GeekservoとLEGOの接続例(その2)

Geekservo(270度サーボモーター)をLEGOと接続する方法を紹介します。紹介するのは「出力軸を中心にする接続」と「強度を高める接続(抜け防止)」の二つです。
11-11-1.出力軸を中心にする接続
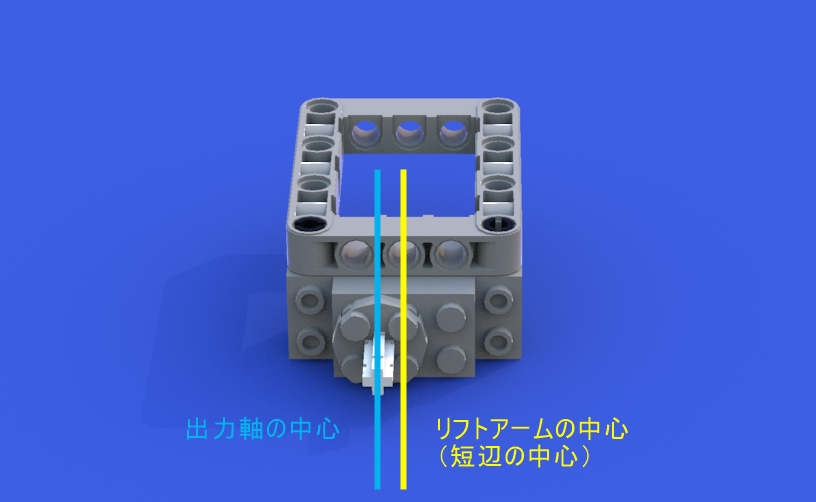
ギアを使って、270度サーボモーターの出力軸を「リフトアーム 5x7 オープンセンター」の中心へ移動して、ズレをなくする方法です。
準備するパーツ
組み立てに必要なLEGOブロックのパーツと270度サーボモーター(1個)です。
