micro:Maqueen V3.0【組み立て編】

独立した二つの駆動輪を持つSTEM教育用のグラフィカルプログラミングロボット「micro:Maqueen V3.0」の組み立て方を解説します。
5-2-1.micro:Maqueen V3.0の紹介
DFROBOTのmicro:Maqueen V3.0(マイクロマックイーン V3.0)は、独立した二つの駆動輪を持つSTEM教育用のグラフィカルプログラミングロボットです。別売りのmicro:bitを搭載することで、駆動輪などをプログラミングで制御することができます。
電源電圧は3.5V~5Vで、通常は単四型乾電池×3本を使用します。また、オプションの電源管理モジュール(リチウムイオン電池ホルダー)を取り付けることで、充電式のリチウムイオン電池(RCR123A)×1本で動作します。

micro:Maqueenに搭載されているデバイスやセンサーは「付録3-12.micro:Maqueen V3.0」で詳しく紹介しています。



5-2-2.micro:Maqueenの組み立て
組み立てに工具は不要です。
タイヤの組み立て
タイヤとホイールを袋から取り出し、組み立てます。

タイヤの凸部とホイールの凹部を合わせます。タイヤとホイールが滑ったり、外れたりしないように工夫されています。

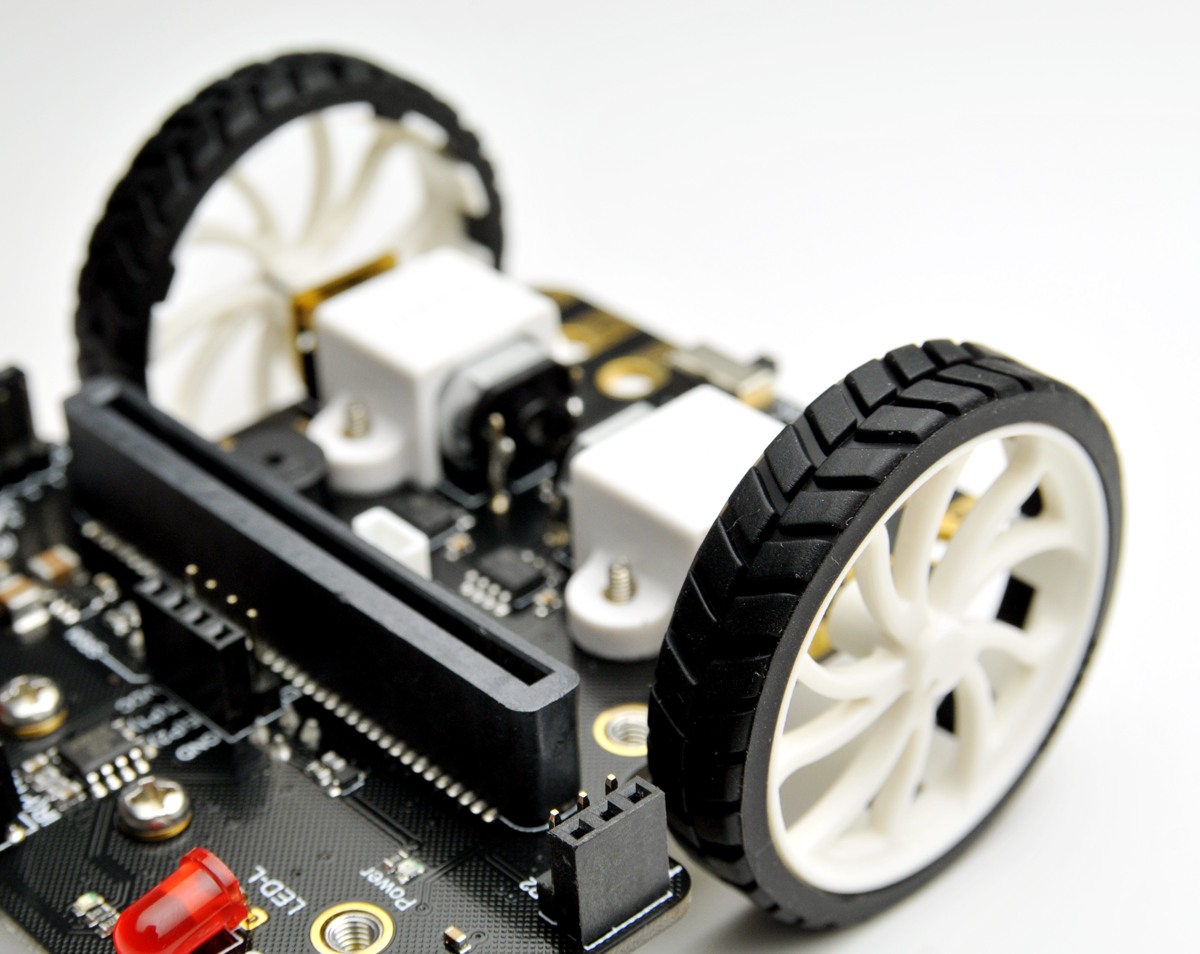
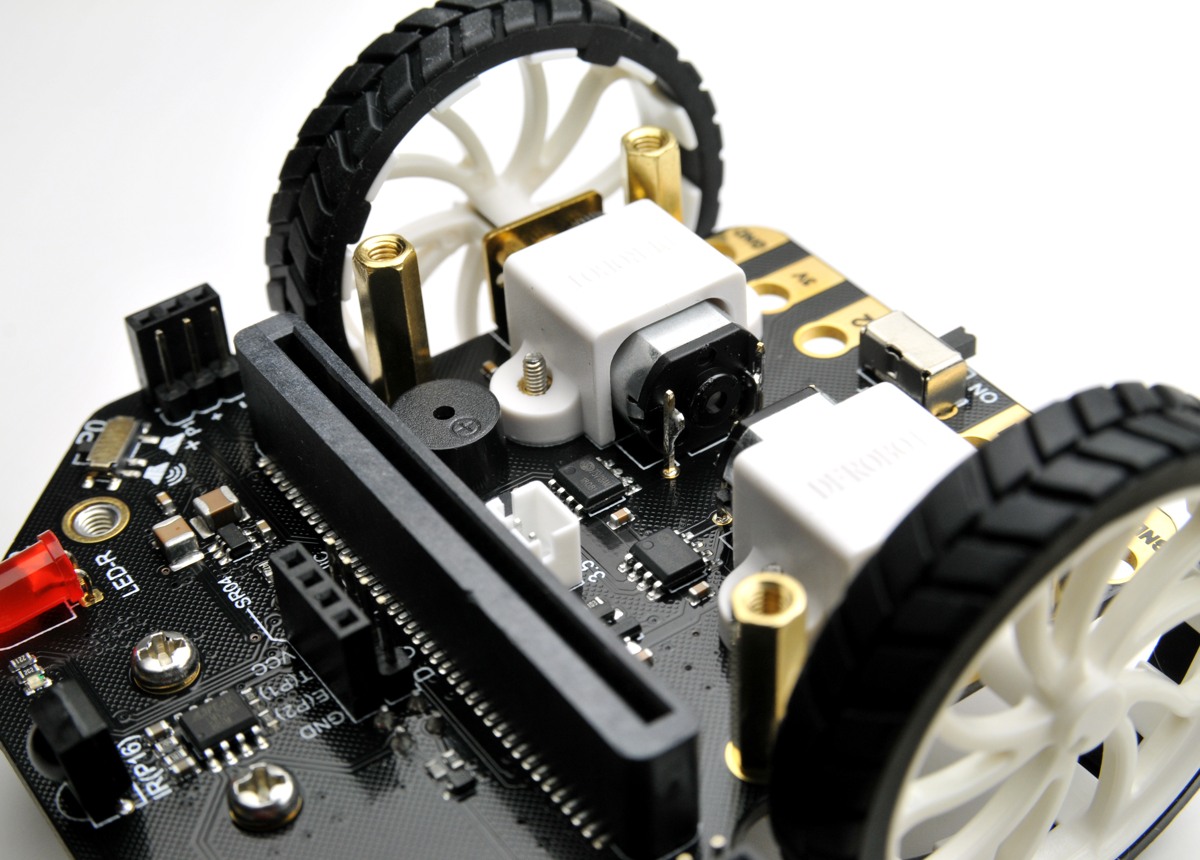
