micro:Maqueen V4.0 + Mechanic-Loader

micro:Maqueen V4.0のオプションとして用意されているMechanic-Loader(メカニックローダー)の取り付け手順を紹介します。
5-13-1.micro:Maqueen V4.0とMechanic-Loader
micro:Maqueen V4.0
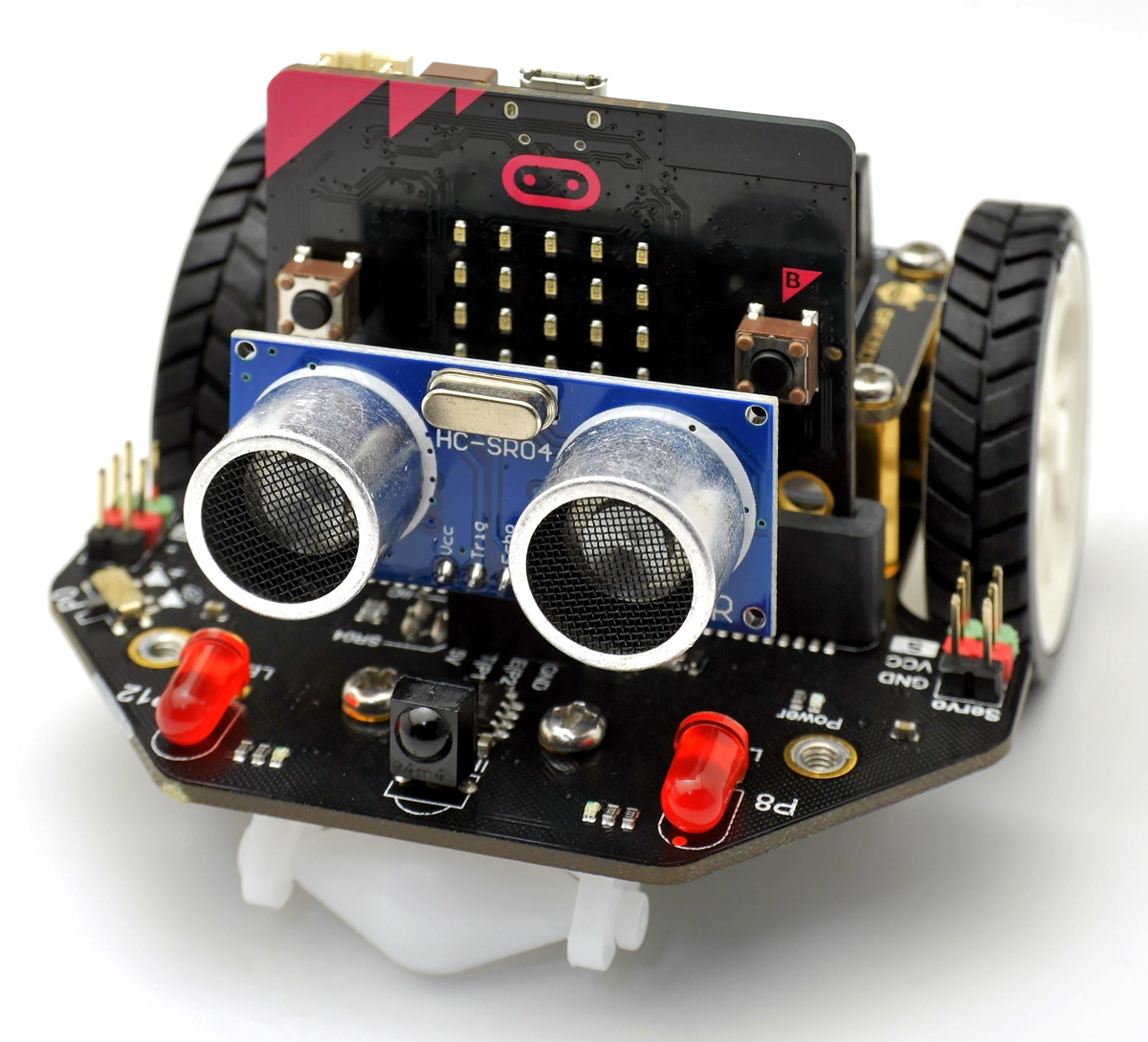
DFROBOTのmicro:Maqueen V4.0(マイクロマックイーン V4.0)は、独立した二つの駆動輪を持つSTEM教育用のグラフィカルプログラミングロボットです。別売りのmicro:bitを搭載することで、駆動輪などをプログラミングで制御することができます。
