プロットカー
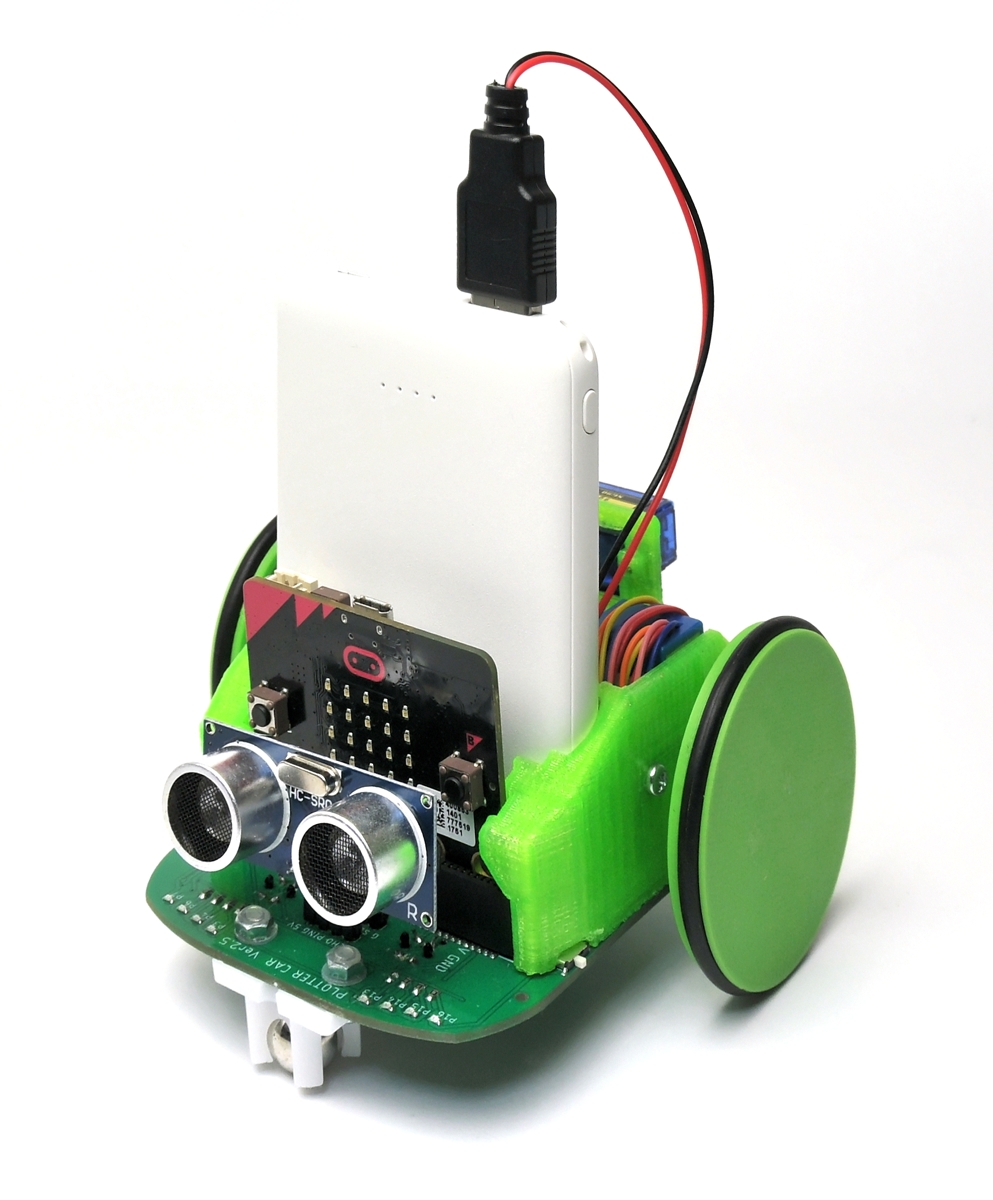
ユーレカ工房のプロットカーを紹介します。プロットカーは、micro:bitを搭載したSTEM教育用のプログラミングカーで、本体に搭載したペンを使って、紙の上に図形を描くことができます。
1.プロットカーとは
プロットカーとは
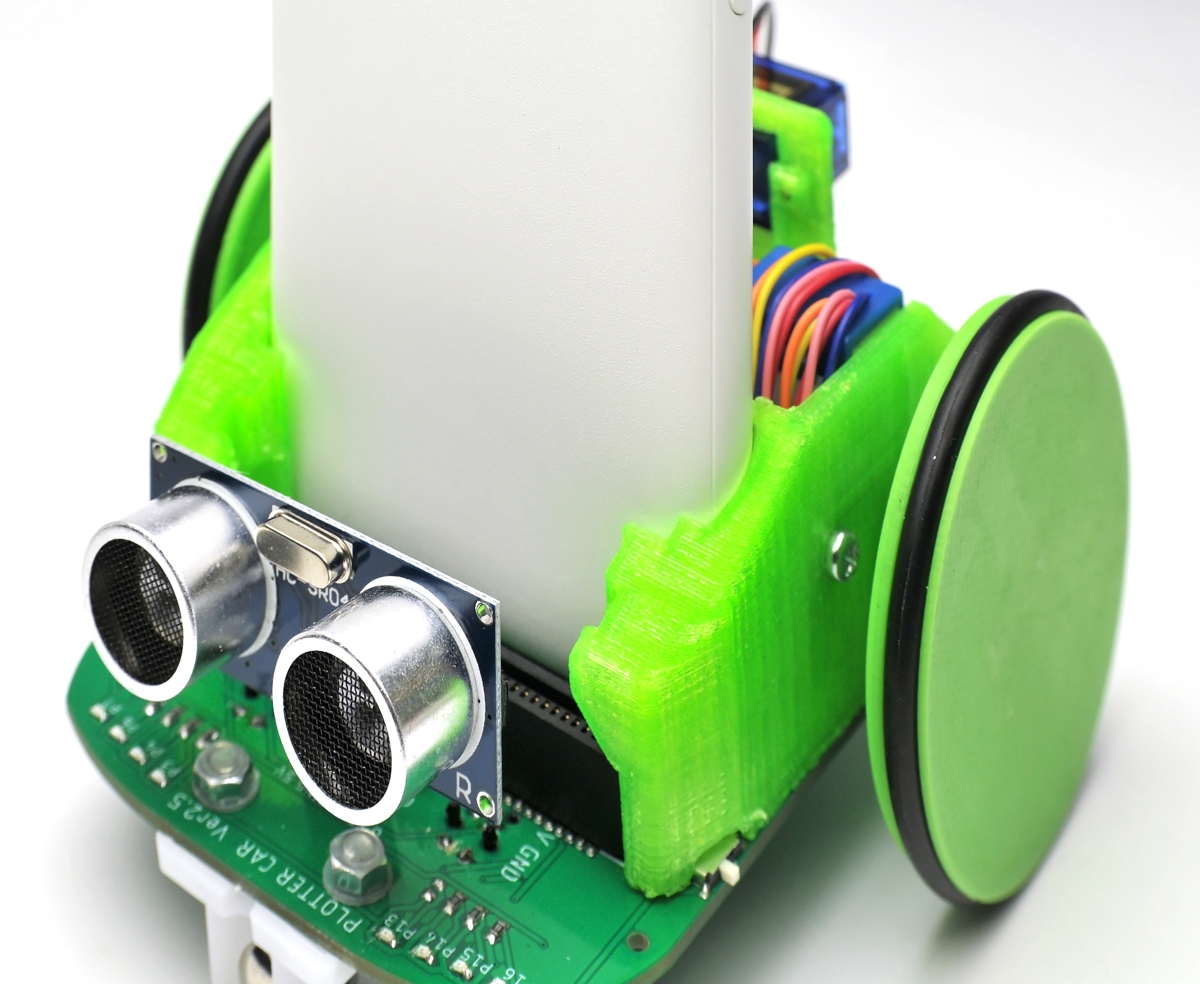
ユーレカ工房のプロットカーは、その名の通り「描画する(plot)車(car)」という意味で、micro:bitという教育用の小型コンピューターボードを搭載したSTEM教育用のプログラミングカーです。独立した二つの駆動輪と描画用のペンを搭載しているので、紙の上を走行すると、その移動した軌跡が線となって現れます。プログラムで二つの駆動輪をそれぞれ制御することで、さまざまな図形をペンで描くことができます。
また、micro:bitのビジュアルプログラミング環境用に、プロットカーを操作する専用の拡張ブロックが用意されているので、二つの駆動輪の制御を意識することなく、簡単に動かしたり、図形を描くこともできます。
2.プロットカーの特徴