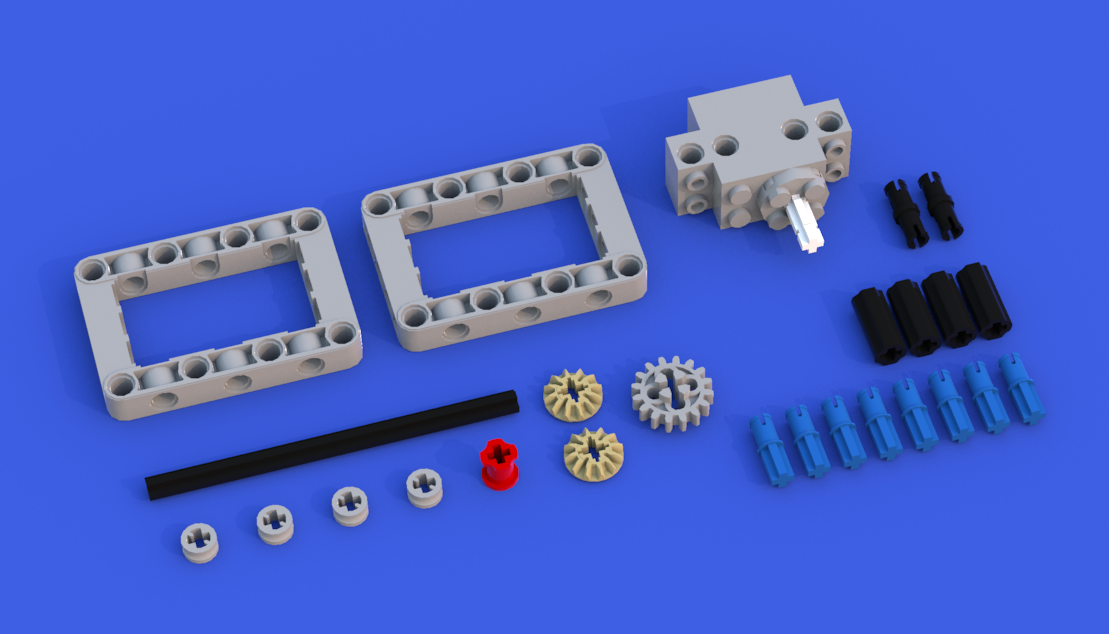
LEGOブロックのパーツリストです。
| エレメントID | パーツ名(カラー) | 個数 |
|---|---|---|
| 4539880 | リフトアーム 5x7 オープンセンター(グレー) | 2 |
| 4562487 | ギア 16歯(グレー) | 1 |
| 4565452 | べベルギア 12歯(タン) | 2 |
| 373726 | 10M 十字軸 79mm(ブラック) | 1 |
| 4121715 | コネクターペグ 滑り止め(ブラック) | 2 |
| 4211573 | ブッシュ 1/2(グレー) | 4 |
