Maker Faire Kyoto 2020 online

Maker Faire Kyoto 2020の会場での開催が中止となり、代わりに誰でも、どこからでも、参加できるオンラインイベントとしてMaker Faire Kyoto 2020 onlineが開催されました。
Maker Faire Kyoto 2020 online
Maker Faire Kyoto 2020の中止
2020年5月2日~3日の2日間、京都府の「けいはんなオープンイノベーションセンター(KICK)」において、Maker Faire Kyoto 2020の開催が予定されていましたが、新型コロナウィルス(COVID-19)の感染拡大が続き、収束の見通しが立たないことから、会場での開催は中止となりました。
Maker Faire Kyoto 2020 onlineの開催
代わりに、Maker Faire Kyoto 2020 onlineが企画され、従来の事前申し込み・選考による出展ではなく、誰でも、どこからでも、参加できるオンラインイベントとなりました。開催は2020年5月2日のみ、作品の発表はTwitterによる投稿、ハッシュタグ「#MFKyoto2020」と「#作品発表」の二つをつけてツイートします。ただし、投稿が集中することを避けるため、タイムテーブルが設けられ、カテゴリーによる時間割が実験的に行われました。これには、さまざまなカテゴリーの作品を順番に見ているような様子を再現する意図もあったようです。
<タイムテーブル>
「Maker Faire Kyoto Online」開催概要
- 11:00:スタート(公式アカウントから開会のツイートを行います)
- 11:00-11:30:「キッズ」「教育」カテゴリー
- 11:30-12:00:「デザイン」「クラフト」「アート」カテゴリー
- 12:00-12:30:「FAB」「アシスティブテクノロジー」カテゴリー
- 12:30-13:30:「FOOD」(兼食事休憩、手作りランチの投稿も大歓迎!)
- 13:30-14:00:「モビリティ」カテゴリー
- 14:00-14:30:「ロボティクス」カテゴリー
- 14:30-15:30:「エレクトロニクス」カテゴリー
- 15:30-16:00:「ミュージック」カテゴリー ※ラストをぜひ盛り上げてください!
- 16:00:終了(公式アカウントから終了のツイートを行います)
作品発表
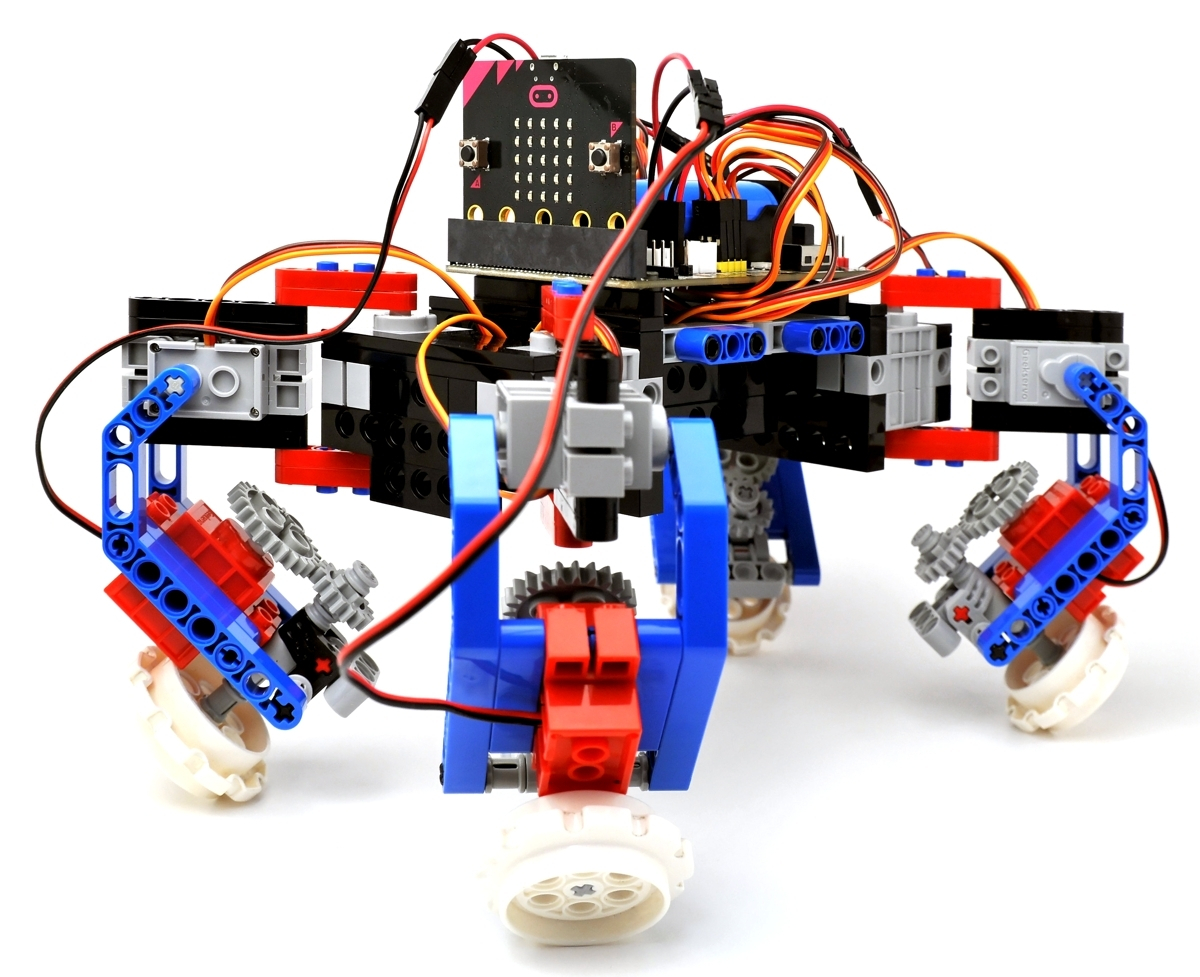
誰でも、どこからでも、参加できるということなので、サヌキテックネットも香川から作品を発表しました。発表した作品は、改良を重ねている「四脚歩行・四輪走行ロボット」の最新版です。LEGOで組み立てたこのロボットは、8つのサーボモーターで制御された四本の脚で歩く「歩行モード」と、4つのDCモーターで駆動するタイヤで走る「走行モード」にトランスフォームすることができます。
作品発表するカテゴリーは「ロボティクス」、タイムテーブルに従って14時になるのを待ちます・・・。待っている間に、デモ用のプログラムを新しくしました。ロボットの起動シーケンスを変更して、かわいく立ち上がります。
micro:bitで制御する四脚歩行・四輪走行ロボットです。トランスフォームして、歩行動作と走行動作を行います。歩行には8つのサーボモーター、走行には
— サヌキテックネット (@SanukiTechnet) May 2, 2020
4つのDCモーターを使用しています。ボディはLEGOで組み立てています。 #microbit #MFKyoto2020 #作品発表 #ロボティクスhttps://t.co/sFPUpHrLwe pic.twitter.com/Twa5lrPa9U
続いて、各関節(サーボモーター)の可動範囲を紹介する動画です。使用しているサーボモーターは、0度~270度まで指定できるものですが、構造上、可動範囲が制約されます。見かけ上の可動範囲は、第一関節が0度~135度、第二関節が0度~230度です。ただし、この最新型では、DCモーターを搭載しているため45度~230度までとなっています。
歩行用のサーボモーター(グレー)は、一脚あたり2つ使用しています。可動範囲は、第1関節が0度~135度、第二関節が0度~230度です。
— サヌキテックネット (@SanukiTechnet) May 2, 2020