プロットカーが、ペンで正確な図形を描くためには、プログラムで指定した距離ちょうどに進んだり、指定した角度でぴったりに回転する仕組みや、回転した時にペン先が移動しない(ペン先を中心に回転する)工夫が必要です。例えば、一辺が5cmの正三角形を描くには、5cmの直進と120度の回転を正確に繰り返さなくてはなりません。
プロットカーでは、正確に移動する仕組みとして、駆動輪にステッピングモーターという特別なモーターを採用しています。また、回転時にペン先が移動しないように、ペンの取り付け位置を工夫しています。
プロットカーの特徴 その1【ステッピングモーター】
STEM教育用のプログラミングカーの多くには「DCモーター」と呼ばれるモーターが多く採用されています。このDCモーターは、乾電池などの電源に接続すると、一定の方向へ回転し続けるため、DCモーターだけでは、回転数や回転角度を制御することは難しいとされています。
そのため、プロットカーでは、正確に移動する仕組みとして、独立した二つの駆動輪に「ステッピングモーター」という特別なモーターを採用しています。ステッピングモーターは、DCモーターと異なり、電圧のオンとオフを繰り返すパルス電圧によって駆動し、パルス電圧が印加される毎(1ステップ毎)に一定の角度ずつ回転します。
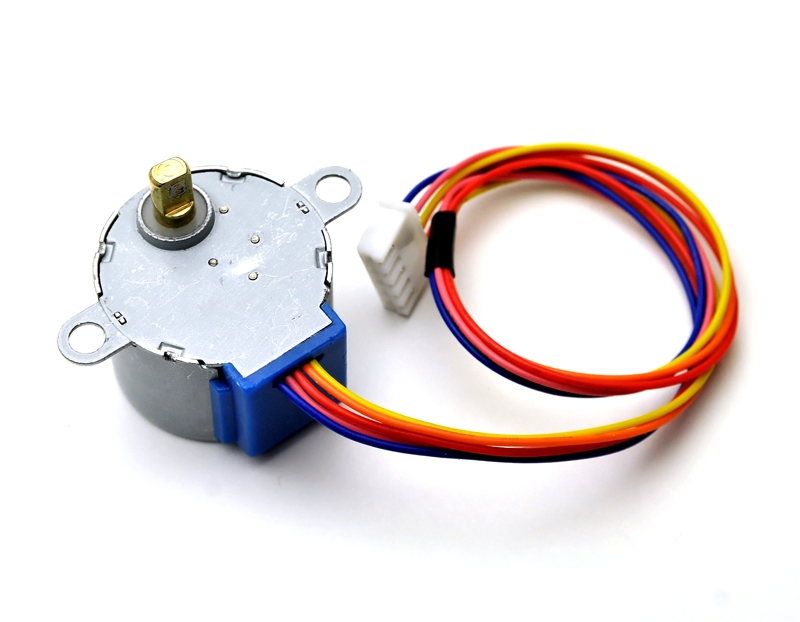
プロットカーに搭載されているステッピングモーターは「28BYJ-48」と呼ばれるもので、ギア比1/64の内蔵プラスチックギアで減速され、ゆっくり回転します。出力軸が1回転するのに必要なステップ数は2048、また、1回転にかかる時間は最速4秒(2相励磁・無負荷時)です。
ステッピングモーターの出力軸には車輪が付いているので、出力軸が1回転すると、車輪の円周の長さだけ進みます。車輪の直径は60mm、円周は直径×円周率で求められるので、1回転でおよそ189mm進むことがわかります。
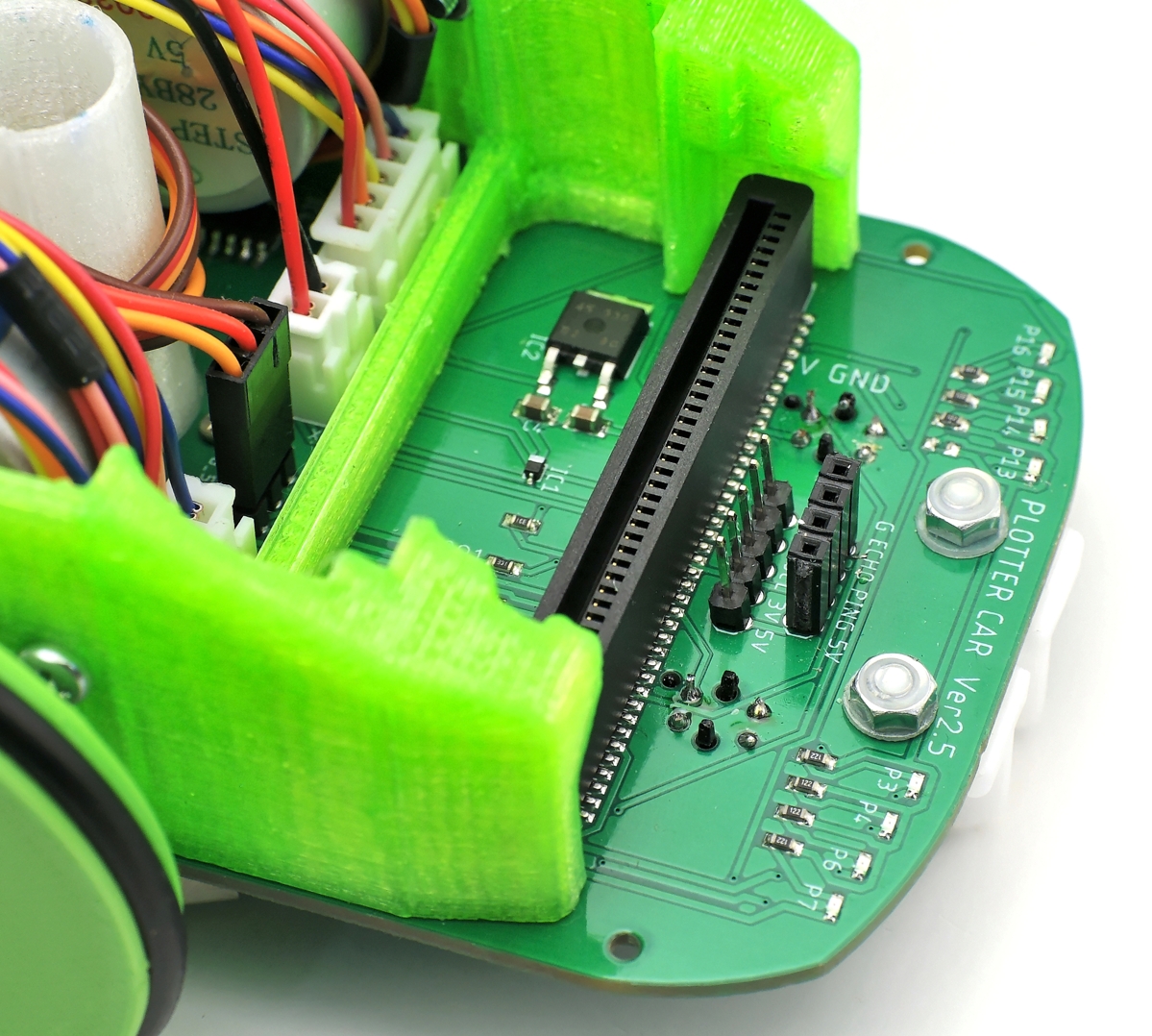
なお、ステッピングモーターの定格電圧は5Vで、それぞれ駆動用IC「ULN2003」を介して、micro:bitと接続されています。接続先の端子は、右側がP3・P4・P6・P7、左側がP13・P14・P15・P16です。各端子のオン・オフに合わせて、フロント部のLEDが点滅します。
