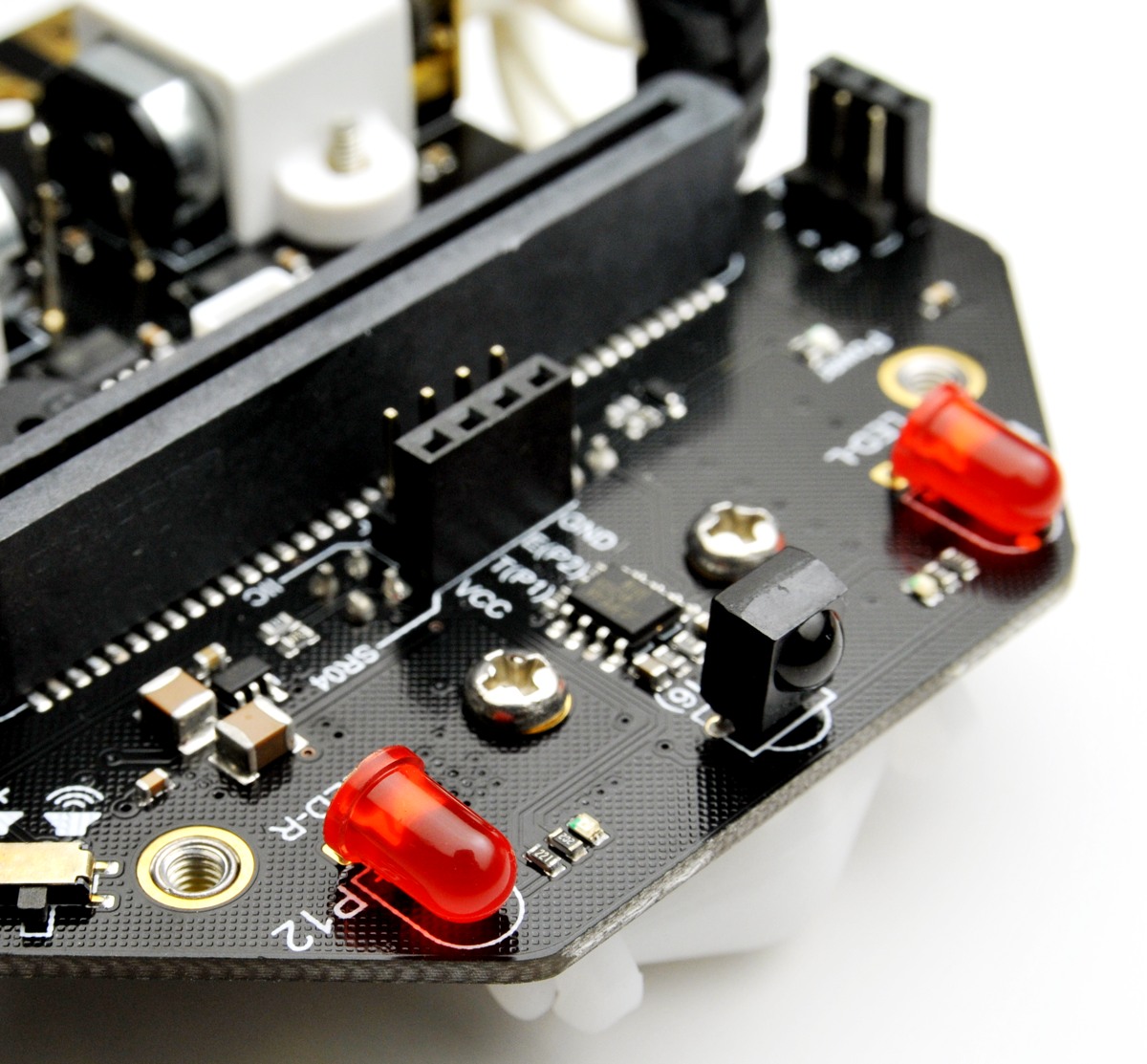
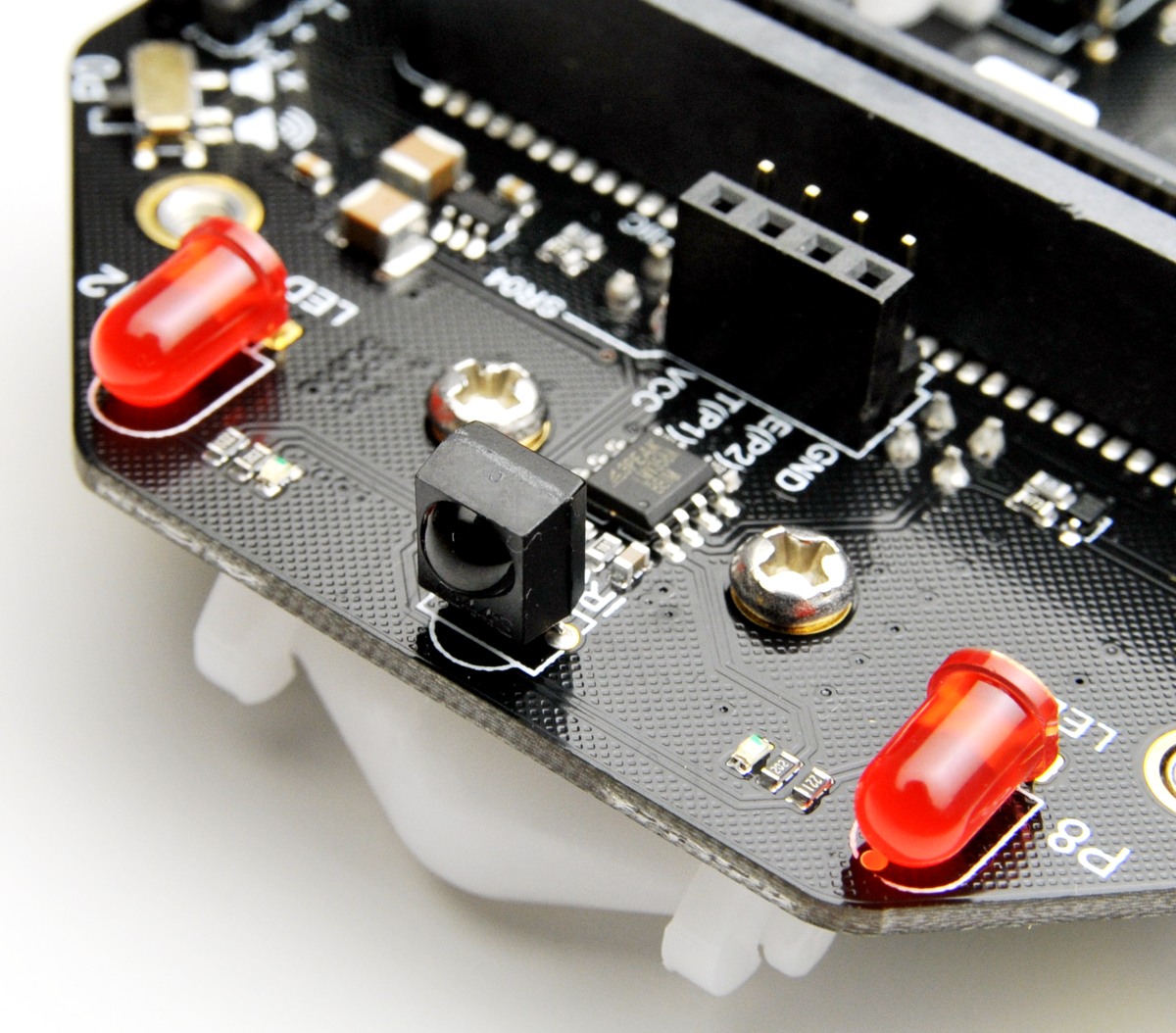
赤色LED(2個)
シャーシの前部に2個の赤色LEDを搭載しています。右側が端子P12、左側が端子P8に接続されています。デジタル出力、またはアナログ出力で点灯させることができます。