電源電圧は3.5V~5Vで、通常は単四型乾電池×3本を使用します。また、オプションの電源管理モジュール(リチウムイオン電池ホルダー)を取り付けることで、充電式のリチウムイオン電池(RCR123A)×1本で動作します。図5-13-1-1は、電源管理モジュールを搭載したmicro:Maqueen V4.0です。
Mechanic-Loader
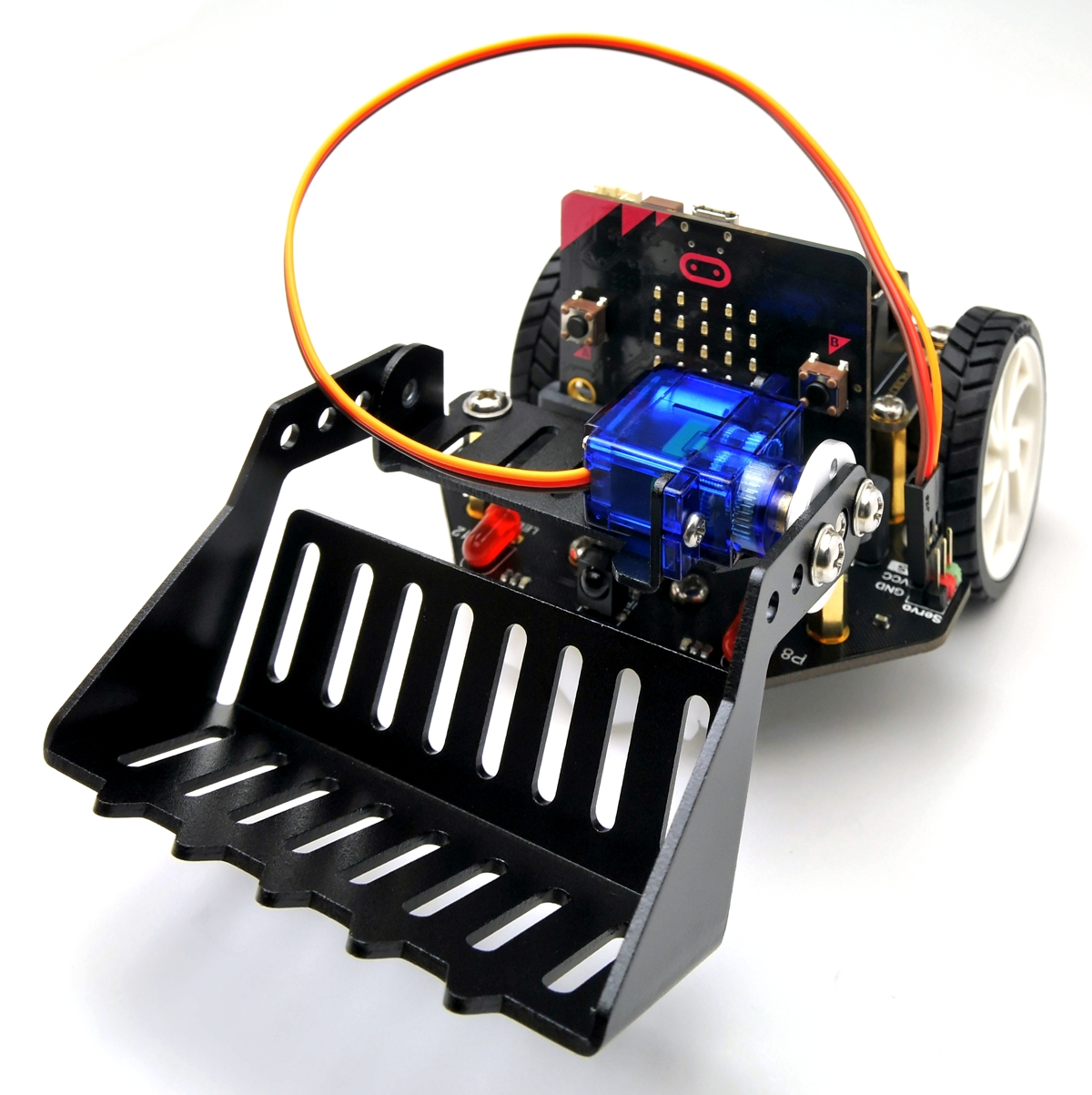
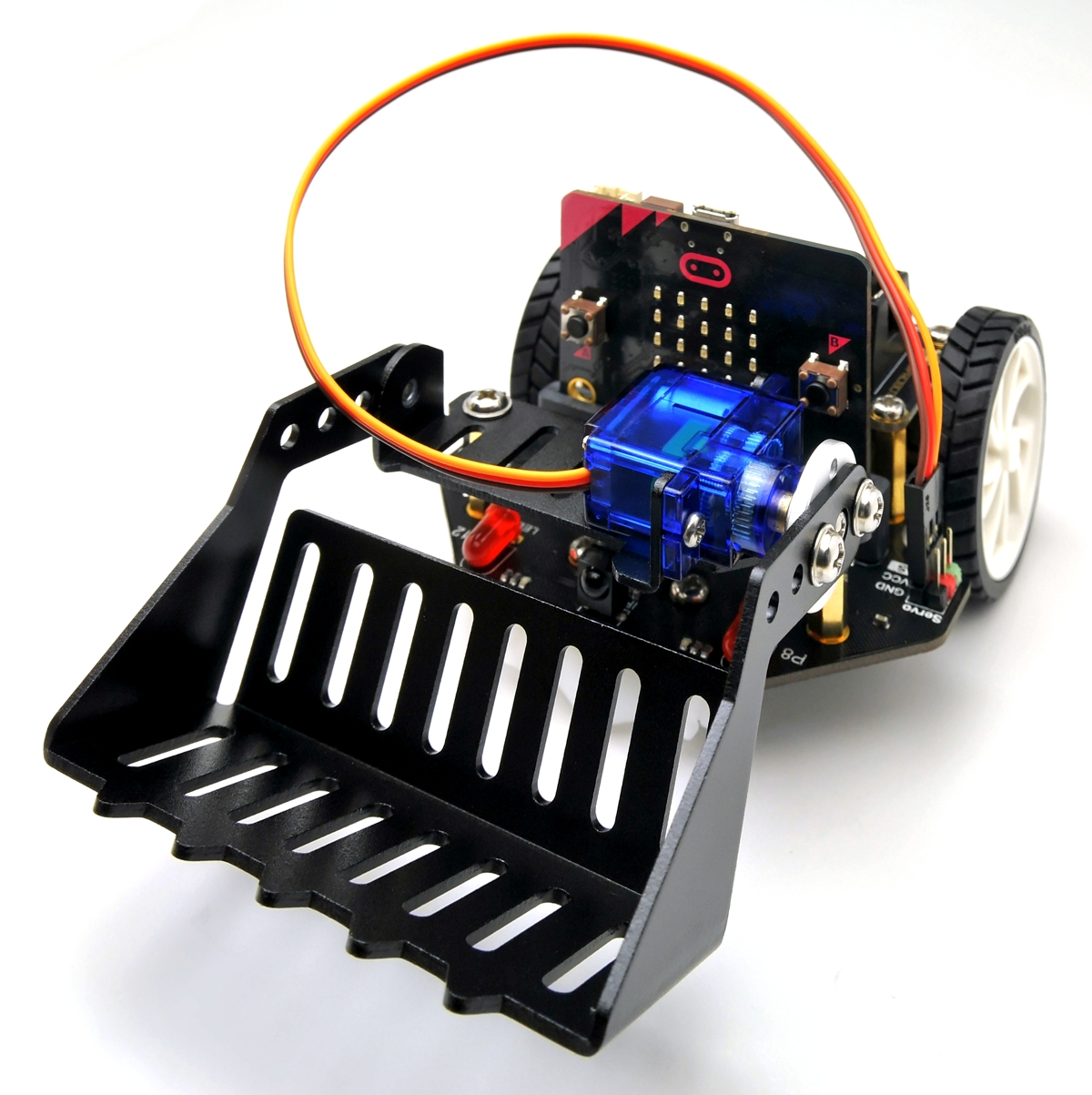
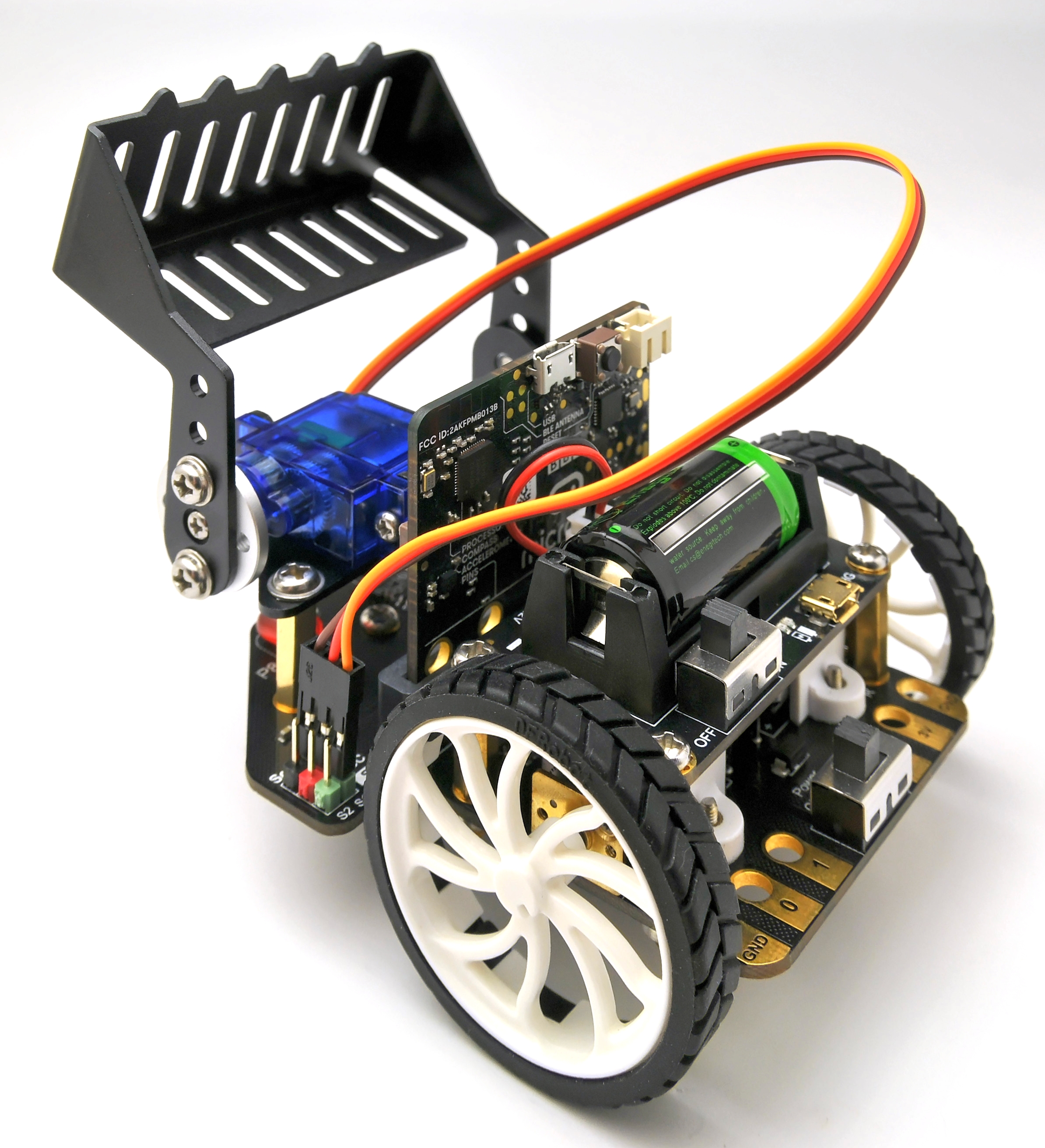
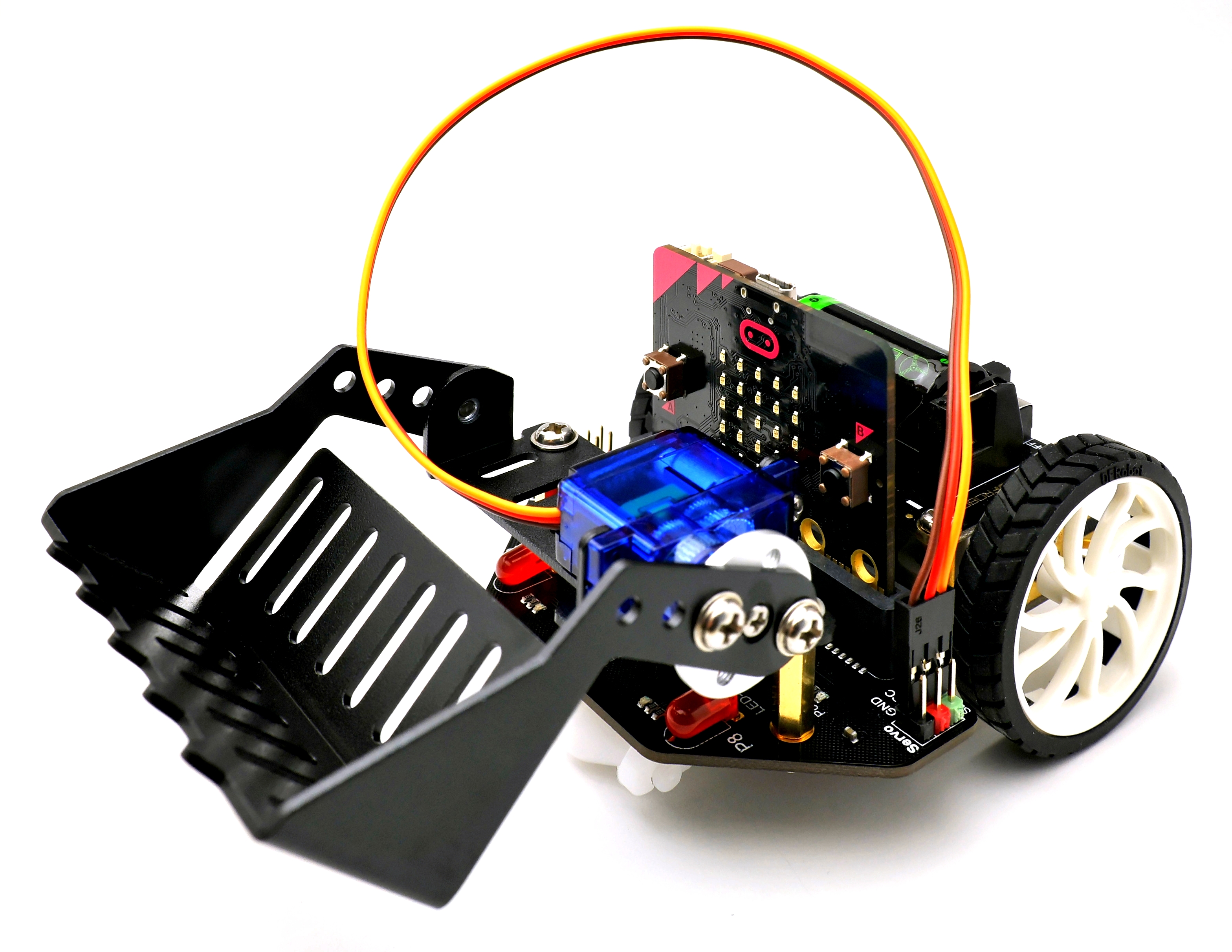