タイヤの取り付け
シャーシ(基板)上のモーター(2個)にタイヤを取り付けます。モーターの軸は一部が平らになったDカット軸です。タイヤ側の軸穴の平らな面を合わせて押し込みます。左右の違いはありません。
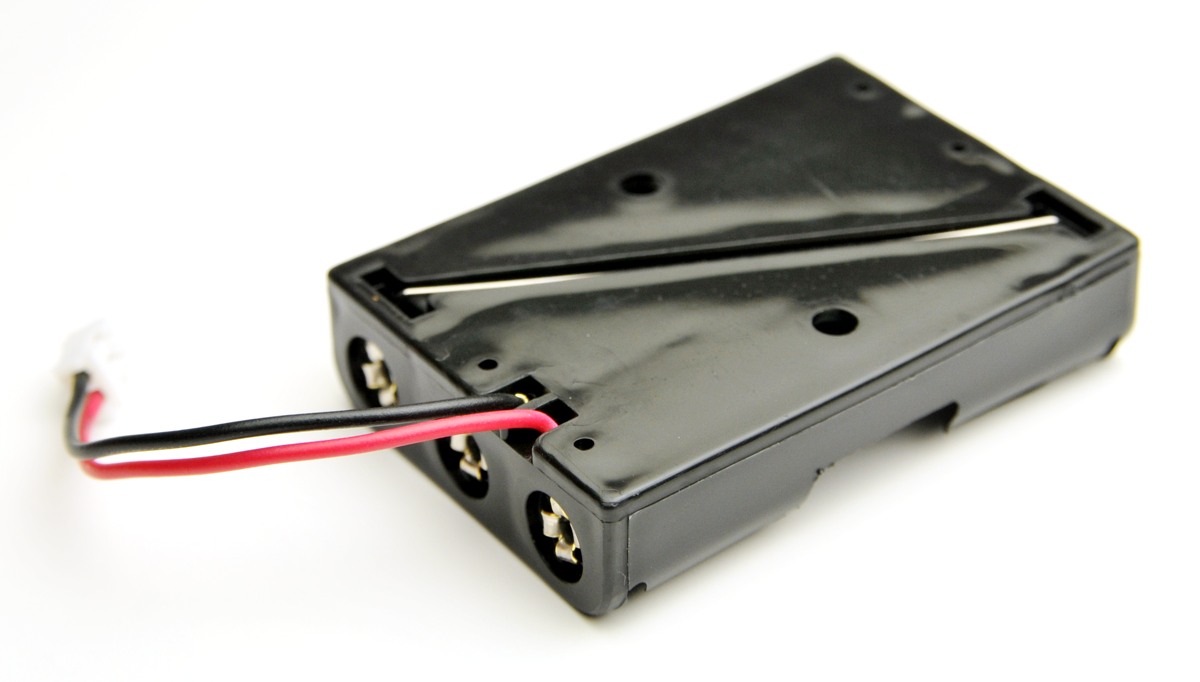
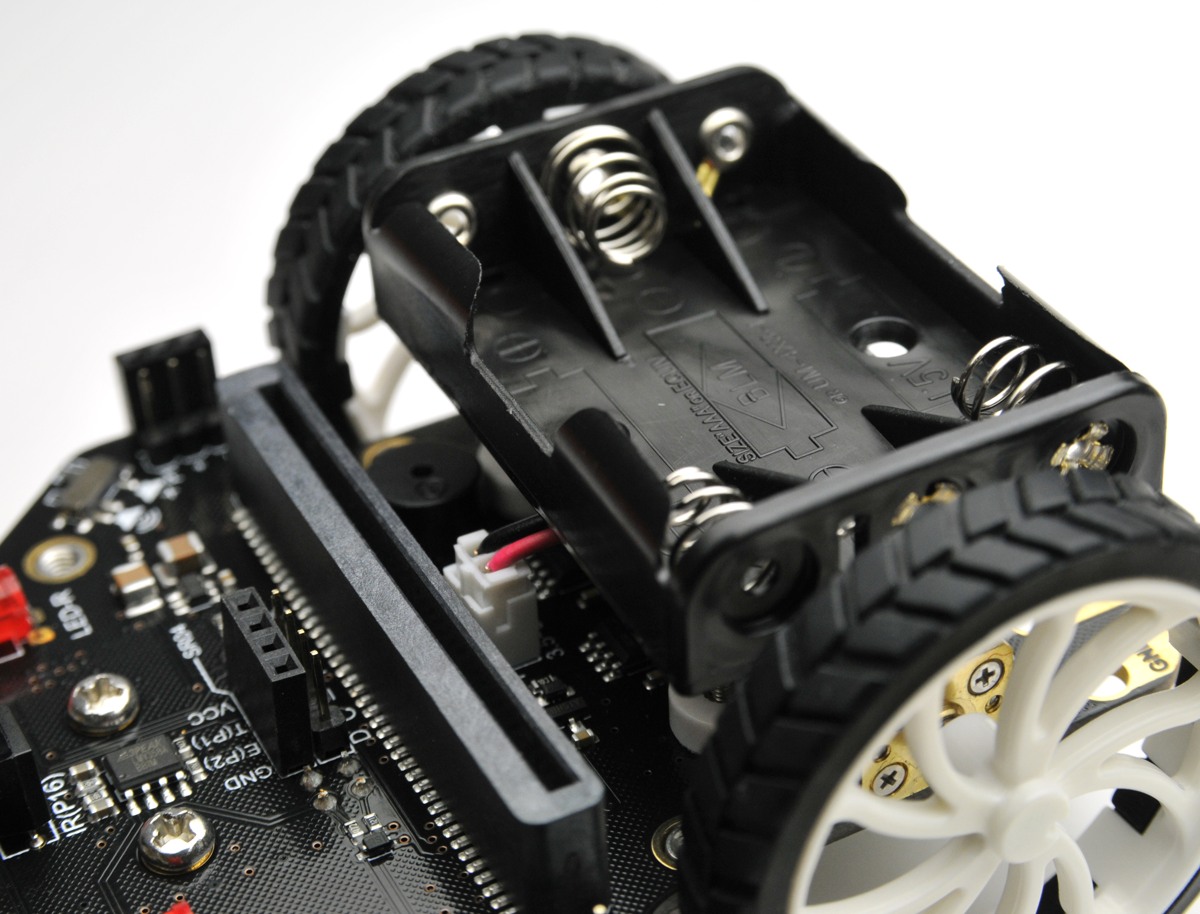
電池ボックスの取り付け