プロットカーの特徴 その2【ペン先の位置】
前述の通り、プロットカーでは、ステッピングモーターを使って、正確に移動していることがわかりました。これにより、必要な長さの直線を描くことができます。
ここで、もう一度、正三角形の描画を考えてみましょう。一辺が5cmの正三角形を描くには、5cmの直進と120度の回転を3回繰り返します。プロットカーの本体が回転するには、左右の駆動輪を互いに逆方向(正転と逆転)へ回転させます。この時に、ペン先が移動する(ずれる)と正三角形にはなりません。では、ペン先がどの位置にあればいいでしょうか?
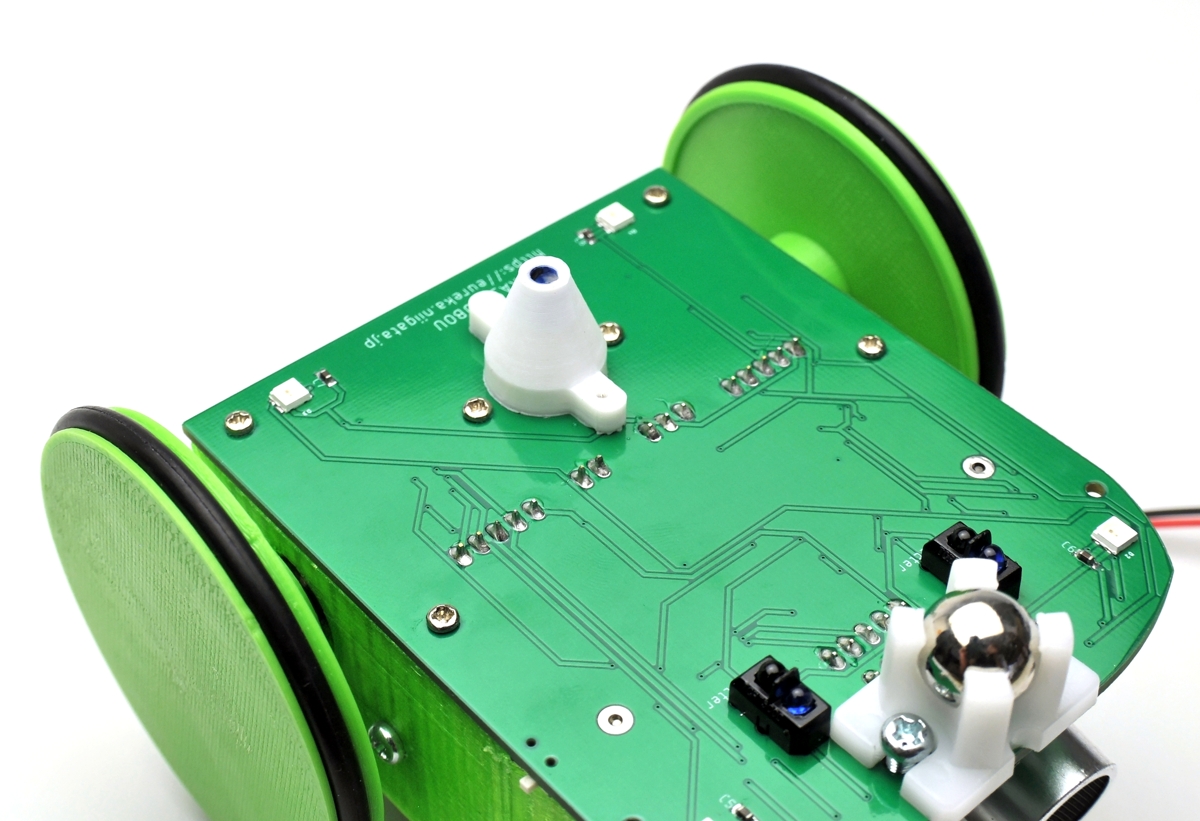
プロットカーの本体が回転するとき、唯一ずれない点(固定された点)は、回転の中心点です。回転の中心点は、左右のタイヤが接地する点を結ぶ直線の中点になります。プロットカーでは、ペン先が回転の中心点になるように工夫されています。
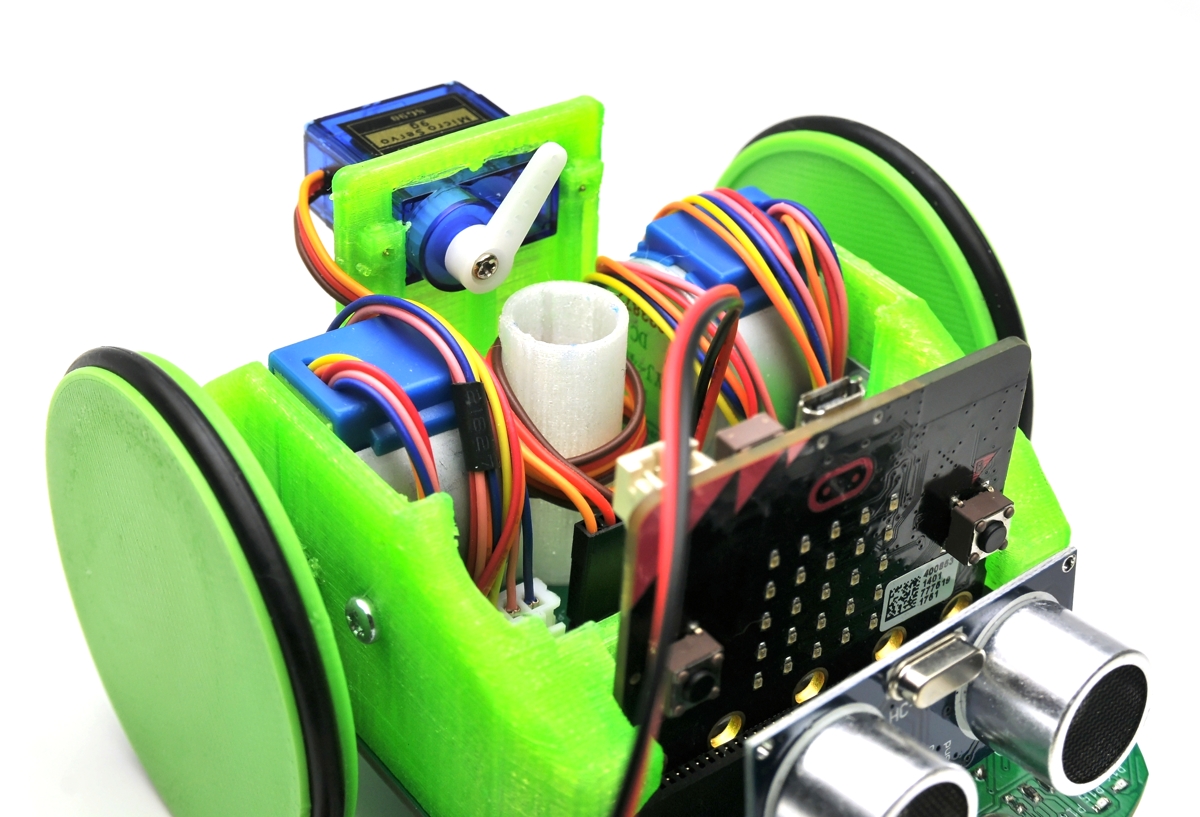
また、ペン先が紙に触れたままだとインクがにじむので、ペンを上げ下げする機能があります。ペンの上下はサーボモーターで行われ、micro:bitの接続先は端子P8です。