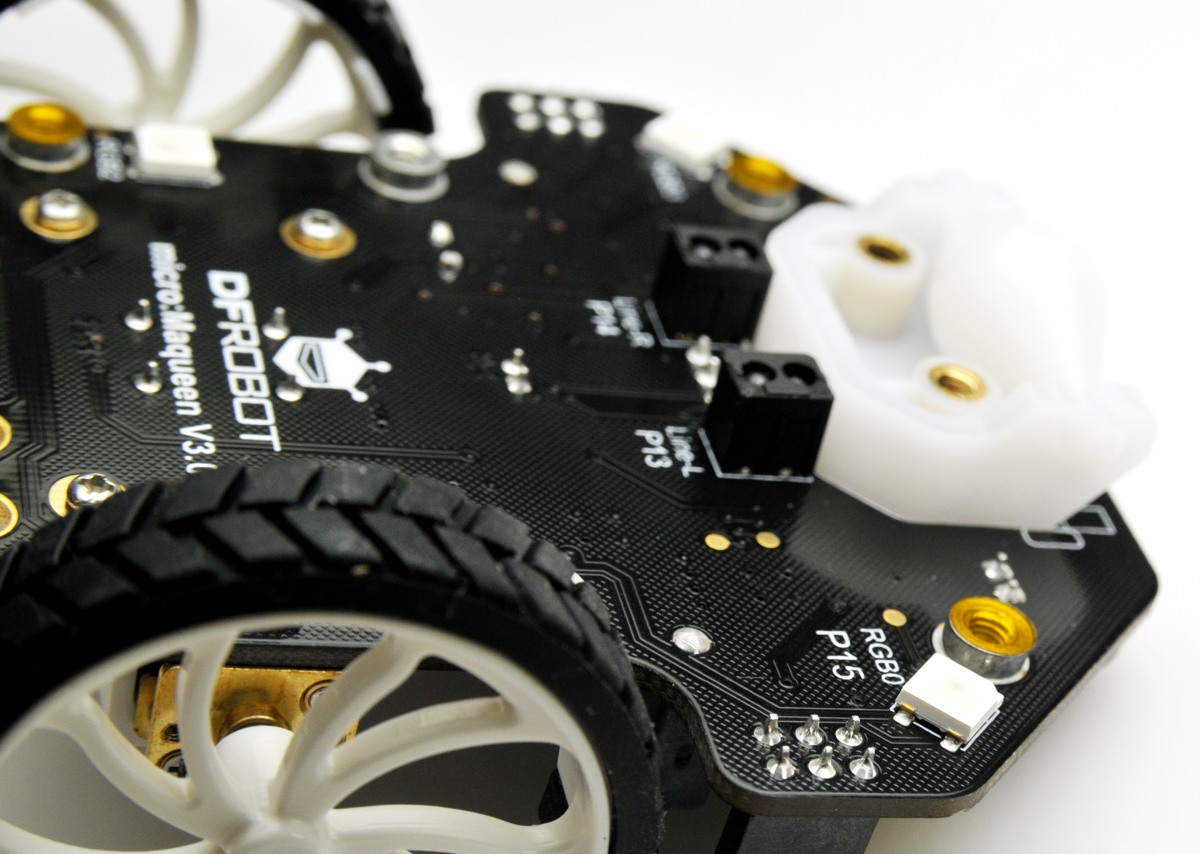
RGB LED(4個)
シャーシの底部に4個のRGB LEDを搭載しています。端子P15に接続されています。NeoPixelの拡張機能を使って点灯させることができます。RGB LEDのプログラム例を「5-6.micro:Maqueen V3.0【電飾制御編】」で紹介しています。
赤外線受信(リモコン)モジュール
