シリアル通信【Windows編】
micro:bitとWindowsパソコンでシリアル通信するための手順です。
micro:bitのセンサーなどを使ってプログラミングしていると、その値をリアルタイムに確認したくなります。そんなときは、シリアル通信でパソコンのターミナルエミュレーターなどに表示するのが便利です。
シリアル通信は、USBケーブルでmicro:bitとパソコンを接続して行います。
付録1-3-1.シリアル通信のための準備
シリアル通信の準備として、mbed Windowsシリアルポートドライバーをダウンロードして、パソコンへインストールします。この手順は、最初に一度だけ行います。
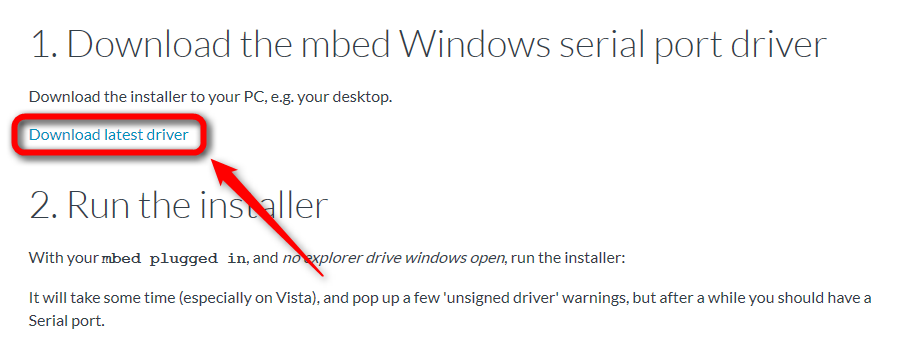
mbed Windowsシリアルポートドライバーのダウンロード
Windows serial configuration(arm MBED)に、アクセスします。Download latest driverのリンクから最新版のインストーラーをダウンロードして、保存します。
mbed Windowsシリアルポートドライバーのインストール
ダウンロードしたインストーラーを実行します。
[Install]をクリックします。

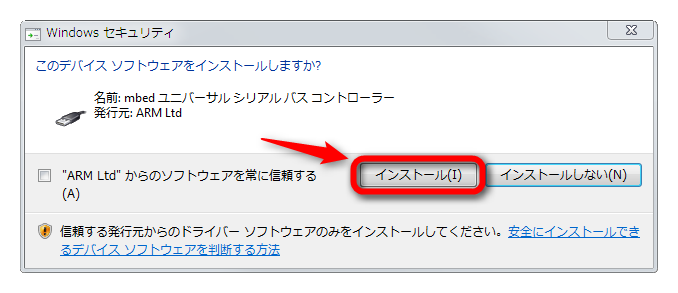
mbedユニバーサルシリアルバスコントローラーのインストール確認画面が表示されるので、[インストール]をクリックします。
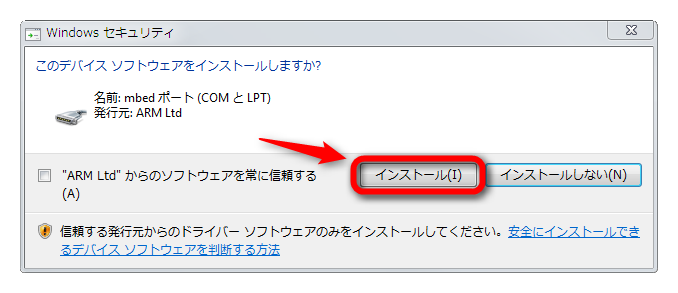
mbedポート(COMとLPT)のインストール確認画面が表示されるので、[インストール]をクリックします。
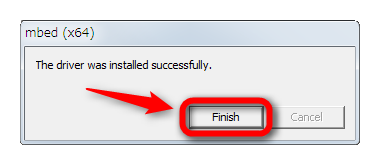
「The driver was installed successfully.」のメッセージが表示されるとインストールは完了です。[Finish]をクリックして、終了します。
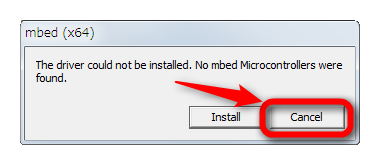
[Install]をクリックしても、「The driver could not be installed. No mbed Microcontrollers were found.」が表示されて、インストールが始まらない場合があります。これは、micro:bitが、パソコンに接続されてない場合に表示されるメッセージです。一旦、[Cancel]をクリックして、micro:bitを接続した後、インストールをやり直してください。
