はじめてのロボットプログラミング
ロボットカー制御の基礎からセンサーによる自動運転、リモコンによる無線操縦などを楽しく学んだあと、ピンポン玉を集める競技にチャレンジ!紙工作で自分流のロボットカーに改造して、ピンポン玉をたくさん集めよう!スタッフがサポートするのでプログラミングが初めてでも安心のワークショップです。
- 第1回目:2024年6月29日(土)開催
- 第2回目:2024年8月25日(日)開催
- 第3回目:2024年10月14日(月・祝)開催
- 第4回目:2024年12月15日(日)開催
- 第5回目:2025年2月9日(日)開催
- 第6回目:2025年4月13日(日)開催
はじめてのロボットプログラミング
ロボット・ラボ
情報通信交流館 e-とぴあ・かがわ(香川県高松市)では、年間を通して、さまざまな子ども向けワークショップが開催されています。その中でも「ロボット・ラボ」は、毎回募集定員を超え、抽選となる大人気のワークショップです。ロボット・ラボでは、自律型ロボットの制御に必要なセンサーの活用法やプログラミングを学び、仲間と協力して、ロボカップジュニアなど競技会への出場を目指します。
はじめてのロボットプログラミング
そのロボット・ラボの前段となるロボット入門用のワークショップとして「はじめてのロボットプログラミング」が、2024年6月より開講しました。