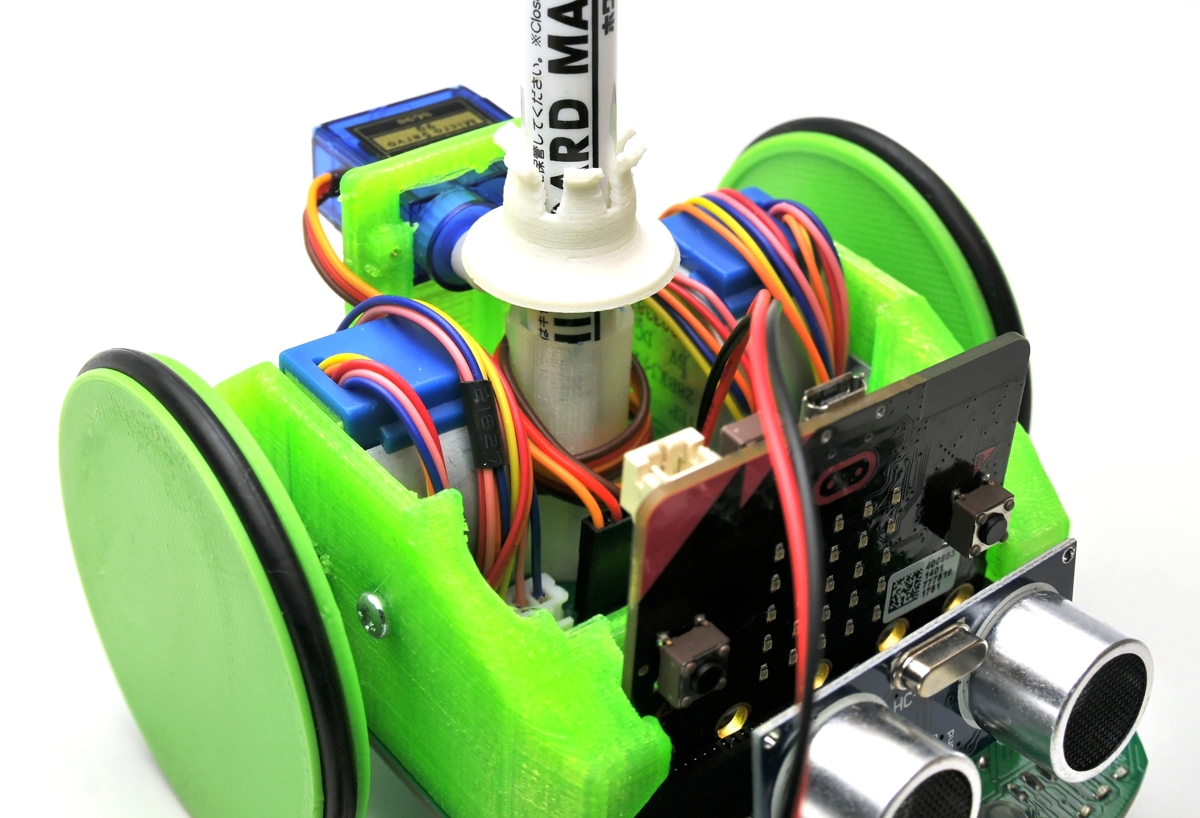
ペンにガイドを取り付け、ペンホルダーに差し込みます。
ペンはしっかりと固定されないため、ペン先に遊びがあります。そのため、回転時にペン先が少しずれることがあります。また、左右の駆動輪の取り付け位置によってもずれが生じます。その場合は、取り付け位置を微調整して、ずれが最小になるようにします。
プロットカーの特徴 その3【バッテリーガイド】
本キットには、バッテリーは付属していません。プロットカー本体の中央部にバッテリーガイドがあり、モバイルバッテリーを立てて収納します。基板の電源コネクターに取り付けられた長さ16cmのUSBケーブルで接続します。
プロットカーの特徴 その4【拡張ポート】
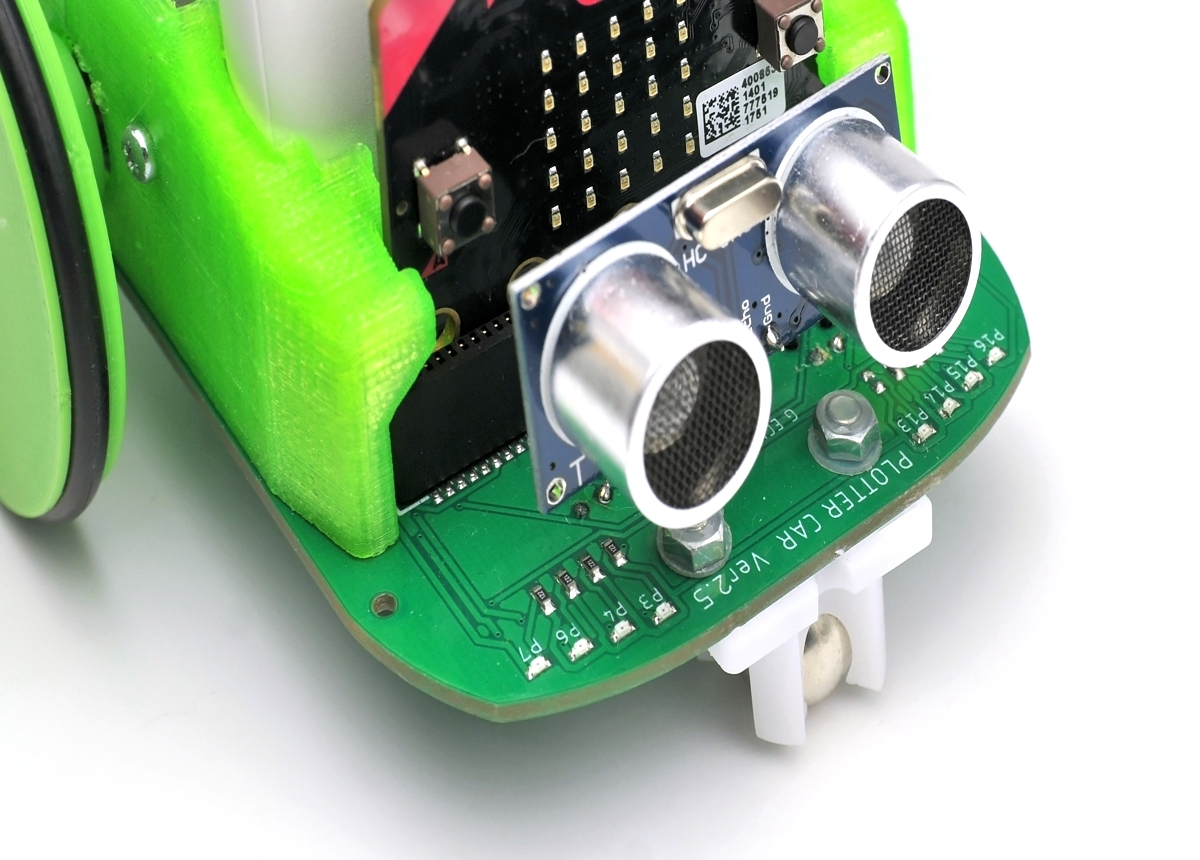
プロットカーには、外部機器を接続するための拡張ポート(I2C)があります。外部機器としてAIカメラ「HUSKYLENS(AI Vision Sensor)」などが接続できます。また、超音波距離センサーを取り付ける端子もあります。