| 4227155 | ブッシュ(レッド) | 1 |
| 4206482 | 軸-コネクターペグ(ブルー) | 8 |
| 4512363 | 軸コネクター(ブラック) | 4 |
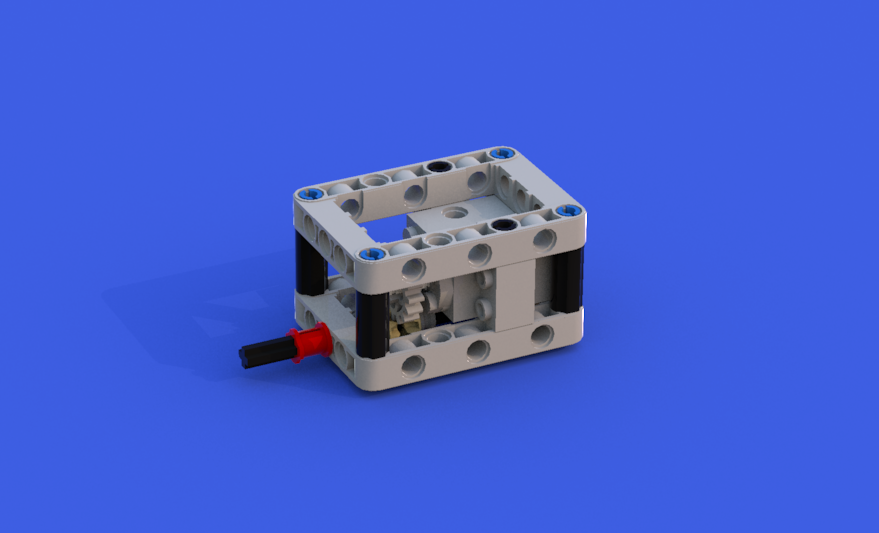
組み立て手順
「11-10.GeekservoとLEGOの接続例(その1)」で紹介した「出力軸を中心にする接続」の組み立て手順と同じです。
使用例
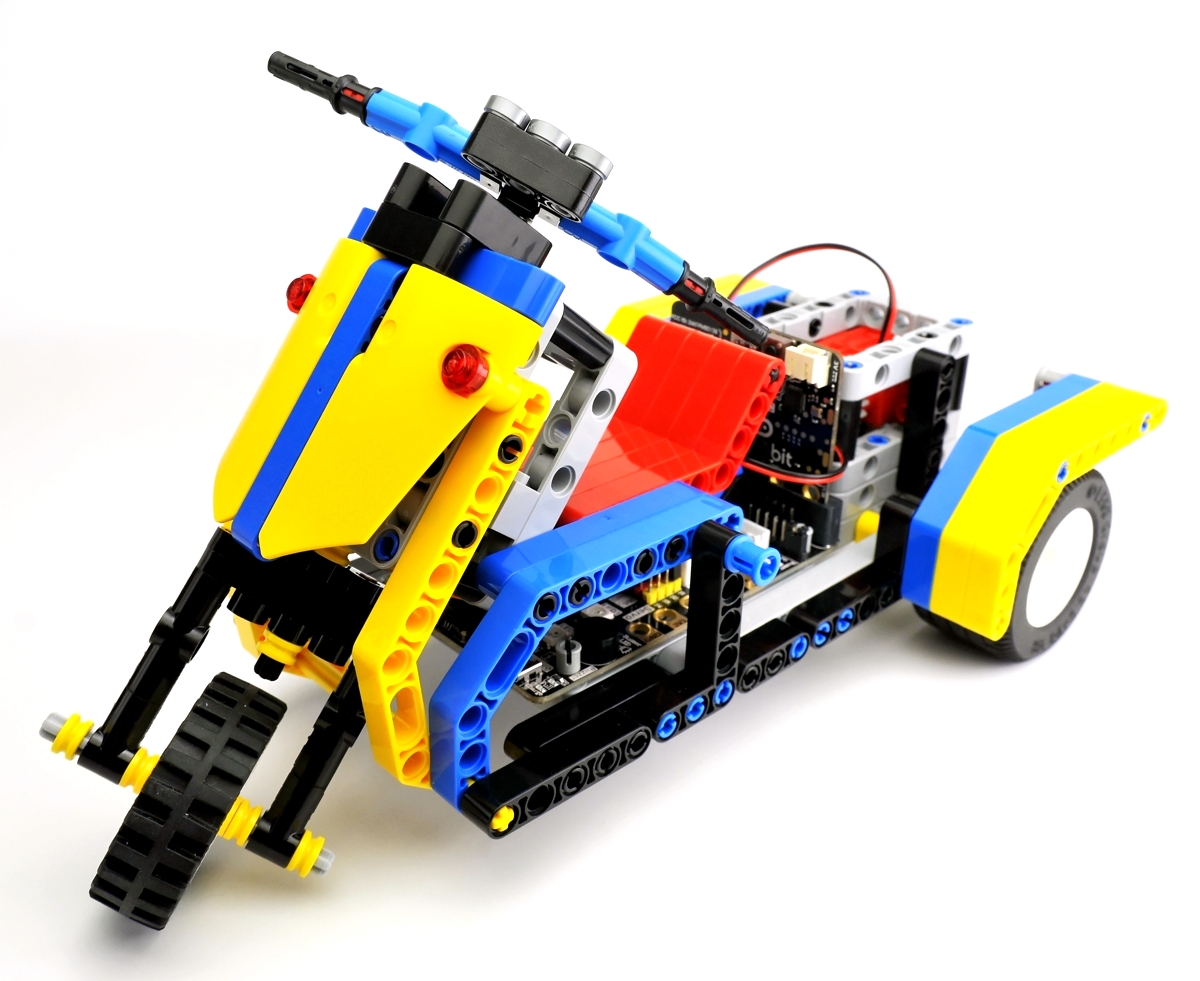
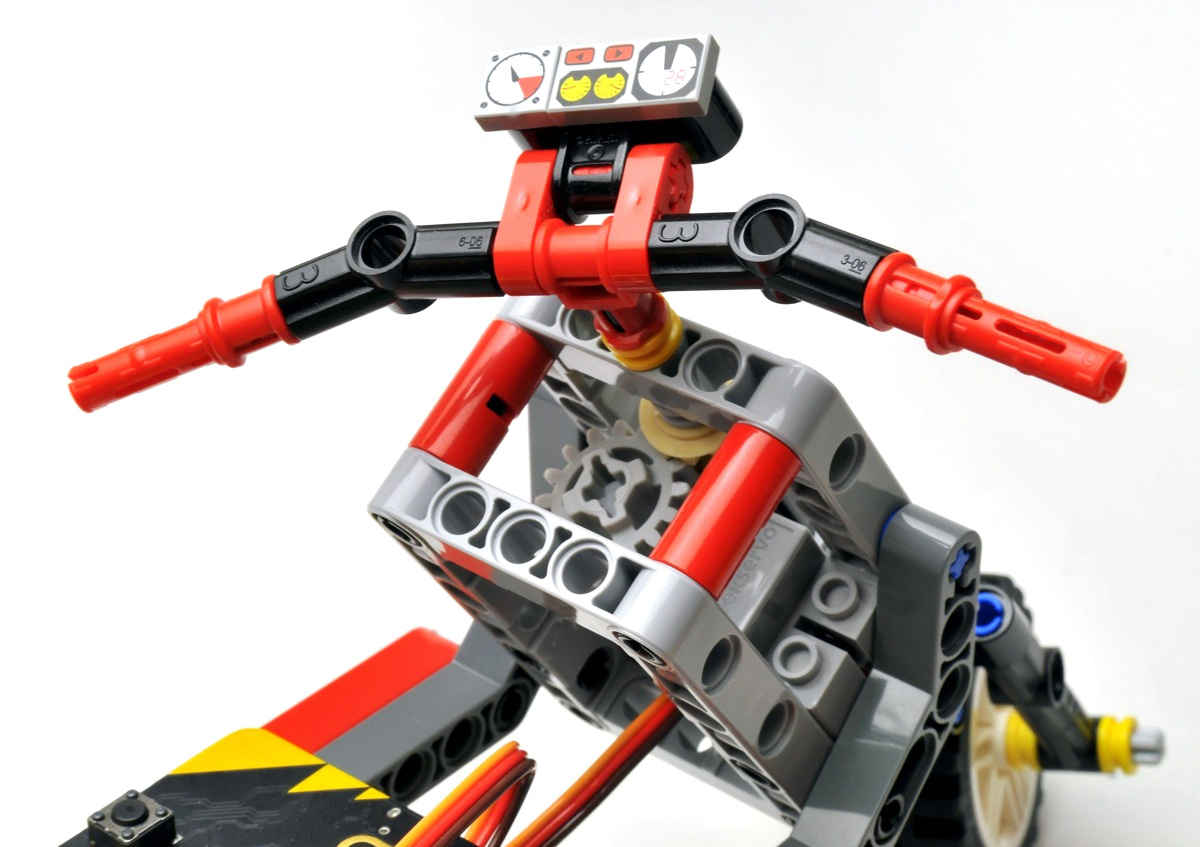