電池ボックスのリード線を外側に軽く曲げます。
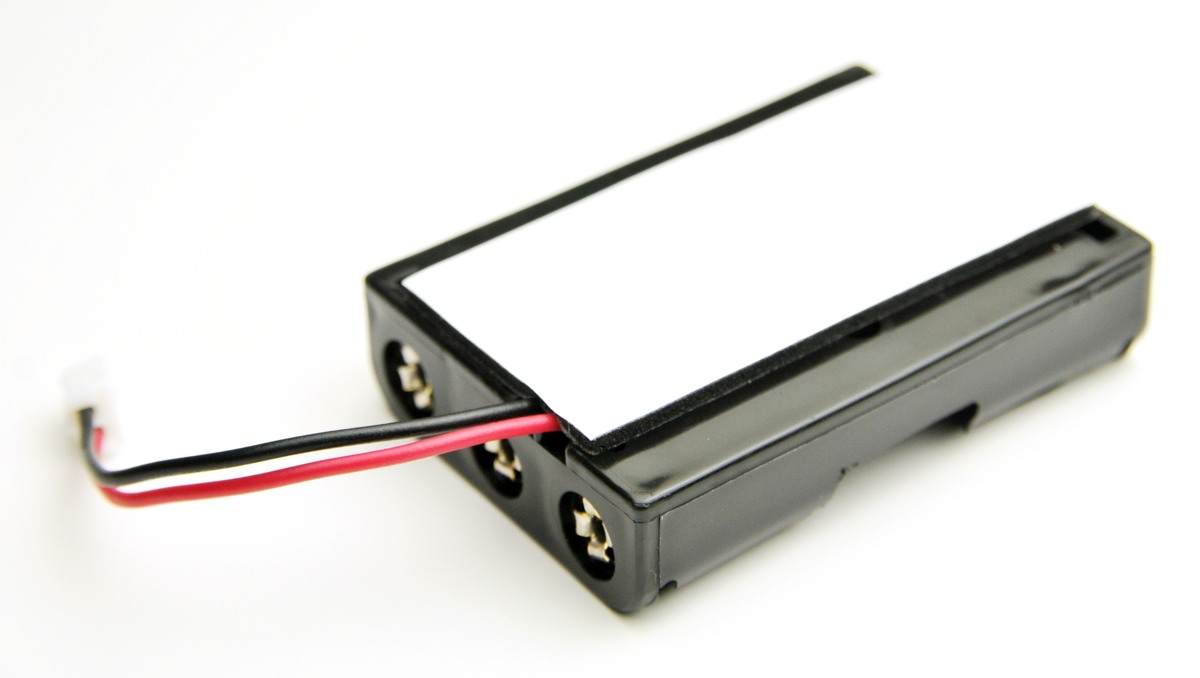
図のように付属の両面テープを貼ります。
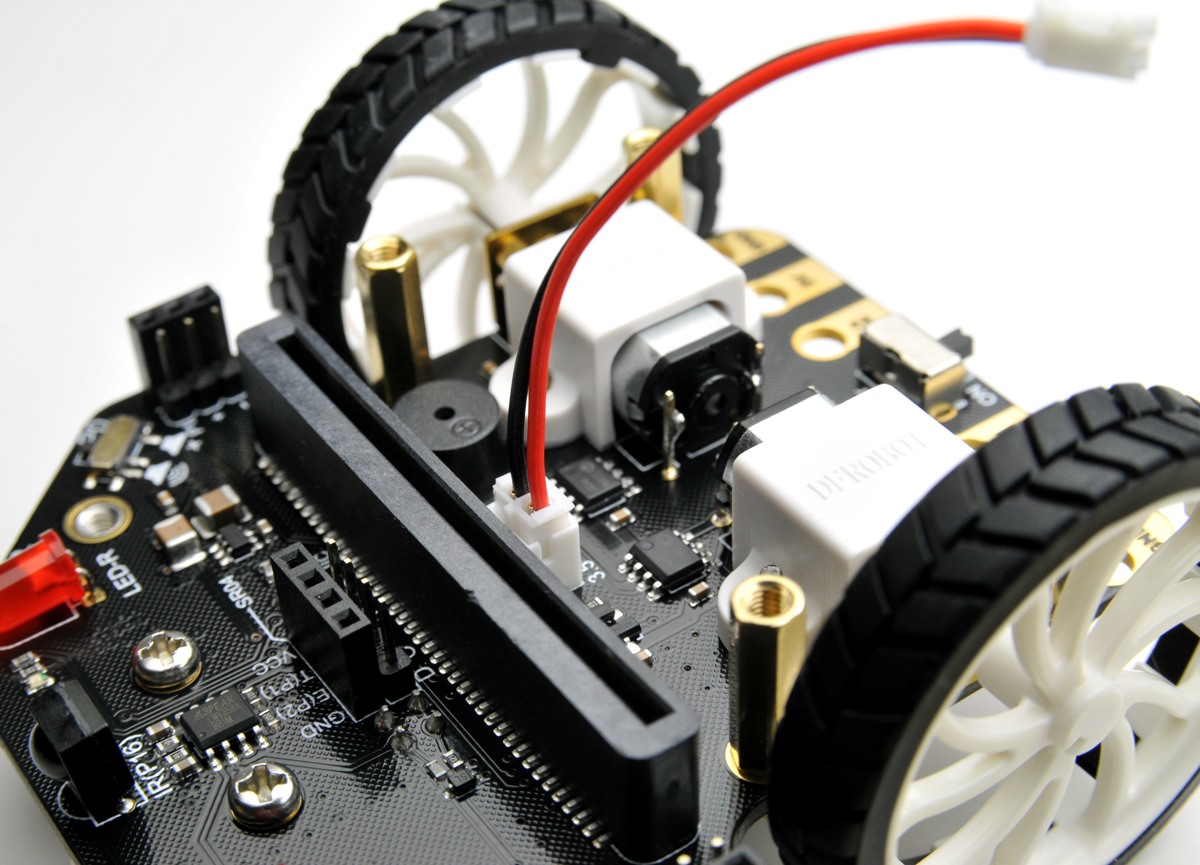
リード線の先についたプラグをシャーシ(基板)の「3.5-5.0V」と書かれたソケットに差し込みます。向きがあるので注意します。
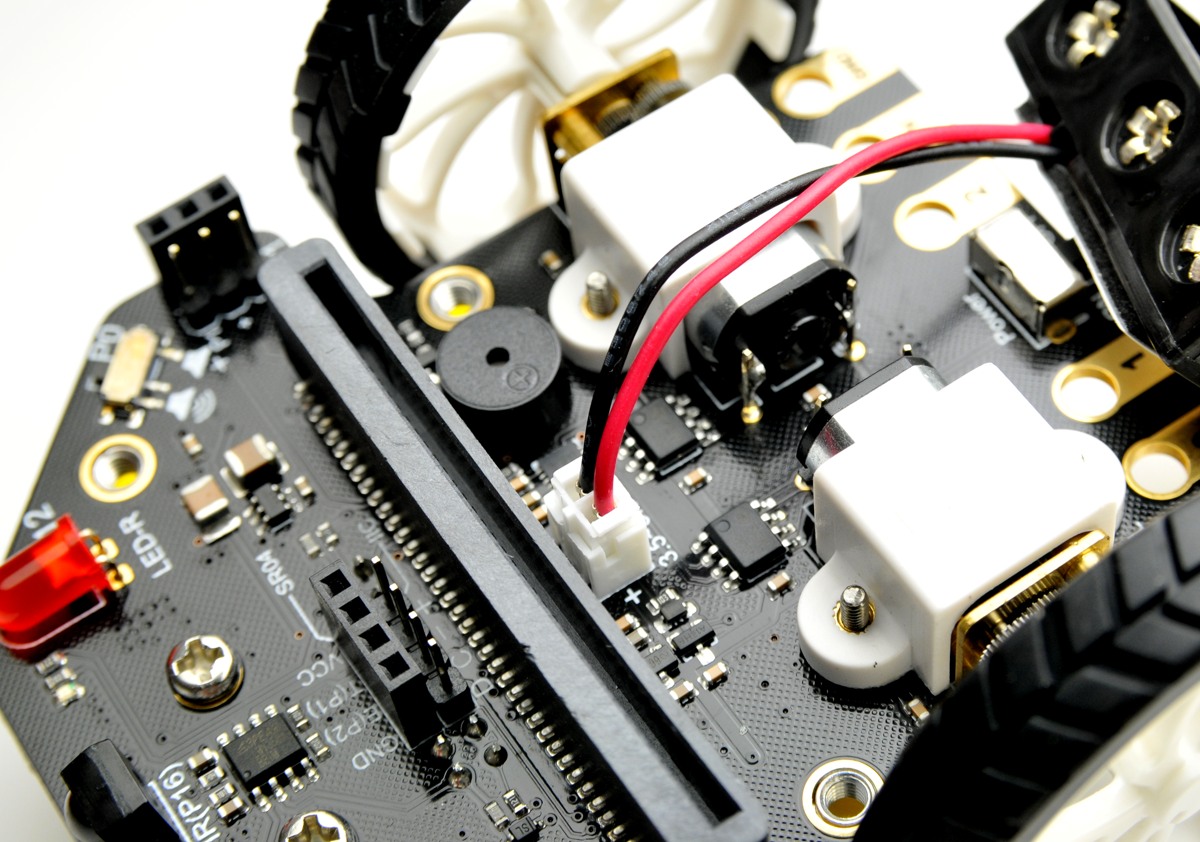