シャーシの前部に赤外線受信(リモコン)モジュールを搭載しています。端子P16に接続されています。
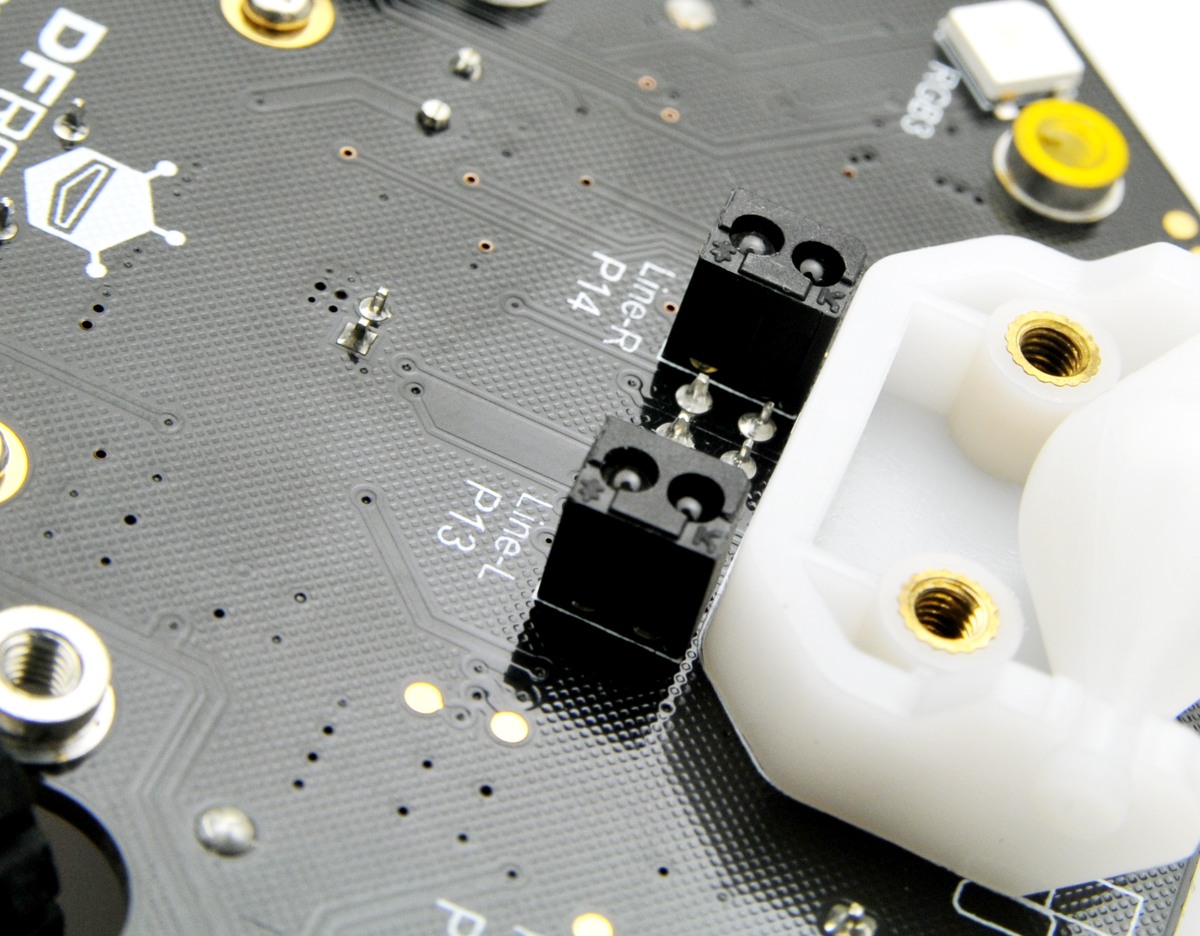
赤外線グレースケールセンサー(ライントラッキングセンサー)
シャーシの底部に赤外線グレースケールセンサー(ライントラッキングセンサー)を搭載しています。