出力軸の回転角を制御できるので、ステアリング機構として利用できます。

三輪バイク(トライク)のステアリングとして応用した例です。組み立て方法は「11-3.LEGO三輪バイクを操縦する」で紹介しています。
micro:bit用ワークショップモジュールをLEGOにマウントする「ワークショップモジュールLEGOマウンター」と組み合わせた例です。後輪は「11-10.GeekservoとLEGOの接続例(その1)」で紹介した「出力軸を中心にする接続」を使用しています。

11-11-2.強度を高める接続(抜け防止)
270度サーボモーターを、ロボットの関節として使用する場合に、出力軸からLEGOパーツが抜け落ちないように、接続の強度を高める方法です。
準備するパーツ
組み立てに必要なLEGOブロックのパーツと270度サーボモーター(1個)です。
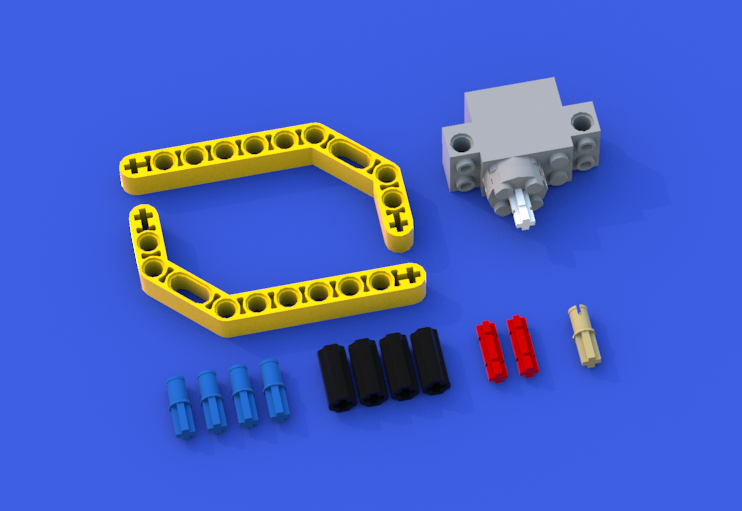
LEGOブロックのパーツリストです。
| エレメントID | パーツ名(カラー) | 個数 |
|---|---|---|
| 4539880 | リフトアーム 1 x 11.5 ダブルベント(イエロー) | 2 |
| 4666579 | 軸-コネクターペグ(タン) | 1 |
| 4206482 | 軸-コネクターペグ(ブルー) | 4 |