本記事では、micro:Maqueen V4.0のオプションとして用意されているMechanic-Loader(メカニックローダー)の取り付け手順を紹介します。Mechanic-Loaderは、micro:Maqueen V4.0の基板に取り付けるショベル(バケット)で、サーボモーターによって上下させることができます。サーボモーターの動作は、プログラミングによって制御(回転角度を指定)することができます。ただし、micro:Maqueen V4.0にあらかじめ搭載されている超音波センサーと一緒に使うことはできません。
5-13-2.Mechanic-Loaderの取り付け
Mechanic-Loaderの取り付けには、プラスドライバーが必要です。
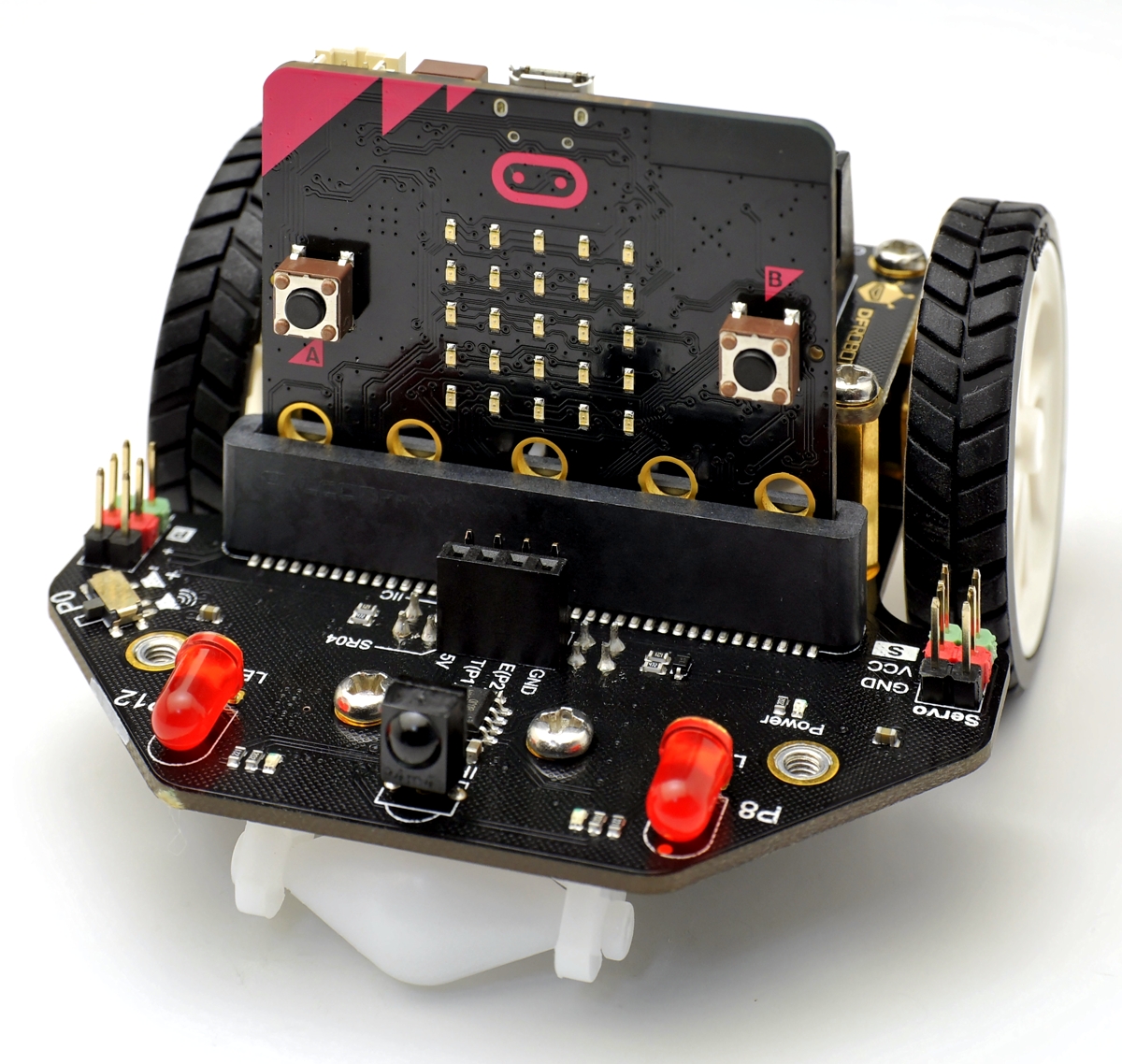
超音波センサーの取り外し
micro:Maqueen v4.0の超音波センサーを取り外します。