付録1-3-2.接続するCOMポート番号の確認
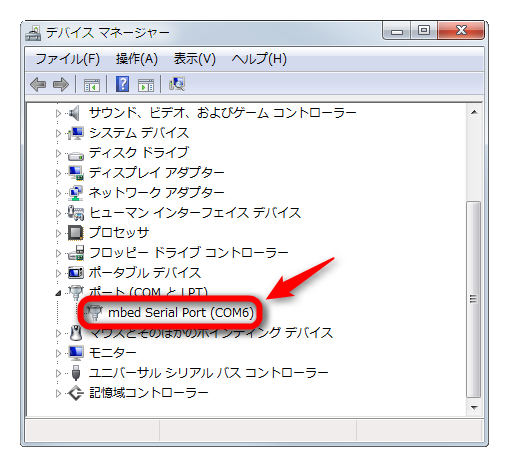
インストールが終了したら、接続するCOMポート番号を確認します。デバイスマネージャを起動して、デバイスの一覧から「ポート(COMとLPT)」に表示される「mbed Serial Port」を確認します。図 付録1-2-2-1.COMポート番号の確認では、「COM6」がCOMポート番号です。
付録1-3-3.ターミナルエミュレーターの起動と設定
micro:bitからのデータを受信するために、パソコンでターミナルエミュレーターを起動します。ここでは、Tera Termを使用します。
ターミナルエミュレーターの起動と設定
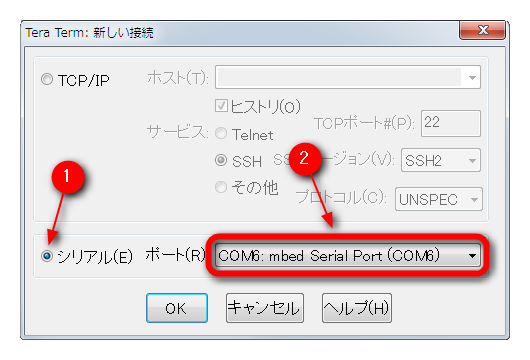
Tera Termを起動して、[ファイル]>[新しい接続]を選択します。「シリアル」にチェックを付けて、「ポート」を選択します。選択するポートは、付録1-2-2.接続するCOMポート番号の確認で確認したCOMポート番号です。[OK]をクリックします。
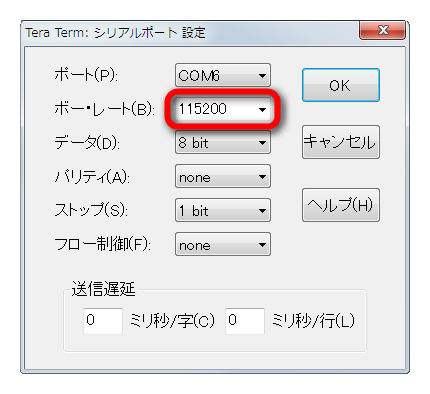
[設定]>[シリアルポート]を選択します。「ボー・レート」を「115200」に変更します。[OK]をクリックします。これで、ターミナルエミュレーターの準備は完了です。
付録1-3-4.シリアル通信の例
そもそもシリアル通信をしようと思ったのは、三軸加速度センサーの出力値が確認したかったからです。X軸とかY軸とか頭で考えてもよくわからないもので・・・。以下は、micro:bitからパソコンへ送信するシリアル通信のサンプルプログラムです。
サンプルプログラム
図 付録1-3-4-1.シリアル通信のサンプルプログラム(ブロック)は、X軸・Y軸・Z軸の加速度を、シリアル通信で繰り返し送信するプログラムです。送信後、区切りの文字列「----------」を書き出して、500ミリ秒休止するようにしています。
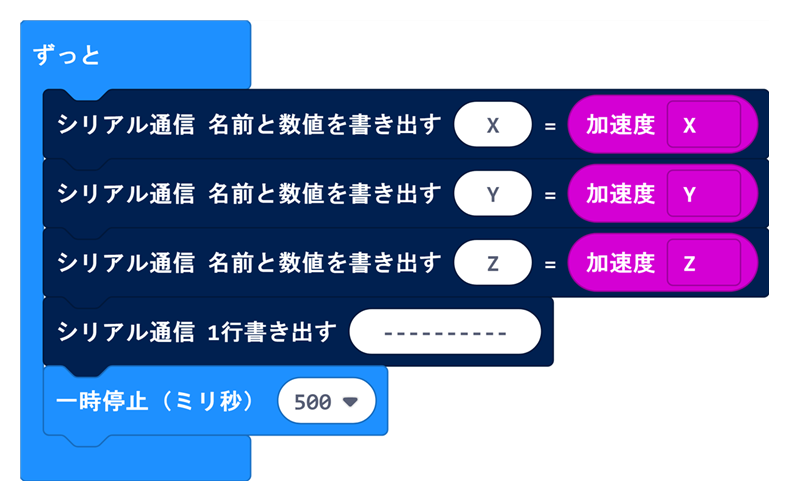
表 付録1-3-4-1.シリアル通信のサンプルプログラム(JavaScript)は、同じプログラムをJavaScriptで記した場合です。
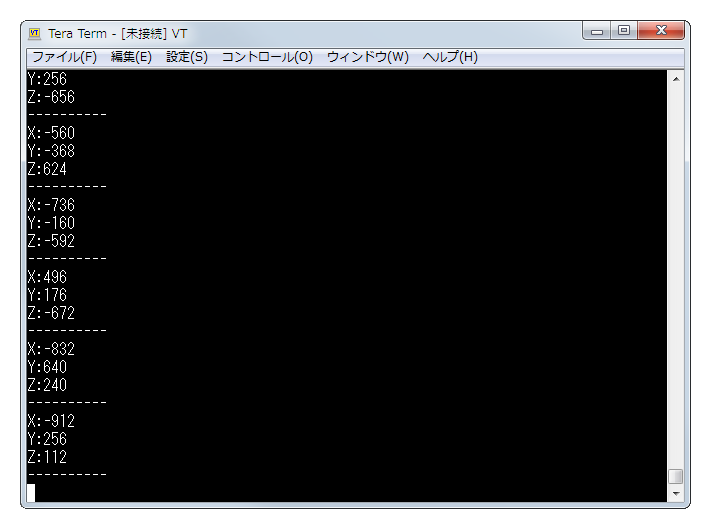
実行結果
サンプルプログラムの実行結果です。ターミナルエミュレーターの画面に、X軸・Y軸・Z軸の加速度が、約500ミリ秒間隔で表示されます。