左右のモーターの間にリード線を通し、電池ボックスをモーターの上に貼り付けます。
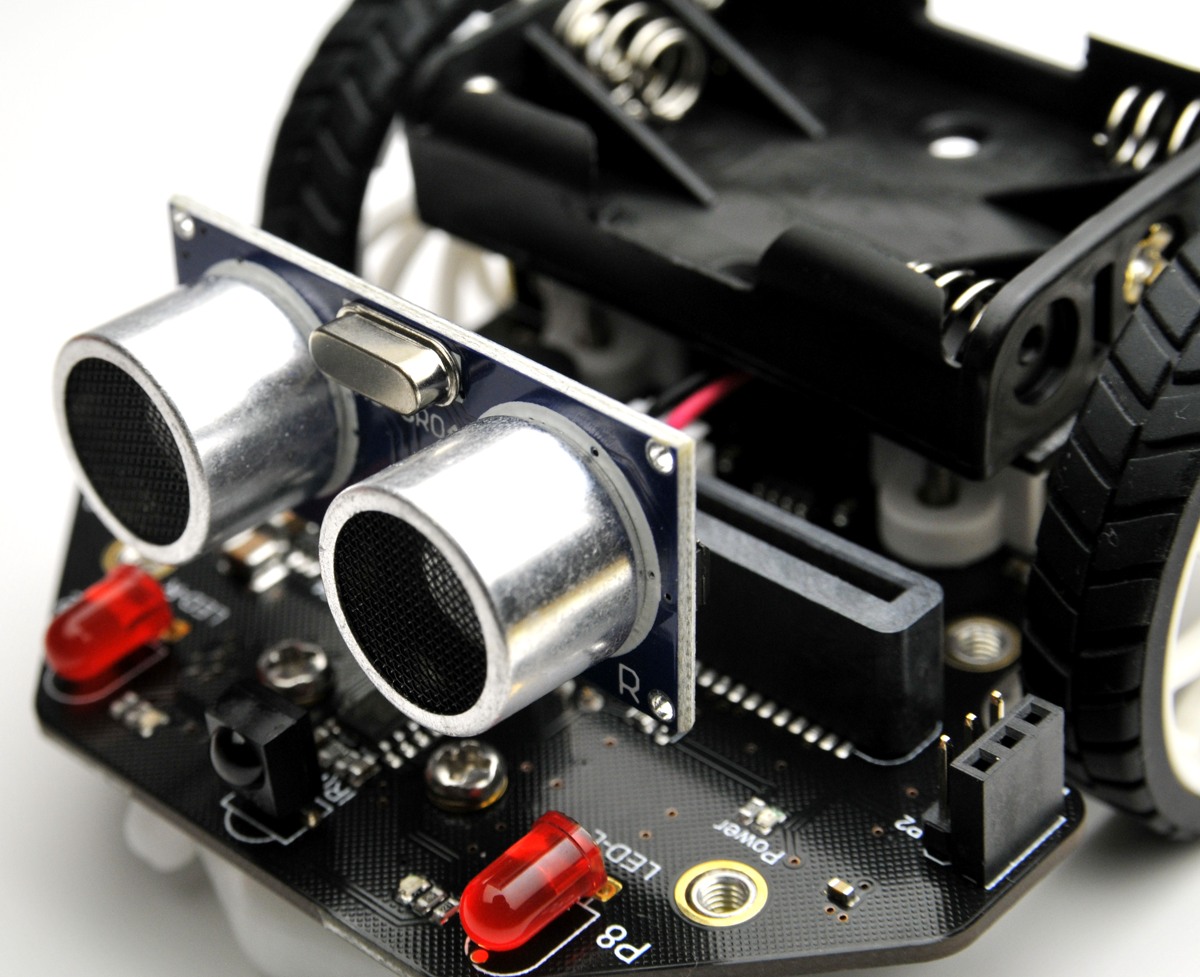
超音波センサーの取り付け
超音波センサーをシャーシ(基板)上の「SR04」と書かれたソケットに差し込みます。
完成
シャーシ(基板)の上部にあるコネクタへmicro:bitを差し込んで完成です。
プログラミング