プロットカーの特徴 その5【micro:bitと拡張ブロック】
制御用のコンピュータとして、micro:bitを搭載しています。micro:bitは、教育用として開発された小型のコンピューターボードで「MakeCode for micro:bit」というビジュアルプログラミング環境でプログラムを作成します。
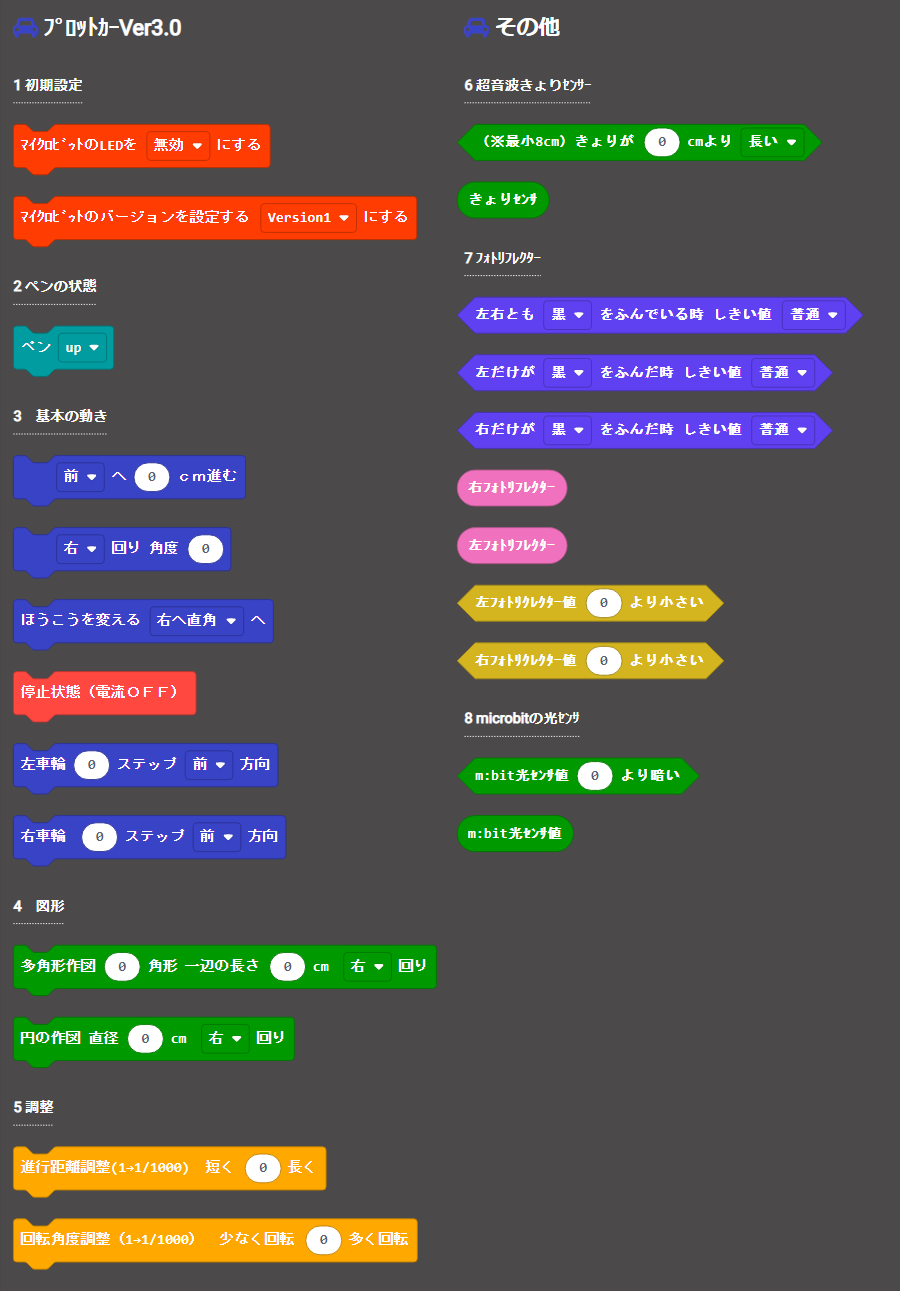
プロットカーの制御は、MakeCode for micro:bitにあらかじめ用意されている標準ブロックでプログラミングできますが、より作図に注力できるようにプロットカー専用の拡張ブロックが用意されています。長さや角度を指定することができるので、正多角形の作図を学習するにはおすすめです。
micro:bitについては「第1章 micro:bit入門」で詳しく紹介しています。
3.プログラミング
正三角形を描く
一辺が5cmの正三角形を描くプログラムを考えてみます。プロットカーで、一辺が5cmの正三角形を描くには、ペンを上げ下げしながら、5cmの直進と120度の回転を3回繰り返します。