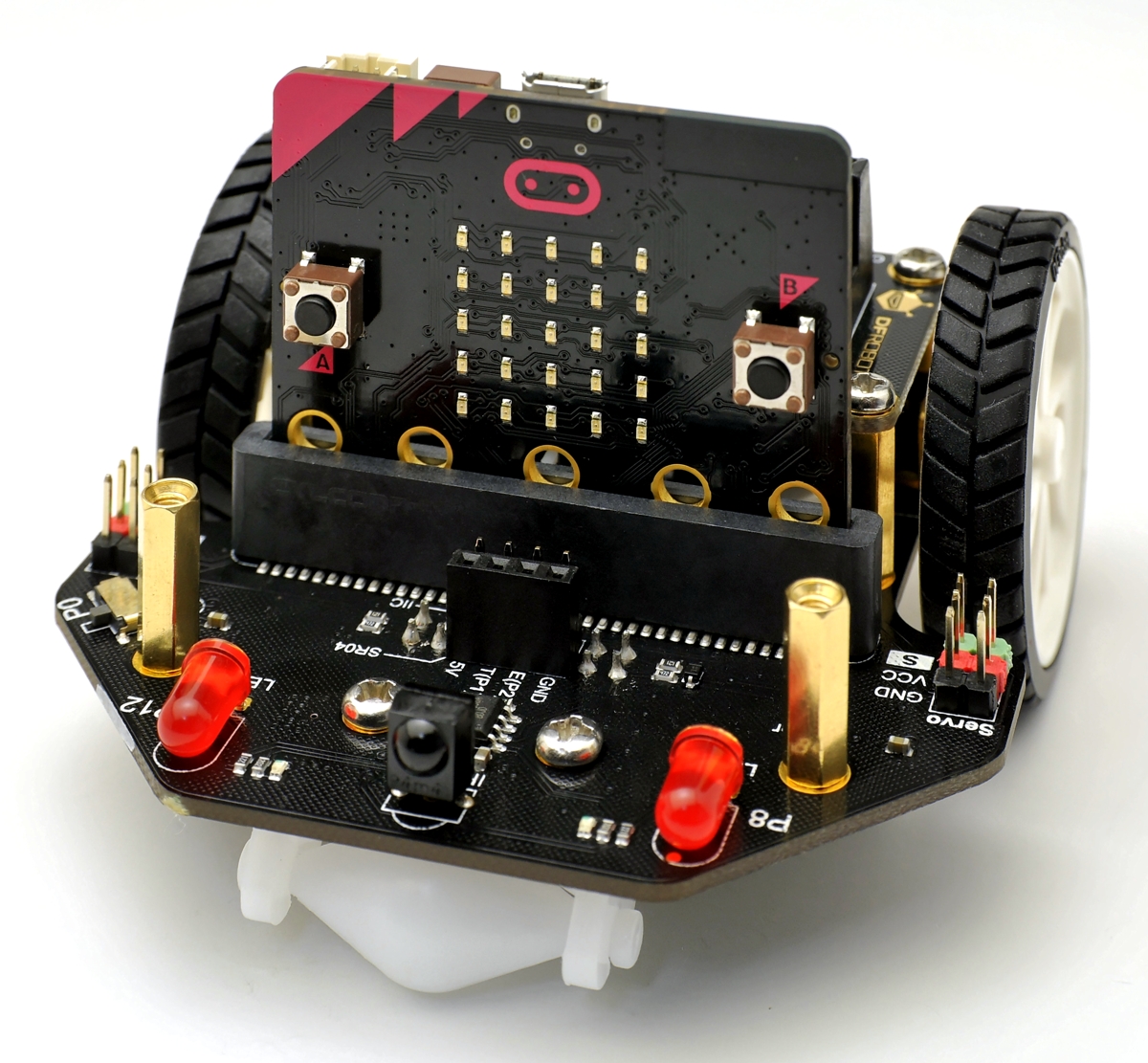
六角スペーサーの取り付け
micro:maqueen V4.0の基板上のネジ穴(2カ所)に六角スペーサーを取り付けます。ネジ穴(2カ所)は、図5-13-2-2の赤丸の部分です。

マウントプレートとサーボモーターの組み立て
マウントプレート・サーボモーター・M2.5×5mmのネジ(2本)を用意します。サーボモーターに付属しているネジは使用しません。
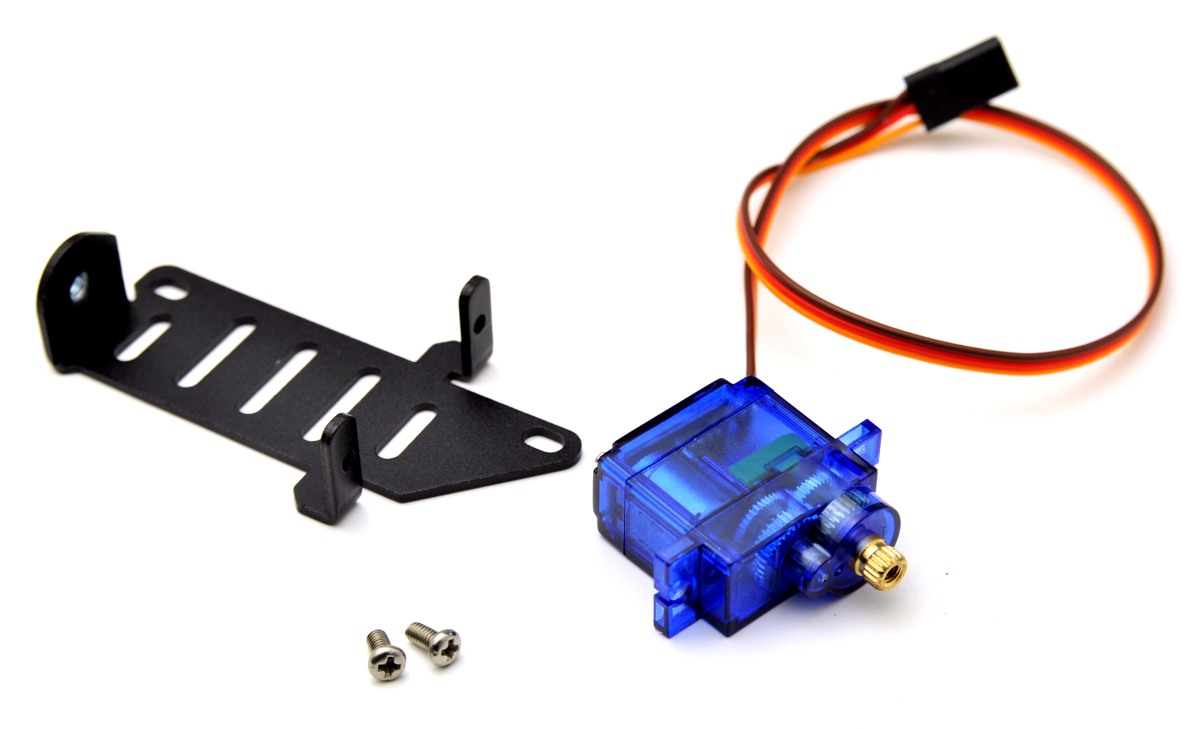
サーボモーターの向き(出力軸の位置)に注意しながら、ネジ止め(2カ所)します。

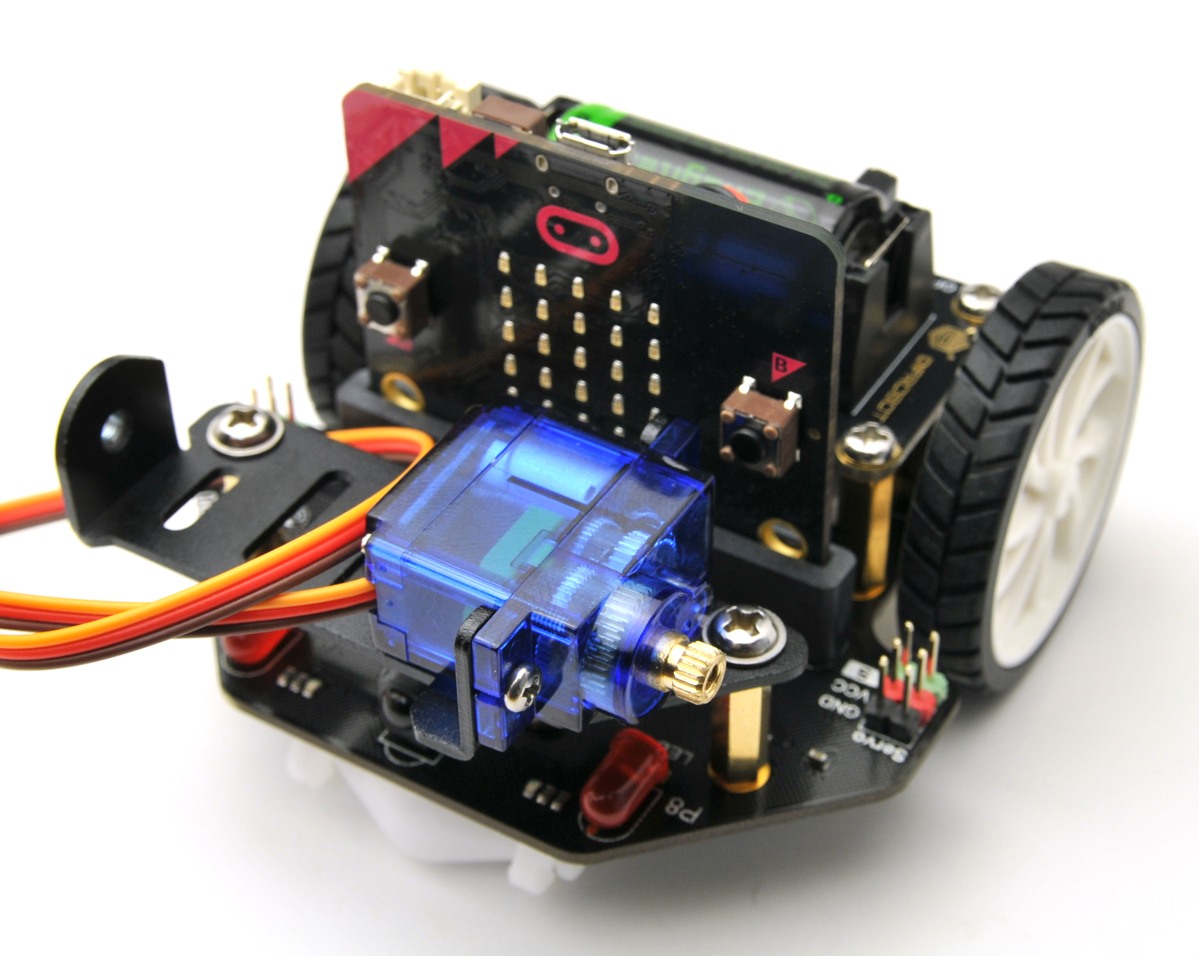
マウントプレートの取り付け