右側が端子P14、左側が端子P13に接続されています。また、シャーシの上部にはセンサーの動作状況を示すLEDがついています。
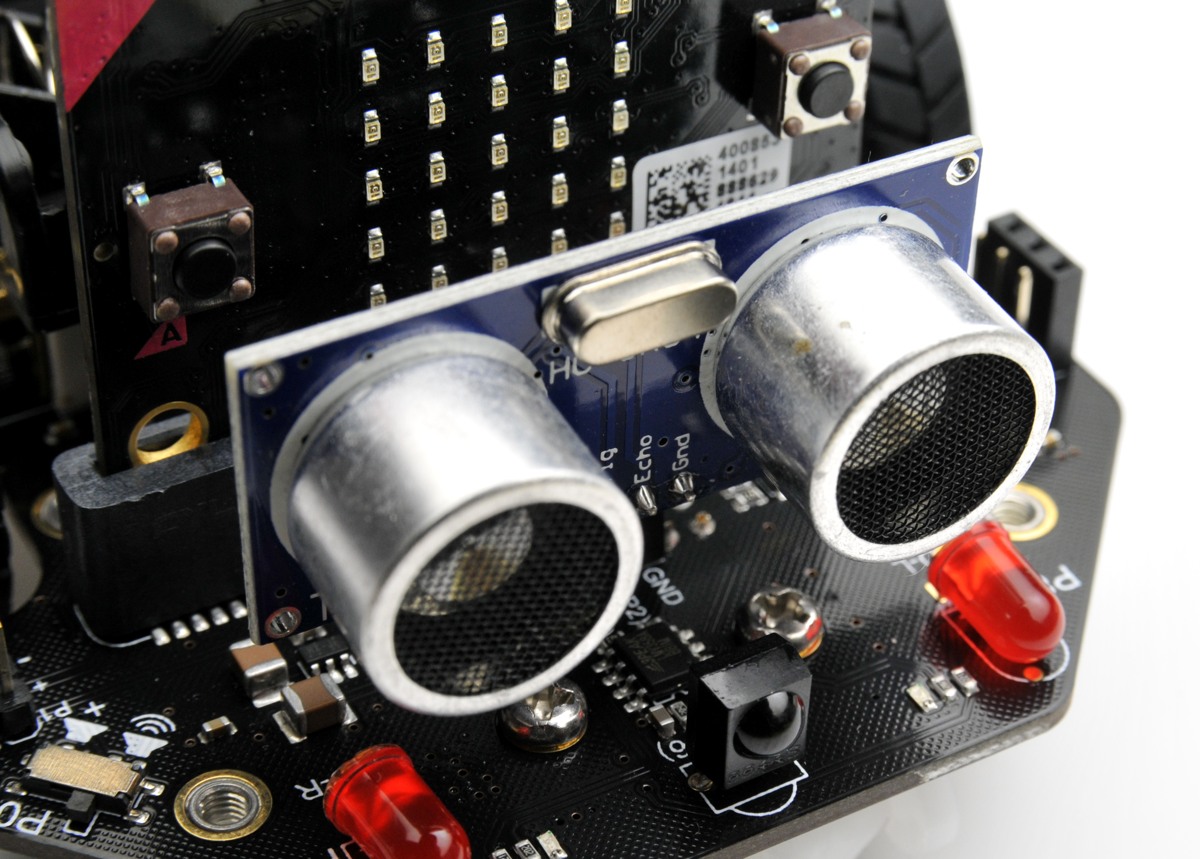
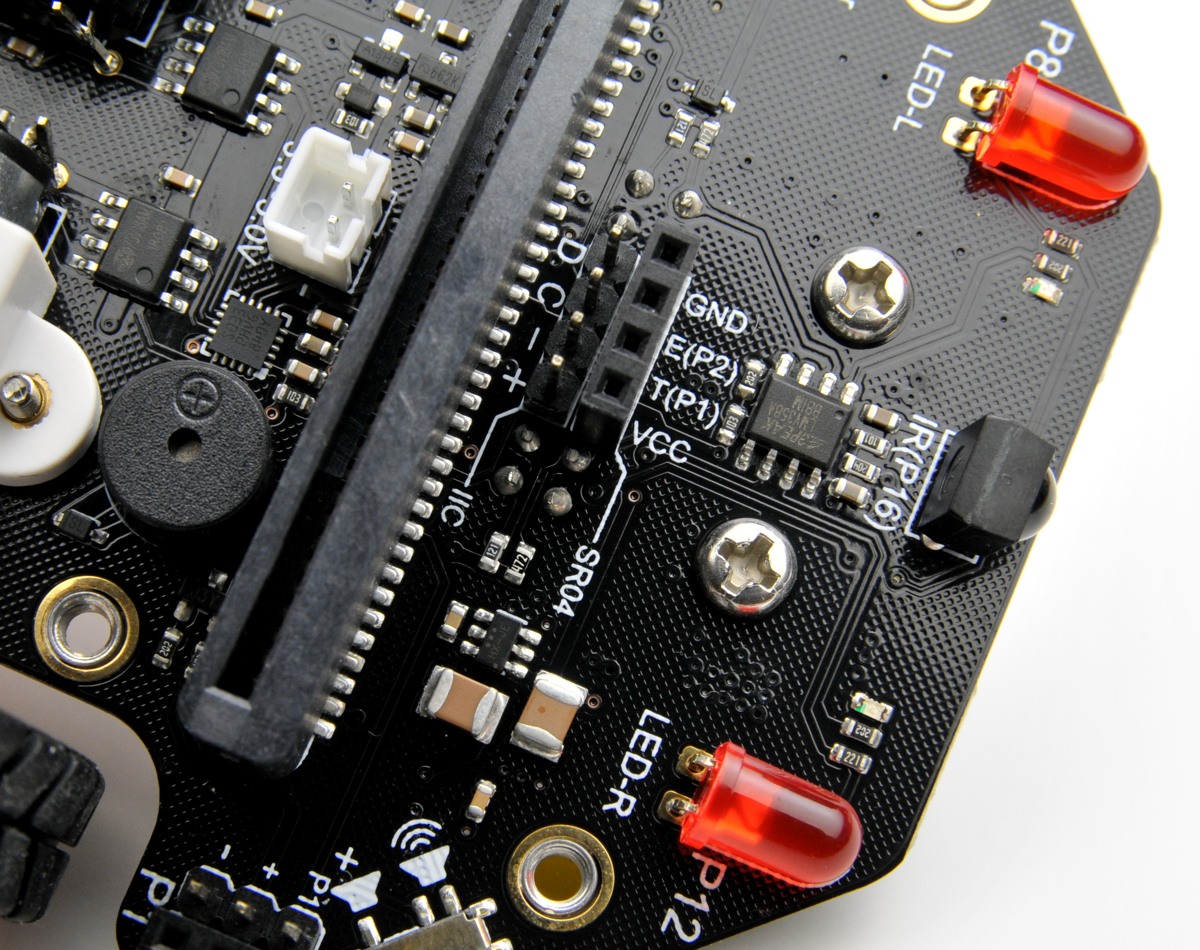
SR04/SR04P超音波センサーインタフェース