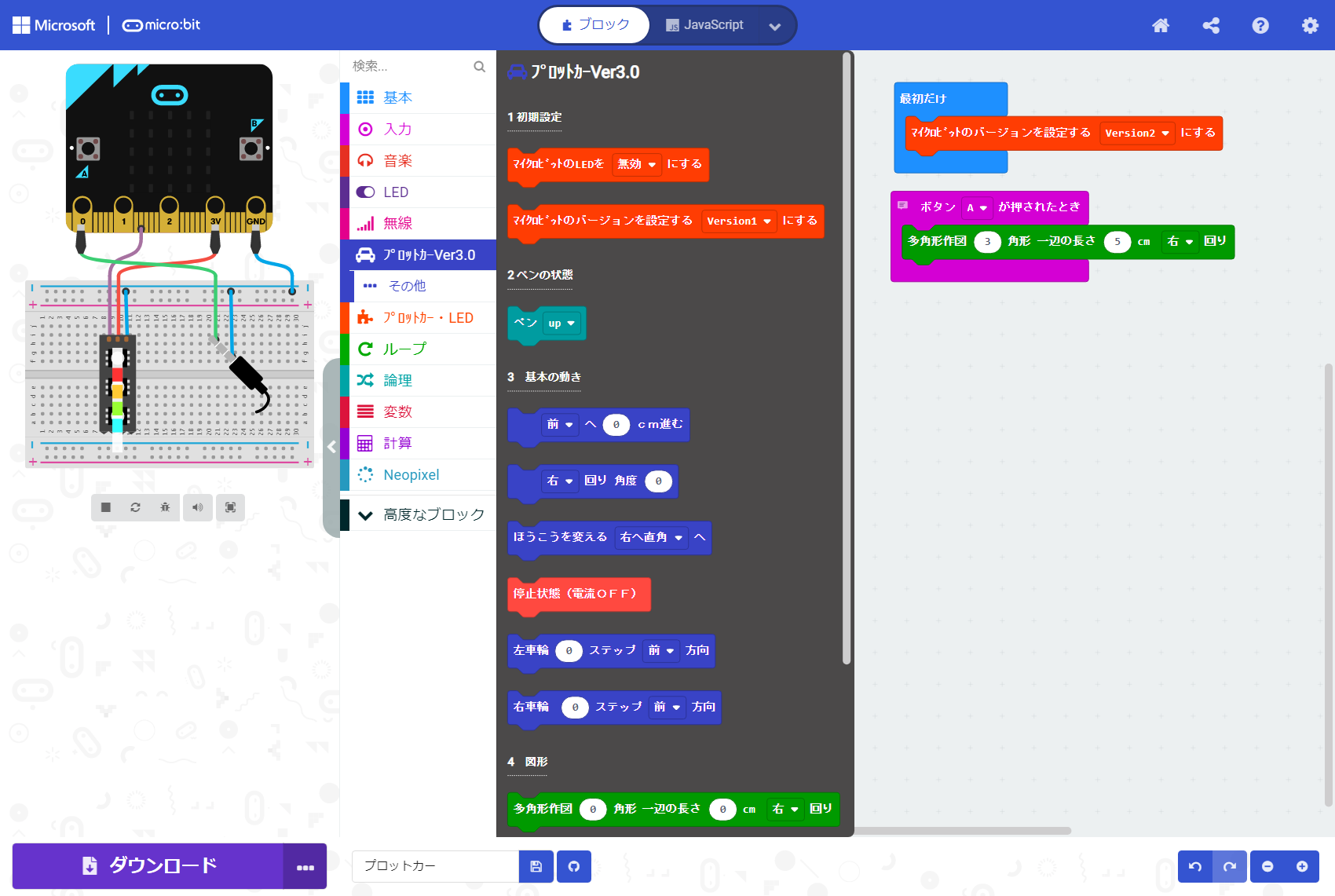
図3-1は、正三角形を描くプログラムの一例です。micro:bitのボタンAを押すと、1秒後に正三角形を描きはじめます。
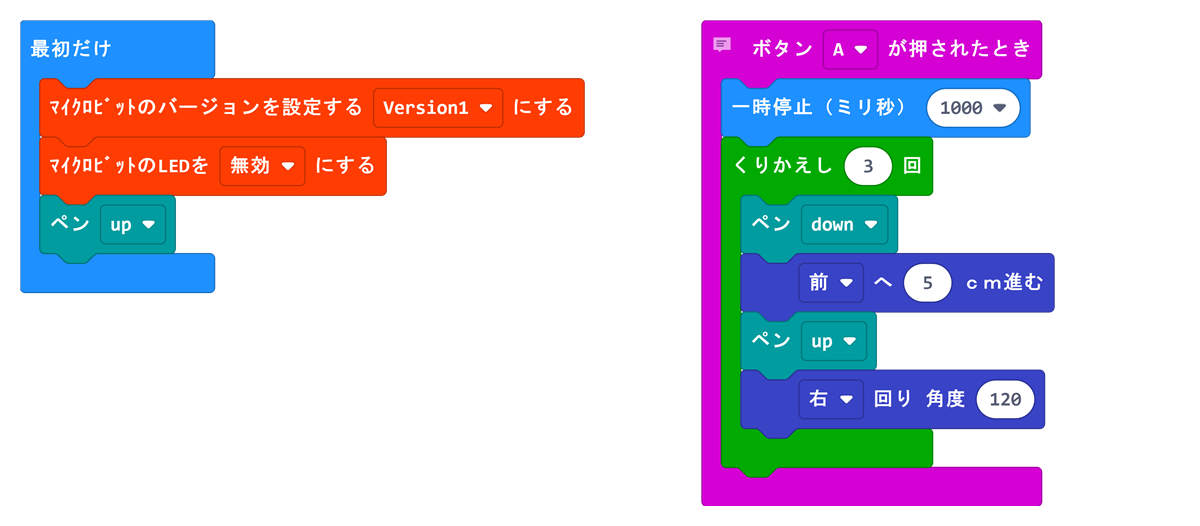
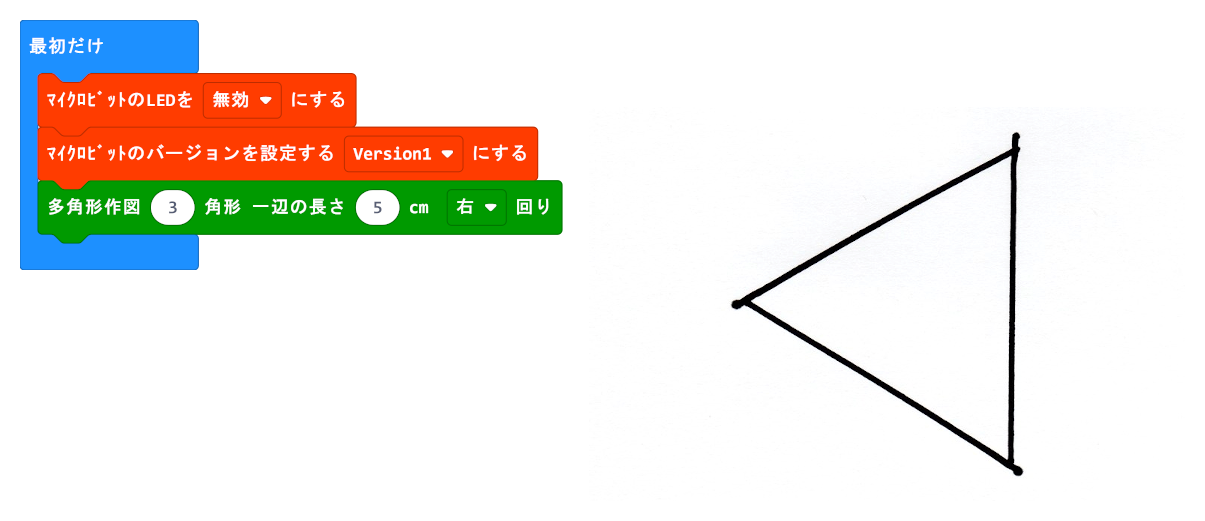
図3-2は、コピー用紙に名前書き用油性ペンを使って描画した正三角形を、スキャナーで取り込んだ画像です。
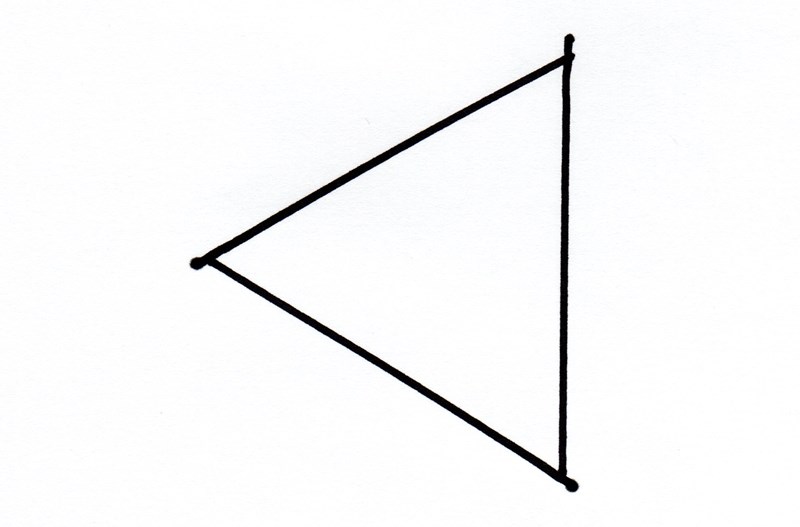
ペンはしっかりと固定されないため、ペン先に遊びがあります。そのため、回転時にペン先が少しずれることがあります。また、左右の駆動輪の取り付け位置によってもずれが生じます。その場合は、取り付け位置を微調整して、ずれが最小になるようにします。
4.プログラミング&ゲーム
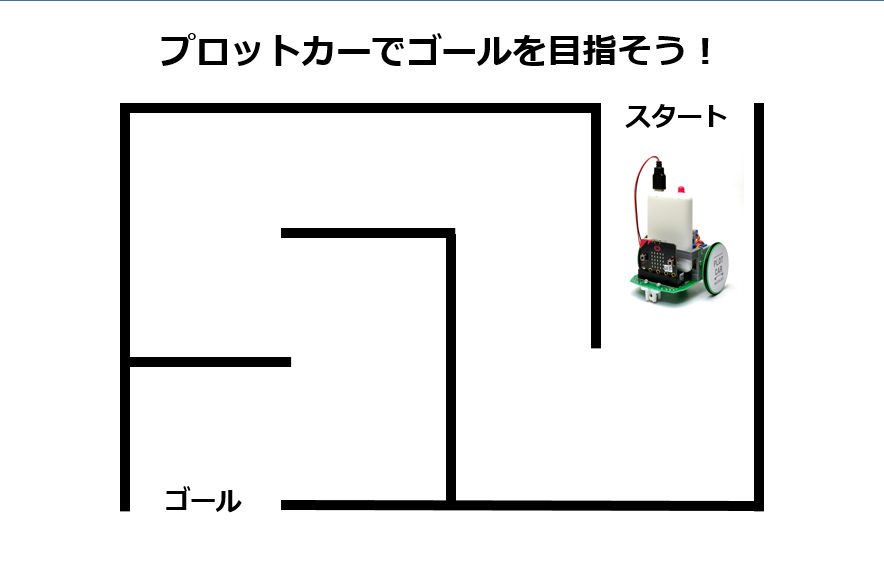
プロットカーでゴールを目指そう!