組み立てたマウントプレート・M3×5mmのネジ(2本)を用意します。
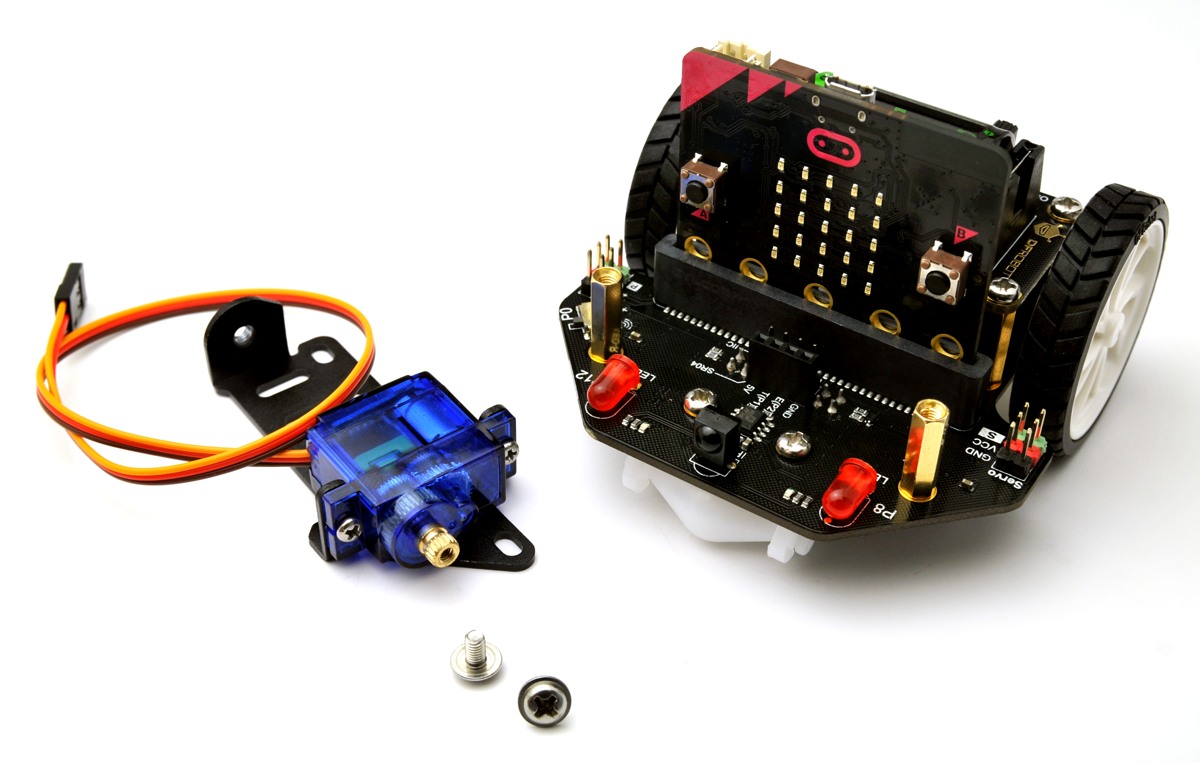
マウントプレートの向きに注意しながら、六角スペーサーにネジ止め(2カ所)します。
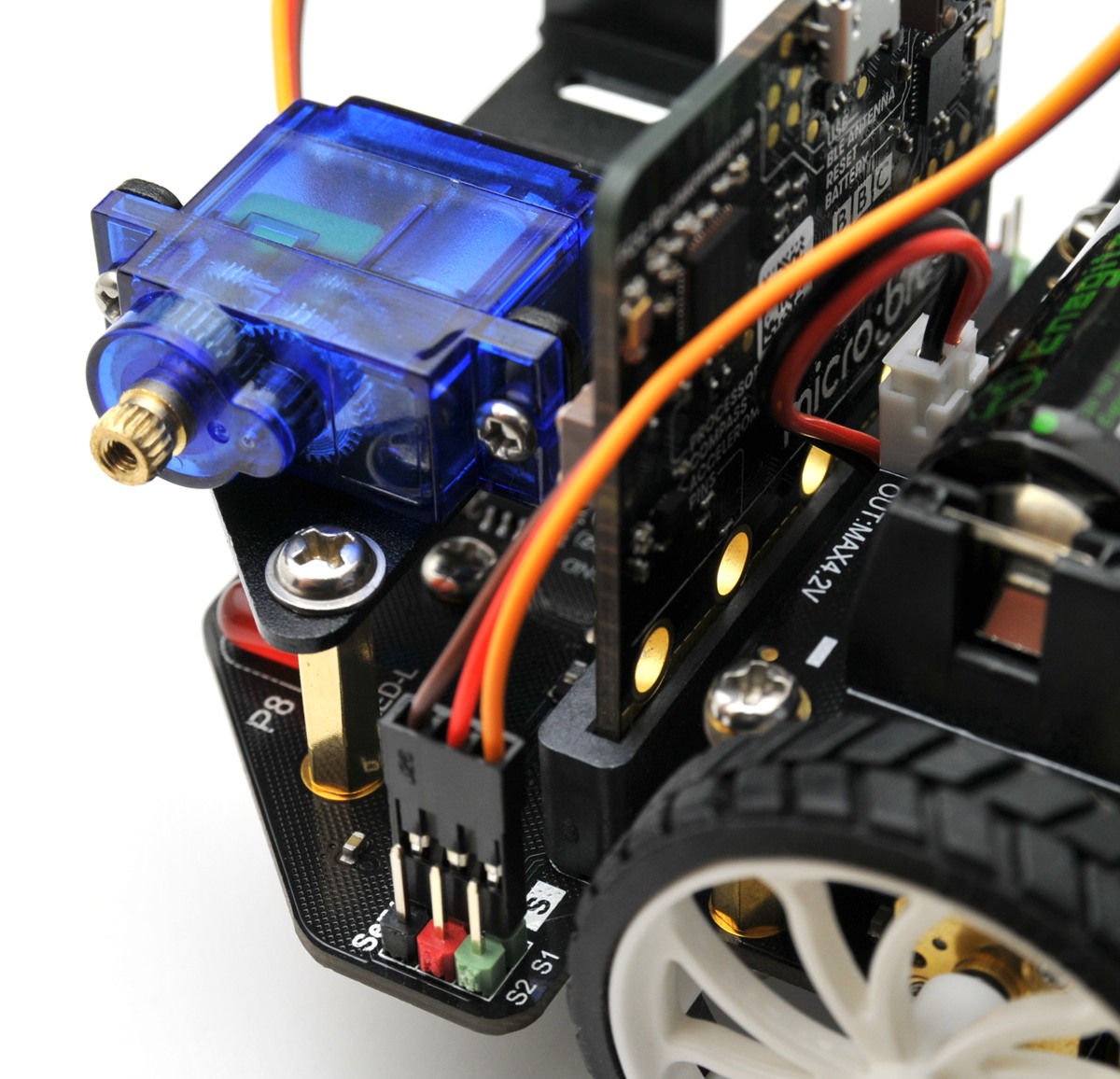
コネクターの接続
サーボモーターのコネクターを、micro:Maqueen V4.0のサーボモーター端子(S1)に接続します。2つのサーボモーター端子(S1・S2)が隣り合っているので、間違えないように注意します。また、コネクターの向きにも注意します。
サーボモーターの動作確認と角度設定
ショベル(バケット)を取り付ける前に、サーボモーターの動作確認と角度を90度に設定するためのプログラミングを行います。