シャーシの上部にSR04/SR04P超音波センサーインタフェースを搭載しています。付属の超音波センサーを取り付けます。超音波センサーのプログラム例を「5-4.micro:Maqueen V3.0【衝突回避編】」で紹介しています。
I2C(IIC)インタフェース
シャーシの上部にI2C(IIC)インタフェースを搭載しています。
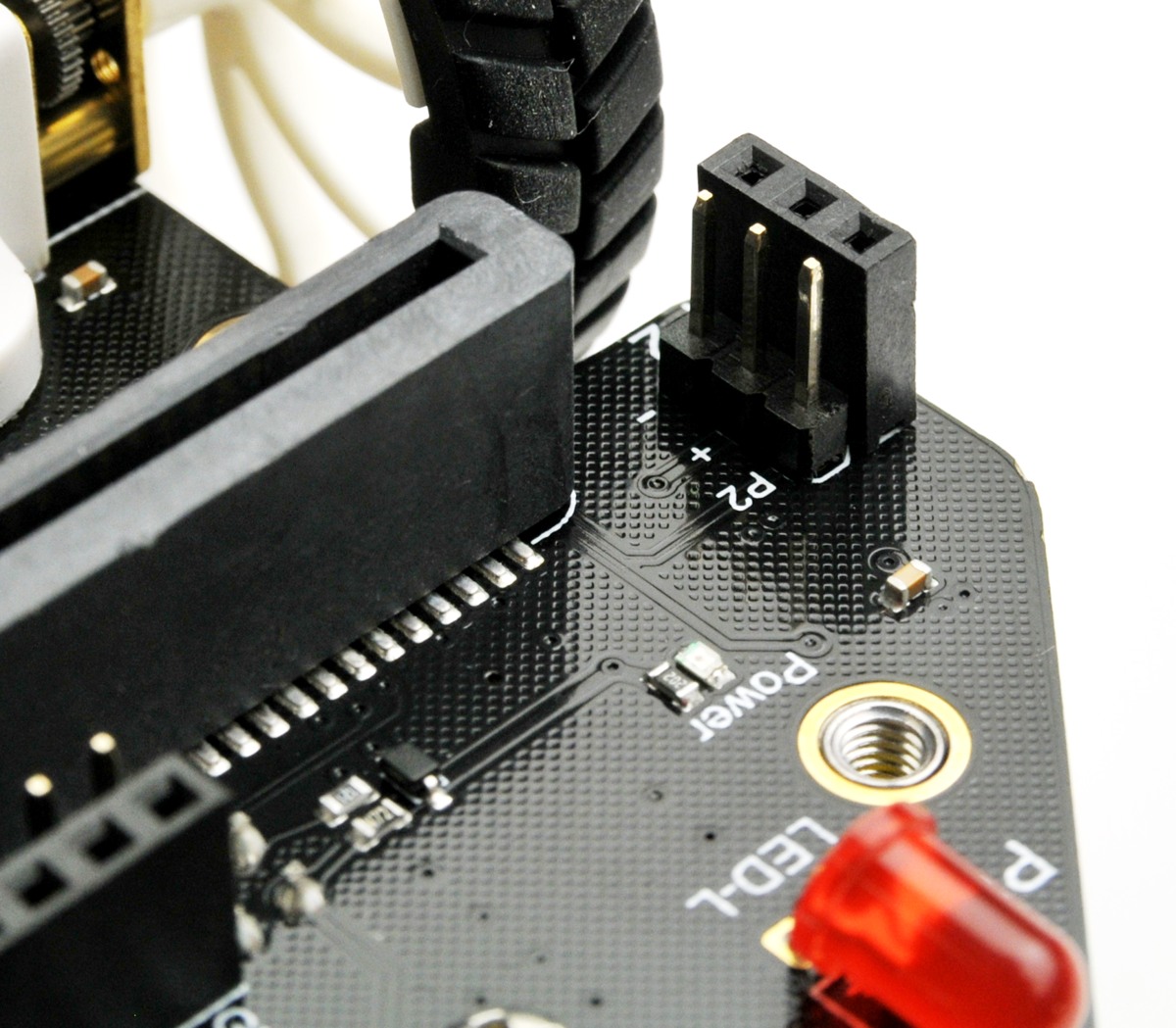
Gravity拡張インタフェース(2個)
シャーシの上部に2個(左右)のGravity拡張インタフェースを搭載しています。DFROBOTのGravityシリーズ(各種センサー)を取り付けることができます。右側が端子P1、左側が端子P2に接続されています。
エッジコネクター
シャーシの後部にmicro:bitのエッジコネクターと同じ端子を搭載しています。ただし、形状は異なります。
さらに詳細な情報は、DFROBOTのウェブサイト「micro: Maqueen micro:bit Educational Programming Robot Platform」をご覧ください。
また、micro:Maqueen V3.0の組み立て方法は「5-2.micro:Maqueen V3.0【組み立て編】」で解説しています。
おすすめ品