完成したらプログラミングを楽しみましょう。
5-2-3.電源管理モジュールの取り付け(オプション)
オプション(別売り)で用意されている電源管理モジュールの取り付け方法を解説します。電源管理モジュールの取り付けには、プラスドライバーが必要です。
電池ボックスの取り外し
左右のモーターの上に電池ボックスを取り付けている場合は外します。
電源管理モジュールの取り付け
電源管理モジュールに付属の支柱(4本)を取り付けます。一旦、タイヤを取り外したほうが取り付けやすくなります。
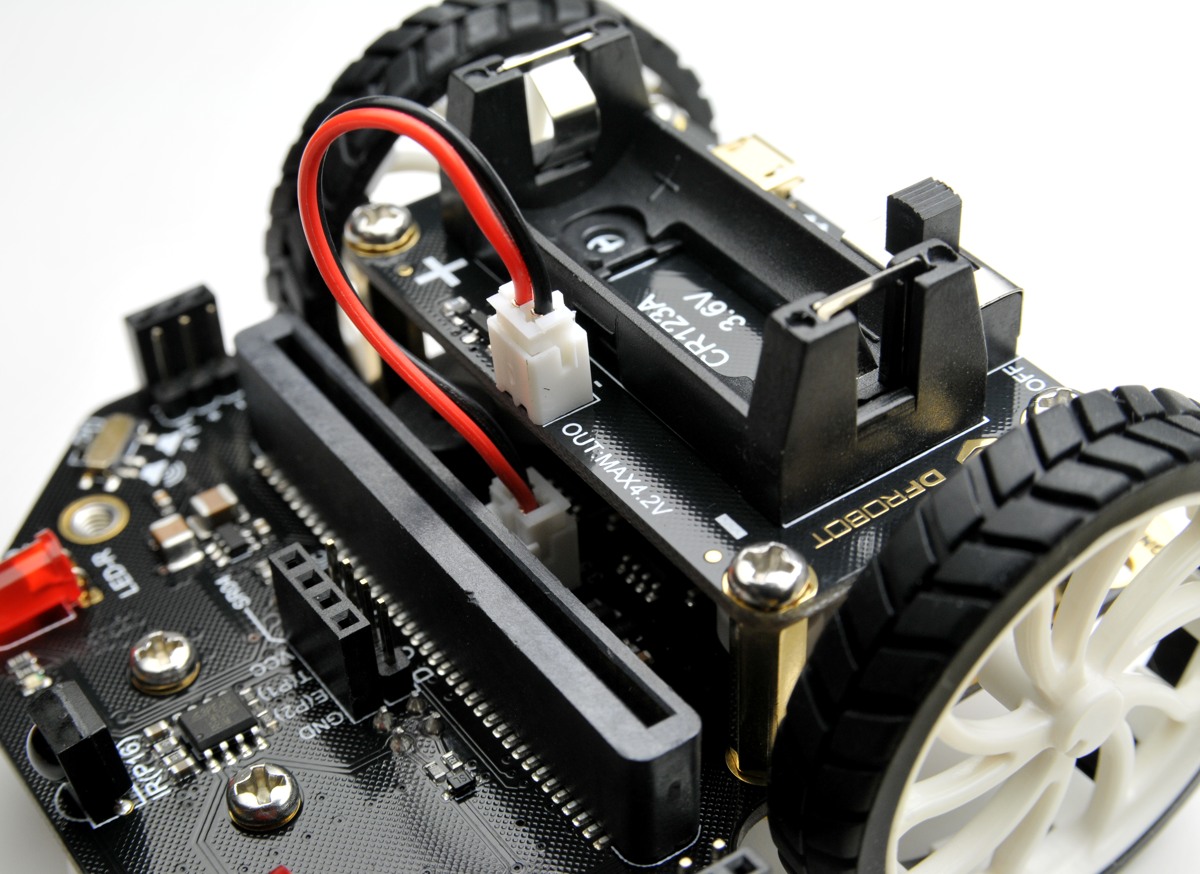
付属のリード線を「3.5-5.0V」と書かれたソケットに差し込みます。
付属のネジ(4本)で電源管理モジュールを取り付けます。
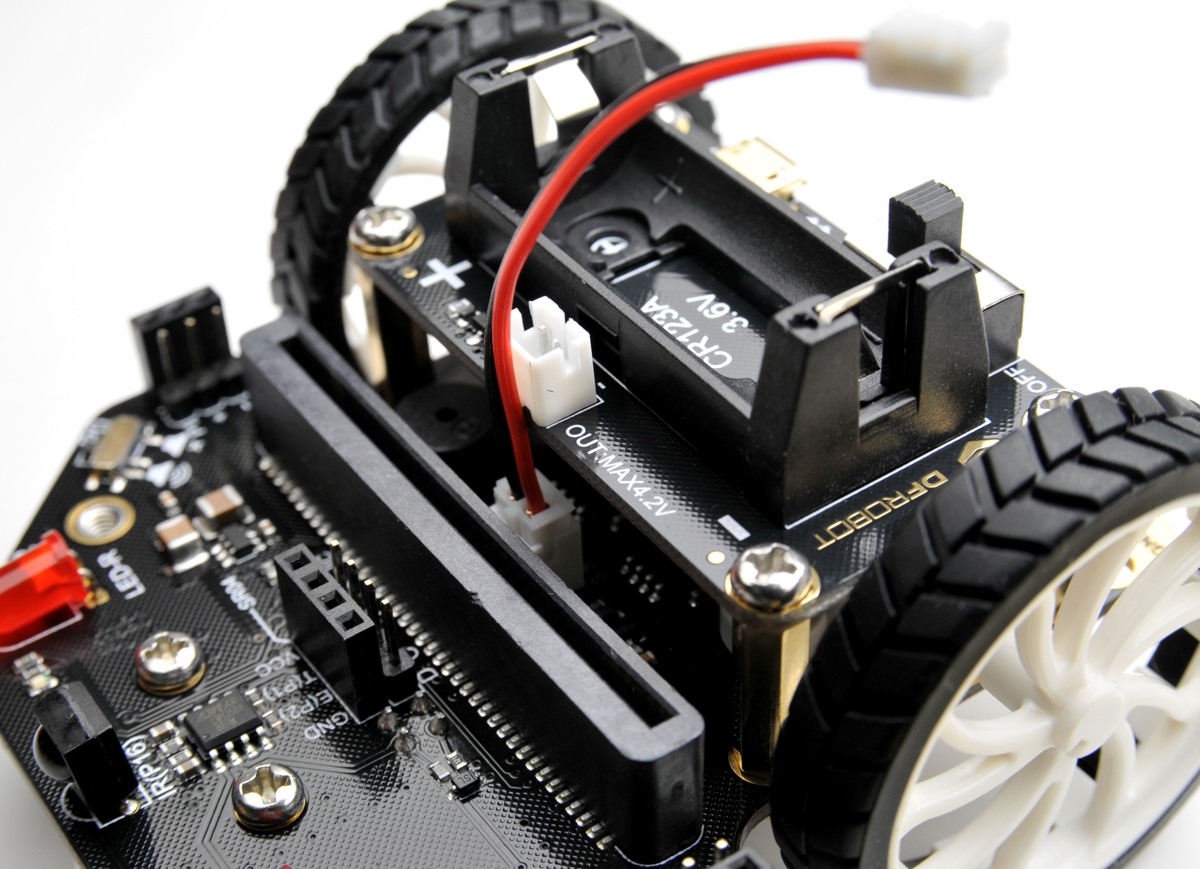
リード線を電源管理モジュールのソケットに差し込みます。以上で完了です。
おすすめ品