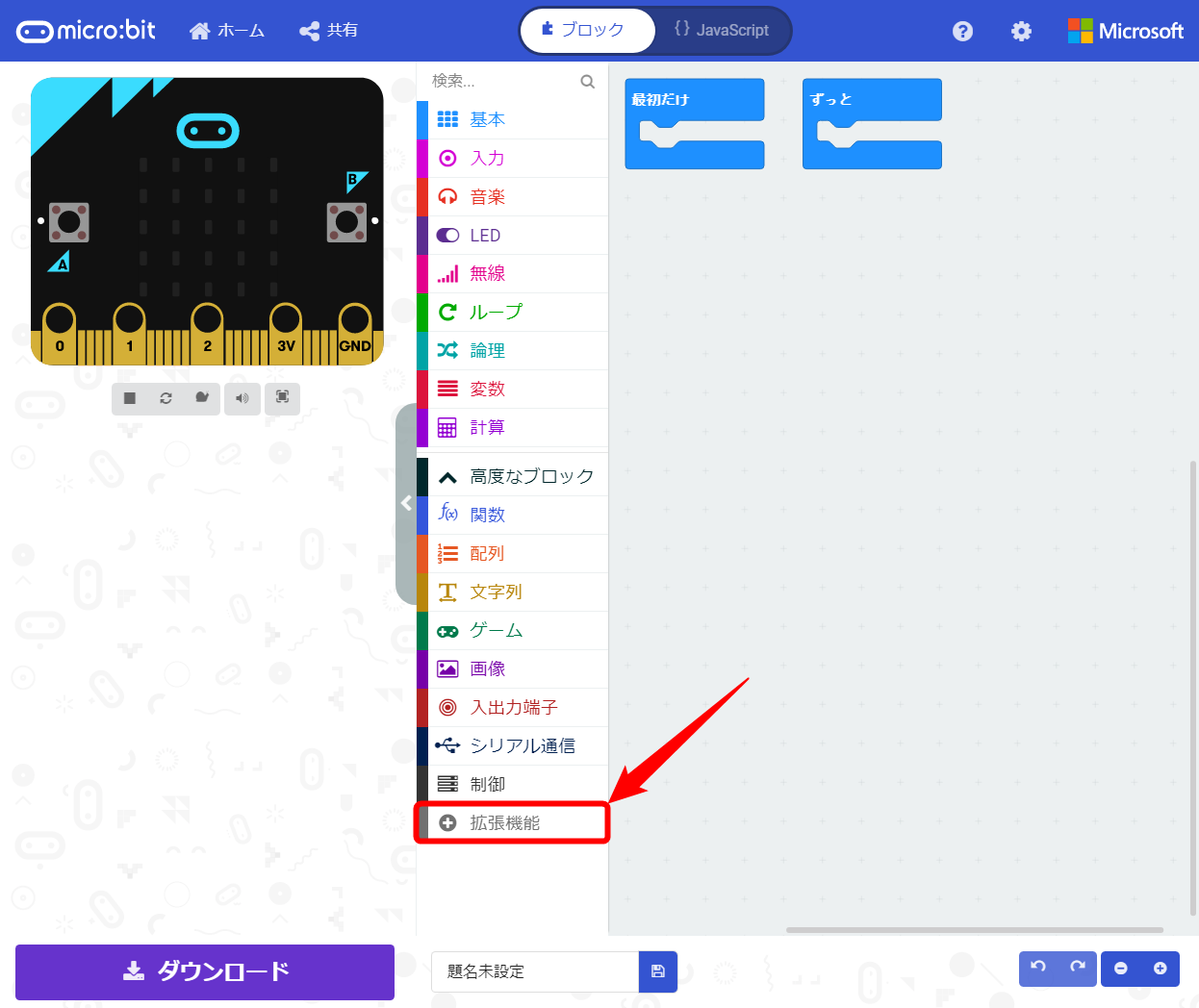
MakeCode for micro:bitへアクセスします。新しいプロジェクトを作成して、プログラミングに必要な拡張機能を追加するために「拡張機能」をクリックします。
「DFROBOT」で検索して「maqueen」をクリックします。
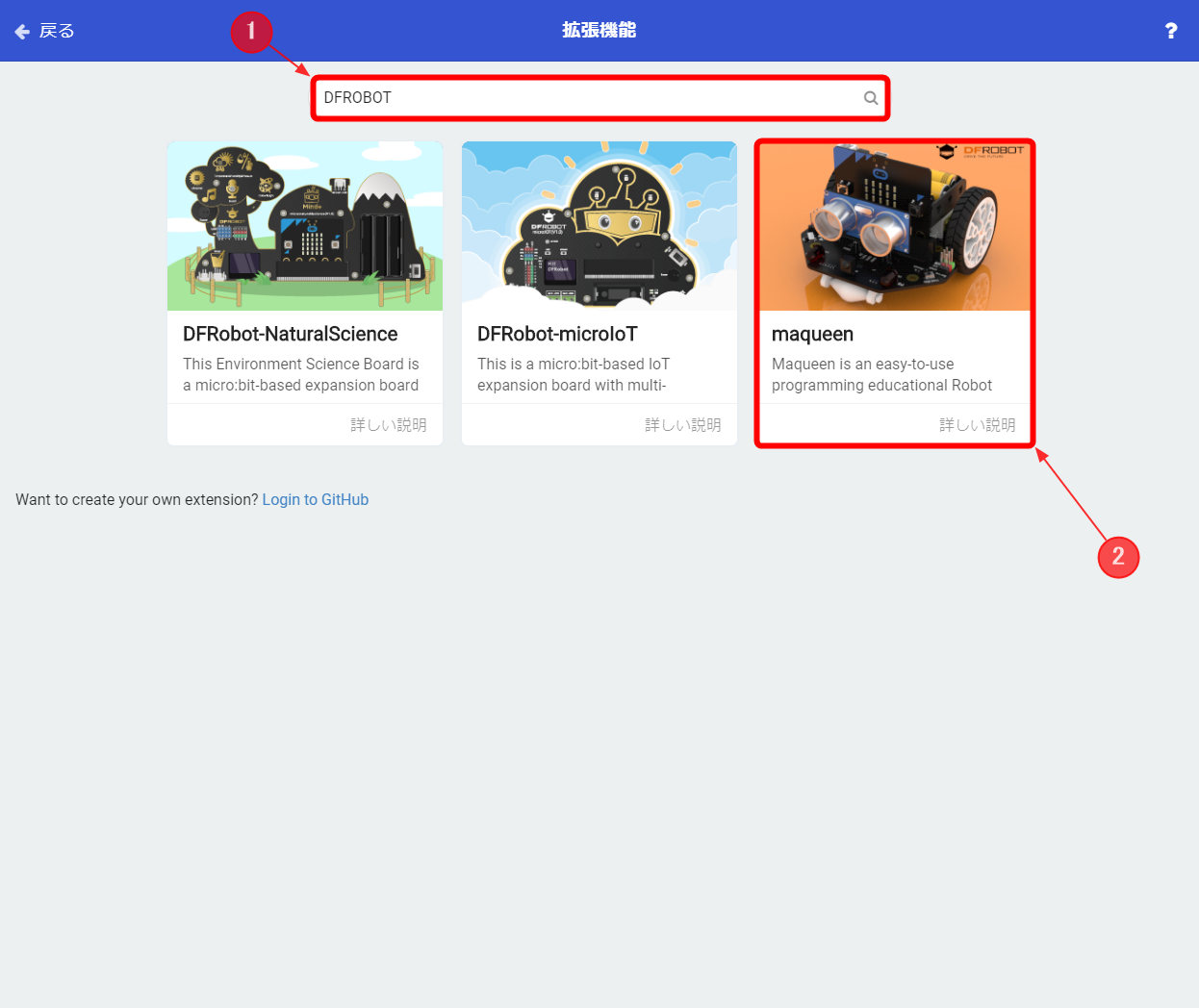
図5-13-2-11のようにプログラミングします。このプログラムは、micro:Maqueen V4.0のサーボ端子(S1)に接続されたサーボモーターの回転角度を0度・180度・90度に変化させるものです。プログラムが完成したら、micro:bitへ書き込みます。
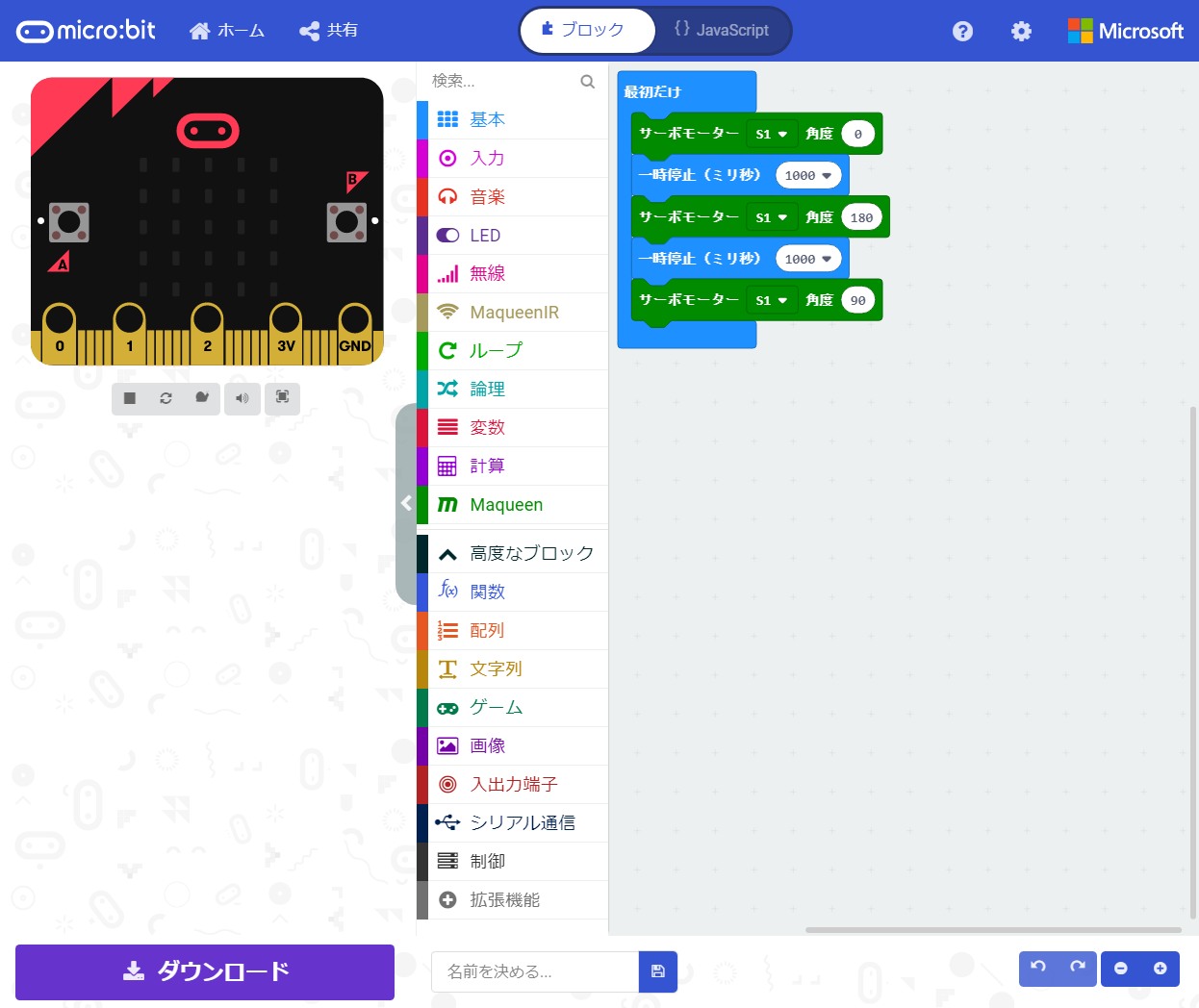