| 4512363 | 軸コネクター(ブラック) | 4 |
| 4142865 | 2M 十字軸 15mm(レッド) | 2 |
組み立て手順
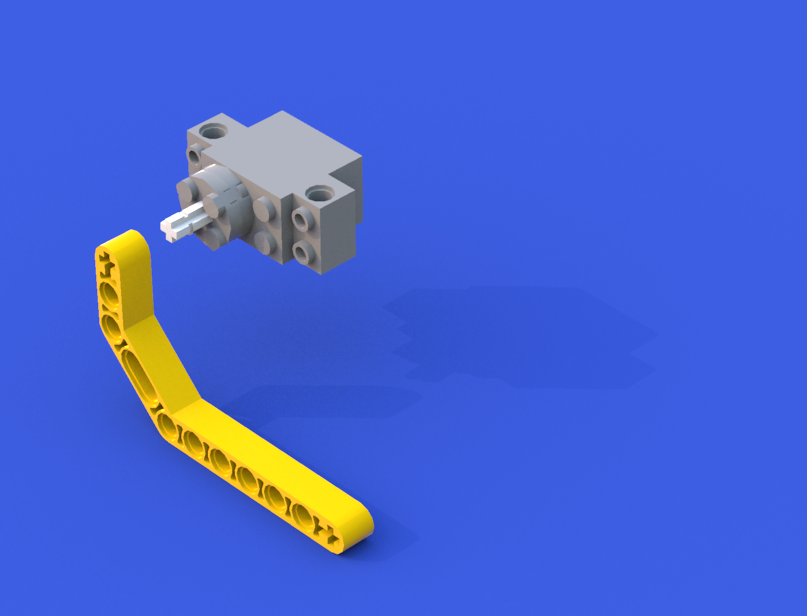
270度サーボモーターの出力軸に「リフトアーム 1 x 11.5 ダブルベント」を差し込みます。
ブリッジ部分を組み立てます。
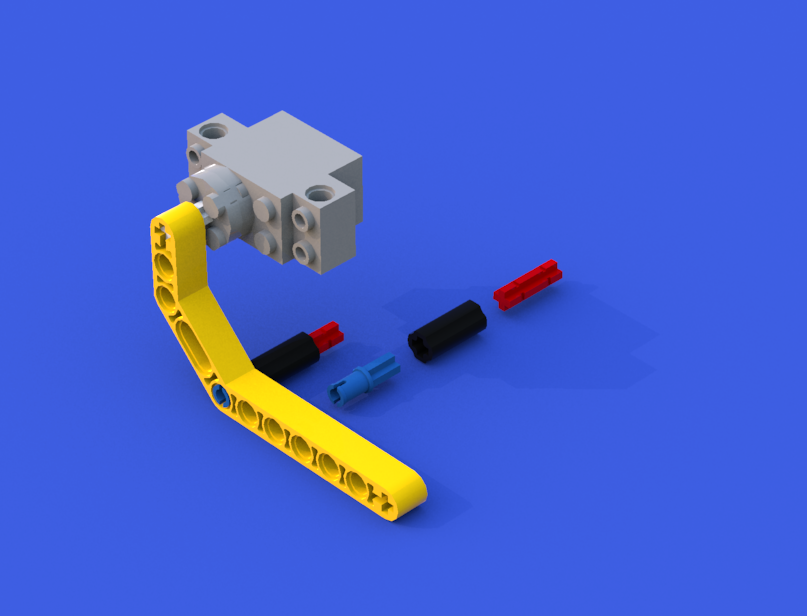
ブリッジ部分を延長します。
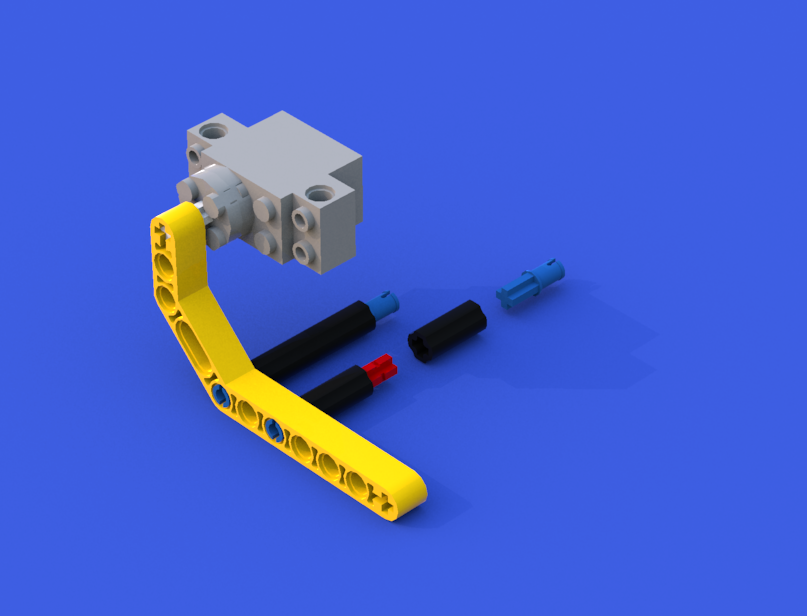