#MFKyoto2020 #作品発表 #ロボティクスhttps://t.co/sFPUpHrLwe pic.twitter.com/9SWgACpzuD
走行モードの姿です。
micro:bitで制御する四脚歩行・四輪走行ロボット。走行モードの姿勢です。 #MFKyoto2020 #作品発表 #ロボティクスhttps://t.co/sFPUpHrLwe pic.twitter.com/VcbERH8wiB
— サヌキテックネット (@SanukiTechnet) May 2, 2020
ボディの上部に、micro:bitと拡張ボードを登載しています。この拡張ボード一枚で、8つのサーボモーターと4つのDCモーターを制御しています。
制御部分はボディの上部に設置しています。micro:bitと、8つのサーボモーター・4つのDCモーターが制御できる拡張ボードです。 #MFKyoto2020 #作品発表 #ロボティクスhttps://t.co/sFPUpHrLwe pic.twitter.com/hOgS8lHqRl
— サヌキテックネット (@SanukiTechnet) May 2, 2020
一脚当たり2つのサーボモーターを使用していますが、LEGOのパーツを使って、サーボモーターの出力軸(回転軸)が直交するように組み立てています。
歩行用のサーボモーター(グレー)は、一脚あたり2つ使用しています。LEGOのパーツを使って、サーボモーターの出力軸(回転軸)が直交するように組み合わせています。 #MFKyoto2020 #作品発表 #ロボティクスhttps://t.co/sFPUpHrLwe pic.twitter.com/01QborMVeL
— サヌキテックネット (@SanukiTechnet) May 2, 2020
走行モードで使用するDCモーターです。以前は、DCモーターの出力軸に直接タイヤを取り付けていましたが、最新版では、ギヤを使って、回転速度を1.5倍程度にスピードアップしています。先端の3つ穴が開いたブロックは、歩行モード時にタイヤを保護するためのものです。
走行用のDCモーター(レッド)は、一脚あたり1つ使用して、タイヤを取り付けています。大小のギアで、回転速度を1.5倍程度にあげています。 #MFKyoto2020 #作品発表 #ロボティクスhttps://t.co/sFPUpHrLwe pic.twitter.com/CeFsoNa7ZE
— サヌキテックネット (@SanukiTechnet) May 2, 2020
最後に、四脚歩行ロボット(歩行のみ)の組み立て方の記事を紹介して終了です。いいね・リツイートしてくださったみなさま、ありがとうございました。
四脚歩行ロボットの組み立て方はこちらで紹介しています。 #MFKyoto2020 #作品発表 #ロボティクスhttps://t.co/sFPUpHrLwe pic.twitter.com/dxcblIQAjk
— サヌキテックネット (@SanukiTechnet) May 2, 2020
作品発表ツイートのまとめ
toggeterで、作品発表ツイートがカテゴリーごとにまとめられています。こうやって、イベントが終わった後でも作品がゆっくり見られるのはオンラインの魅力かもしれませんね。
- 「キッズ」「教育」カテゴリー:https://togetter.com/li/1502058
- 「デザイン」「クラフト」「アート」カテゴリー:https://togetter.com/li/1502060
- 「FAB」「アシスティブテクノロジー」カテゴリー:https://togetter.com/li/1502062
- 「FOOD」カテゴリー:https://togetter.com/li/1502063
- 「モビリティ」カテゴリー:https://togetter.com/li/1502067
- 「ロボティクス」カテゴリー:https://togetter.com/li/1502068
- 「エレクトロニクス」カテゴリー:https://togetter.com/li/1502069
- 「ミュージック」カテゴリー:https://togetter.com/li/1502070
- 「感染予防DIY」カテゴリー:https://togetter.com/li/1502071
- 「在宅勤務DIY」カテゴリー:https://togetter.com/li/1502072