プログラムの書き込みが終わったら、micro:Maqueen V4.0の電源スイッチをオンにして、サーボモーターが動作することを確認します。サーボモーターは回転角度が90度の位置で停止します。電源スイッチをオフにして、この位置(90度)を維持したまま、以下の手順を実施します。
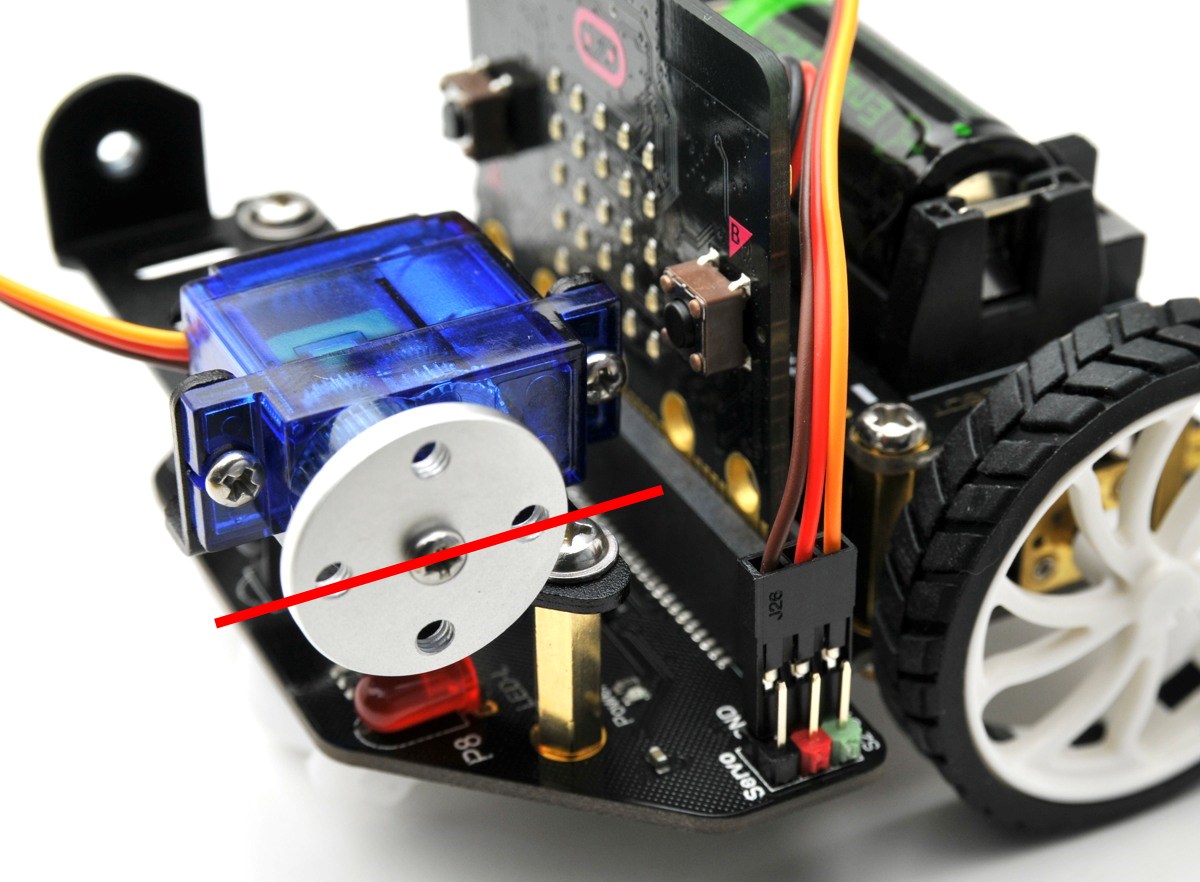
丸形サーボホーンの取り付け
丸形サーボホーン・M2.5×5mmのネジ(1本)を用意します。サーボモーターに付属しているネジは使用しません。
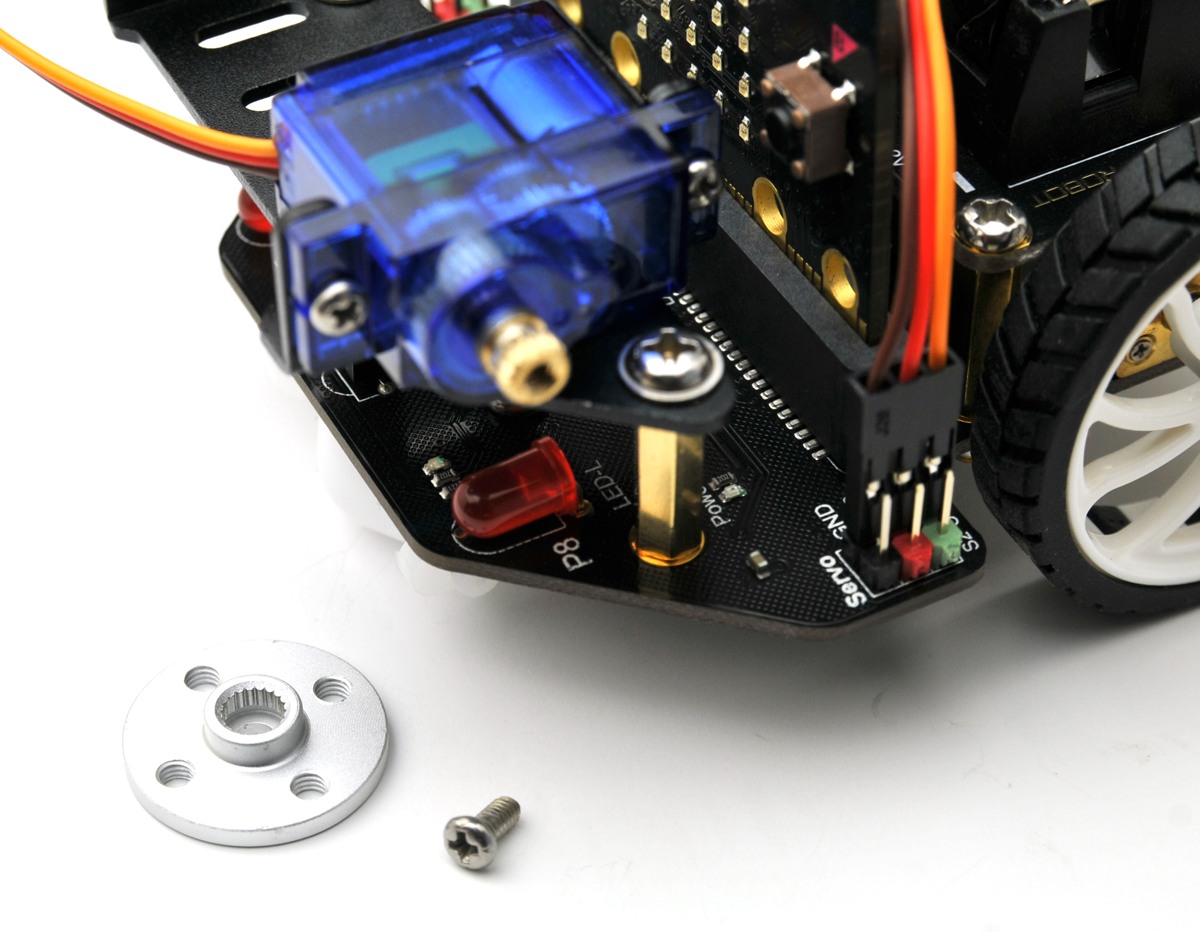
周辺にある4カ所のネジ穴のうち、中心を通る直線上にある2カ所がほぼ水平になるように丸形サーボホーンを押し込み、中央をネジ止めします。