「リフトアーム 1 x 11.5 ダブルベント」に「軸-コネクターペグ」を差し込みます。270度サーボモーターの出力軸と反対の面にある穴に差し込みます。
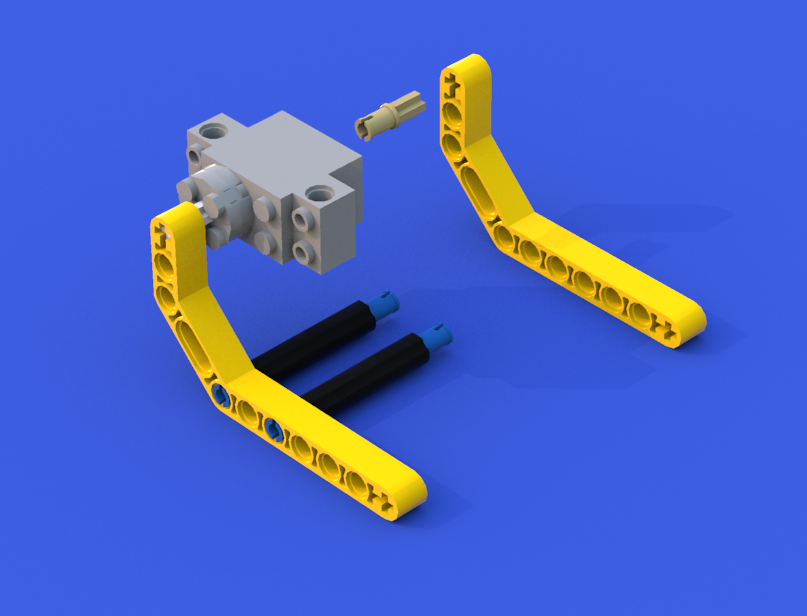
以上で、完成です。

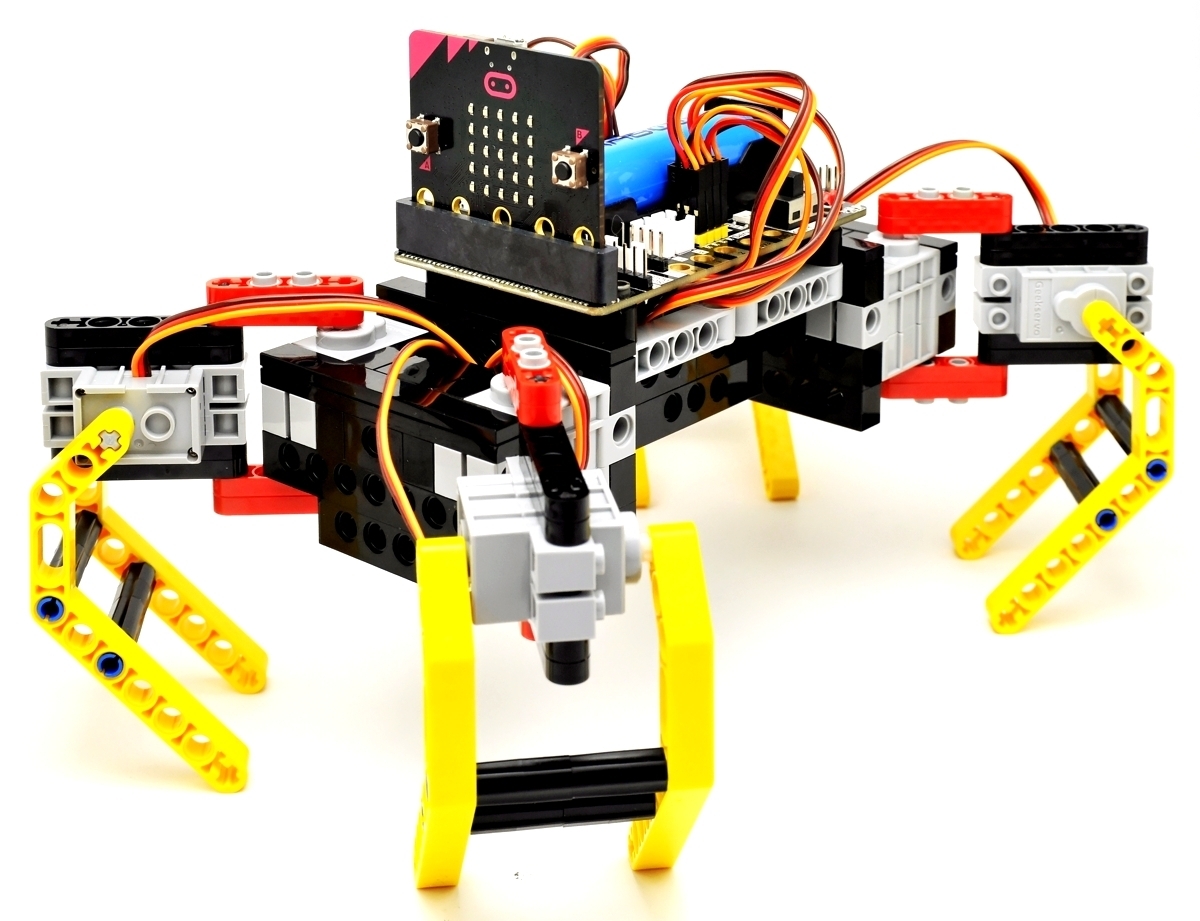
使用例
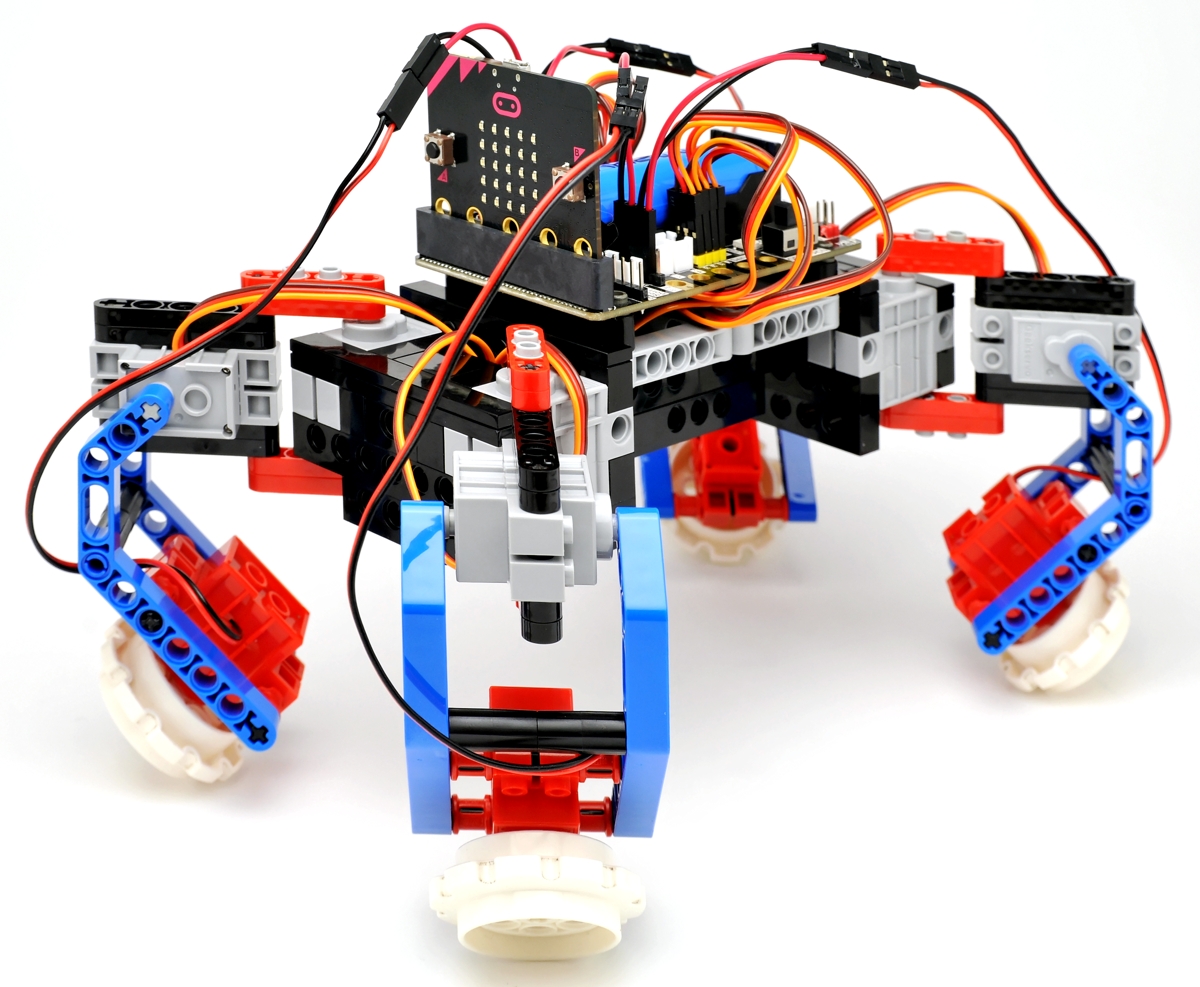
270度サーボモーターを8個使った四脚ロボットです。組み立て方法は「11-7.LEGO四脚ロボット(8サーボ型)」で紹介しています。
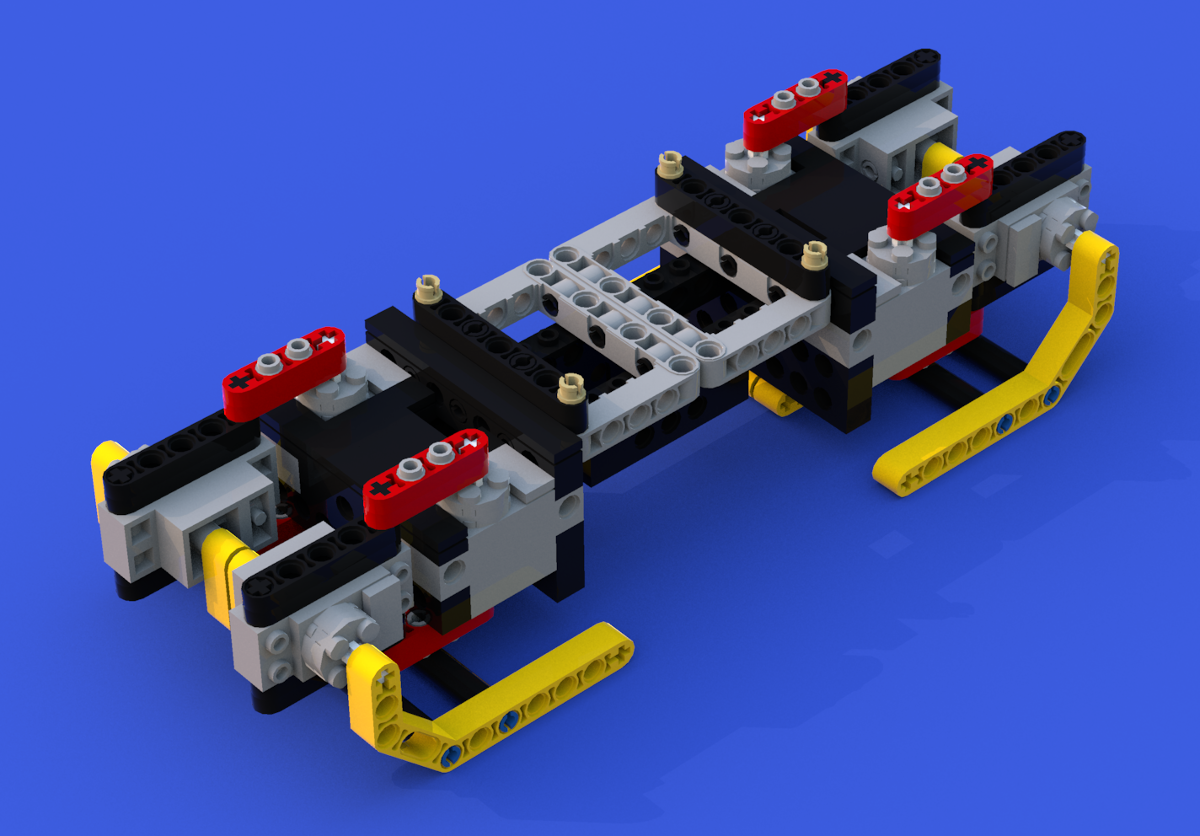
さらに、DCモーターを4個追加して、トランスフォームする四脚歩行・四輪走行ロボットです。
おすすめ品




レゴブースト クリエイティブ・ボックス
5種類の中から好きなものを組み立て、簡単なコードでタブレットを使いコントロールしよう!Bluetoothがついたレゴムーブハブ、相互に作用し合うモーターと色&距離センサーが含まれています。



The LEGO Technic Idea Book: Wheeled Wonders
テクニックシリーズのパーツを使った車・トラック・オートバイなどの作品を収録したペーパーブックです。