プロットカーを使ったゲームを紹介します。このゲームは、正確な距離を進むことができるプロットカーの特長を活かしたもので、プログラミングによって、コースのスタートからゴールを目指します。ゴールまでの道のりを適切な手順に分解してプログラミングするので、プログラミング的思考の育成につながります。
まず最初に、大きめの紙を用意して、プロットカーが通れる幅のコースを作ります。最初は簡単なコースがいいですね。
コースができたらゲーム開始です。プレイヤーは、物差しなどを使って、通路の距離を測ります。直接、コースに記入したり、複数のプレイヤーで競う場合は、自分のメモ用紙に記録するなどルールを決めておきましょう。
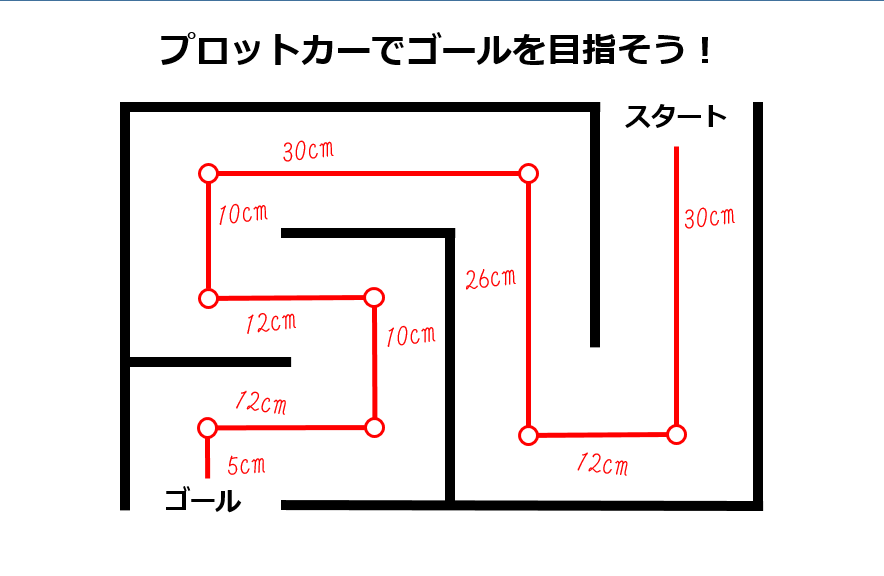
各通路の距離がわかったら「前へ進む」「右回り」「左回り」などのブロックを組み合わせてプログラミングします。プログラミングができたらゴールを目指して、いざスタート!タイヤが壁に触れるとやり直し!プログラムを作り直そう。何回目のプログラムでゴールできるかな?
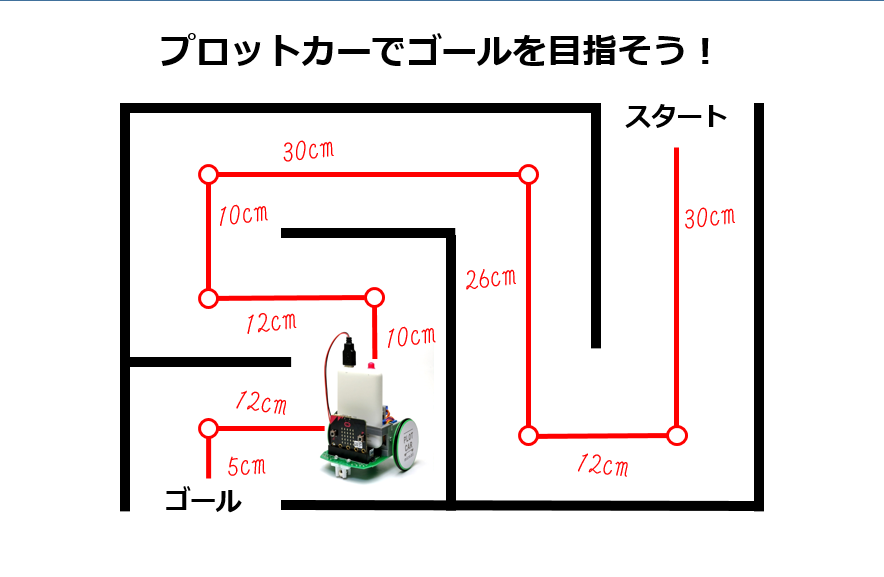
コースを複雑にしたり、物差しを使わずに目測でチャレンジしたり、オリジナルのルールを考えて楽しみましょう!
おすすめ品