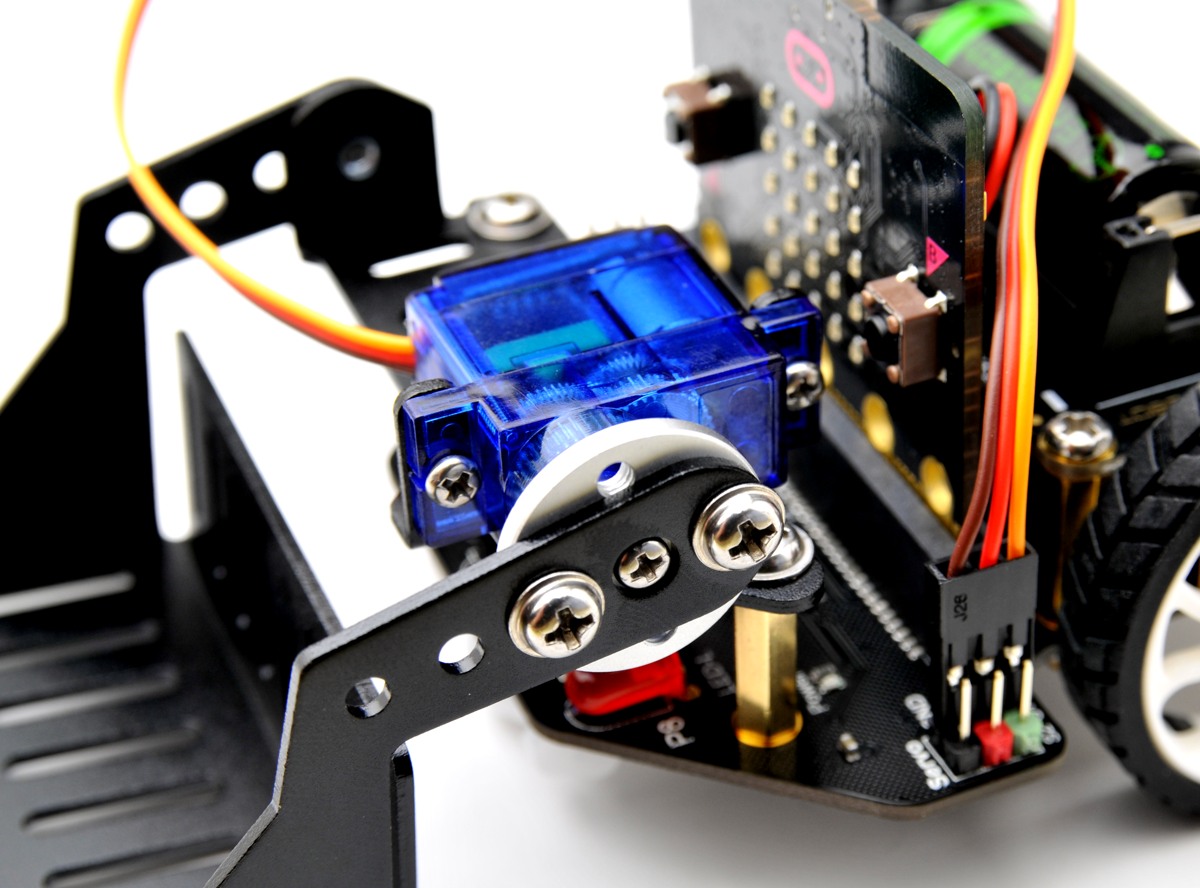
ショベル(バケット)の取り付け
ショベル(バケット)・M3×5mmのネジ(3本)を用意します。
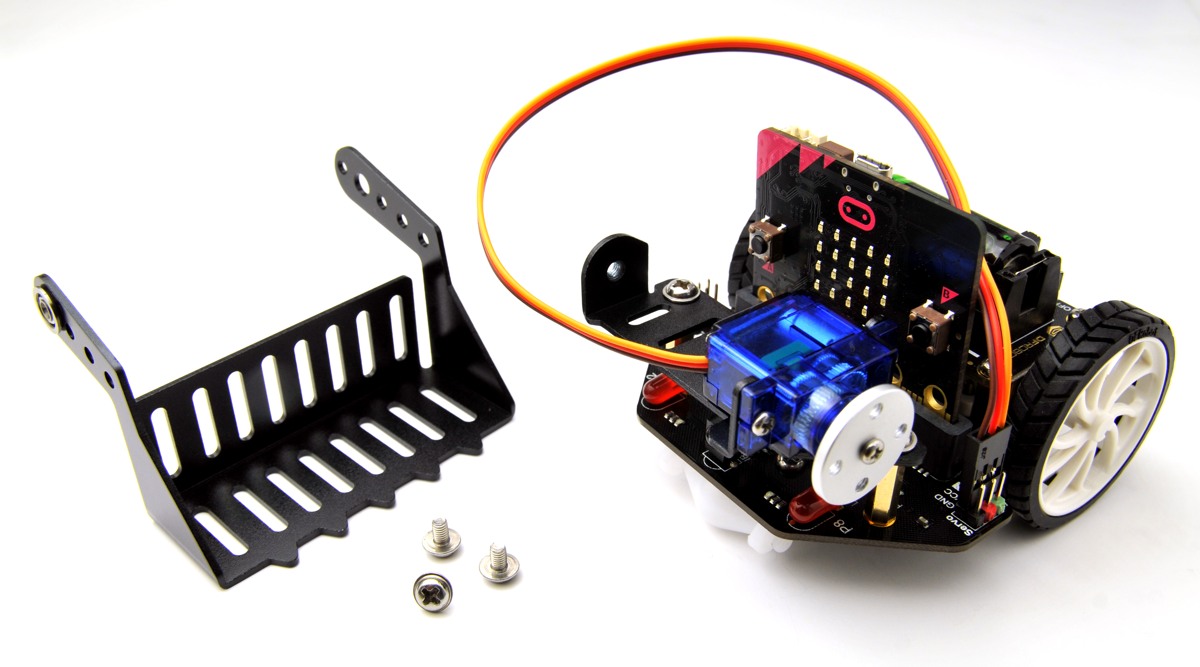
ショベル(バケット)のアームが水平になるように、丸形サーボホーンにネジ止め(2カ所)します。
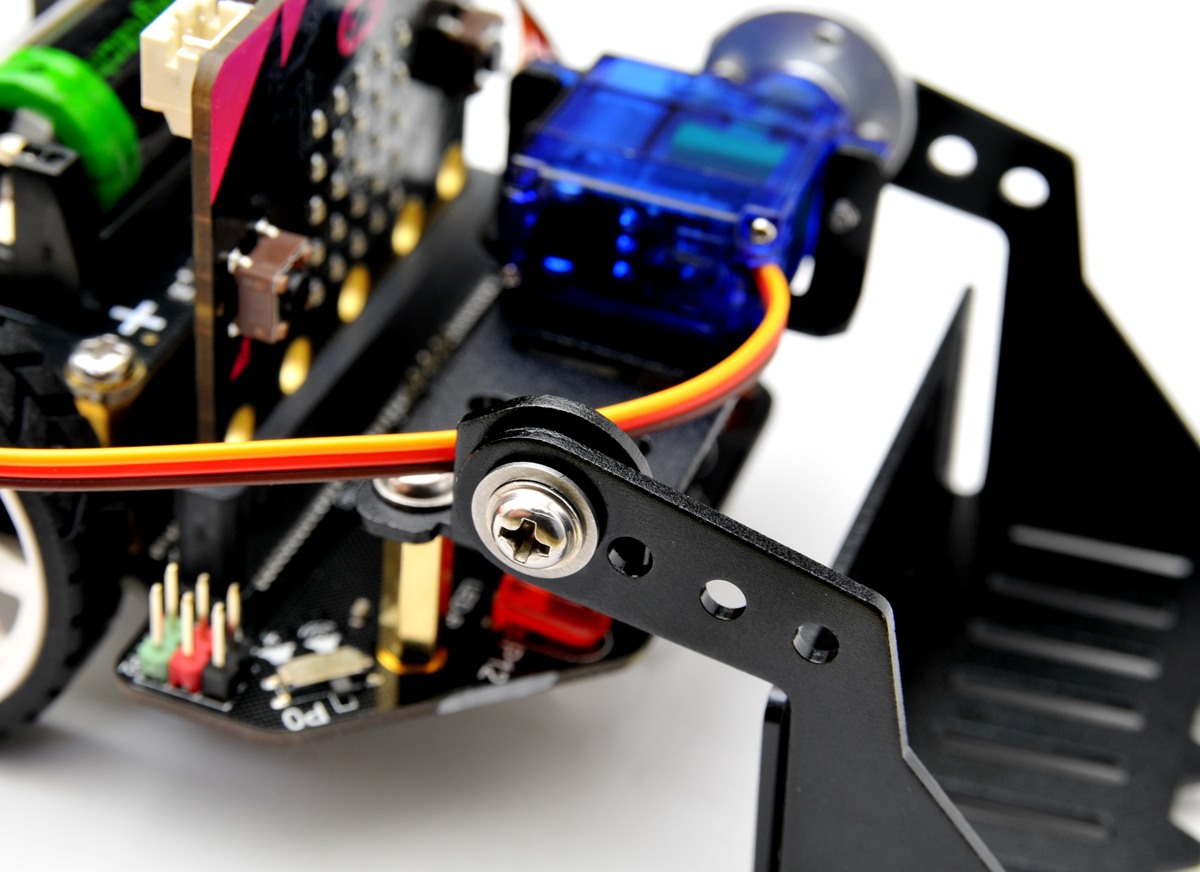
反対側のアームは、マウントプレートにネジ止め(1カ所)します。
完成です。micro:Maqueen V4.0の電源スイッチをオンにして、ショベル(バケット)が上下することを確認します。
5-13-3.デモ
micro:Maqueen V4.0 + Mechanic-Loaderのデモ走行です。
おすすめ品