はじめてのロボットプログラミングでは、独立した二輪の駆動輪を持つロボットカーを使って、その仕組みを学び、プログラミングによる制御(直進・回転・旋回・停止)やセンサーを使った自動運転などを体験します。また、最終課題として、プログラミングで無線操縦できるようにしたロボットカーを紙工作で改造して、制限時間内にコート内のピンポン球を集める競技にチャレンジします。
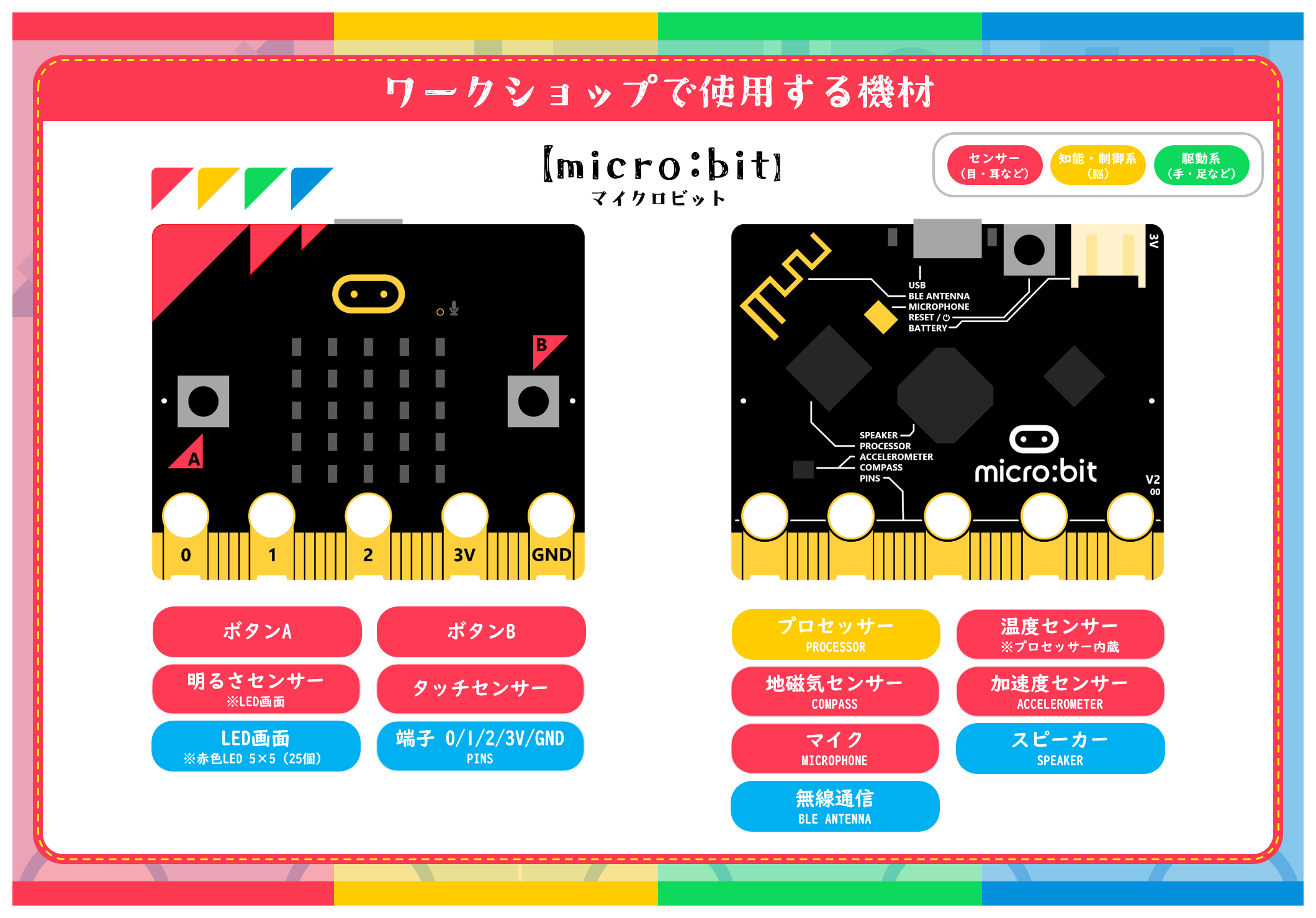
ワークショップで使用する機材
micro:bitは、イギリスの公共放送局であるBBC(英国放送協会/British Broadcasting Corporation)が中心となって開発した教育用の小型コンピューターボードです。LED画面(25個の赤色LED)・二つのボタン・スピーカー・明るさセンサーや温度センサーなどの各種センサー・無線通信などを搭載しています。
micro:Maqueen Liteは、独立した二つの駆動輪を持つSTEM教育用のロボットカーです。micro:bitを搭載することで、駆動輪などをプログラミングで制御することができます。
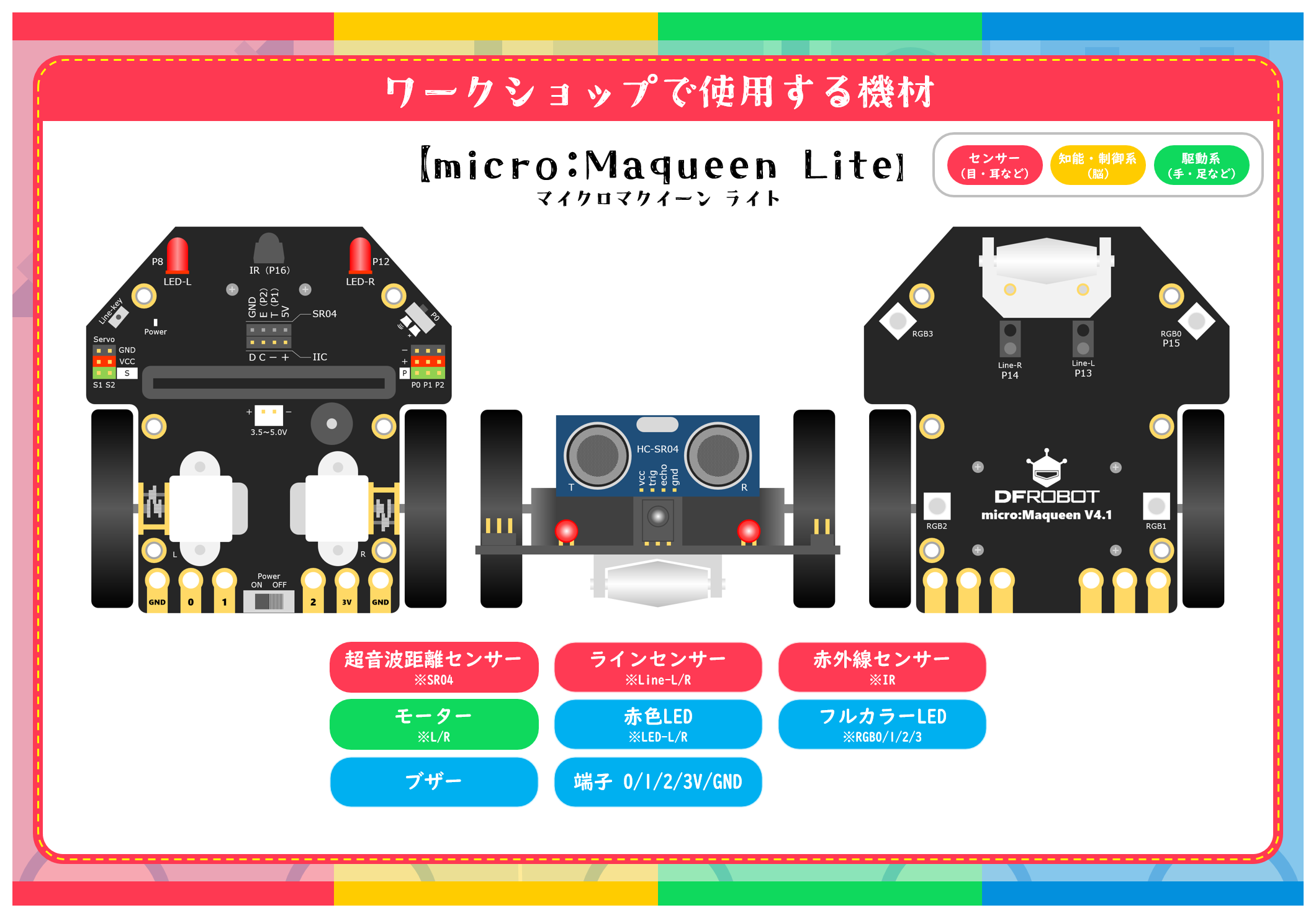
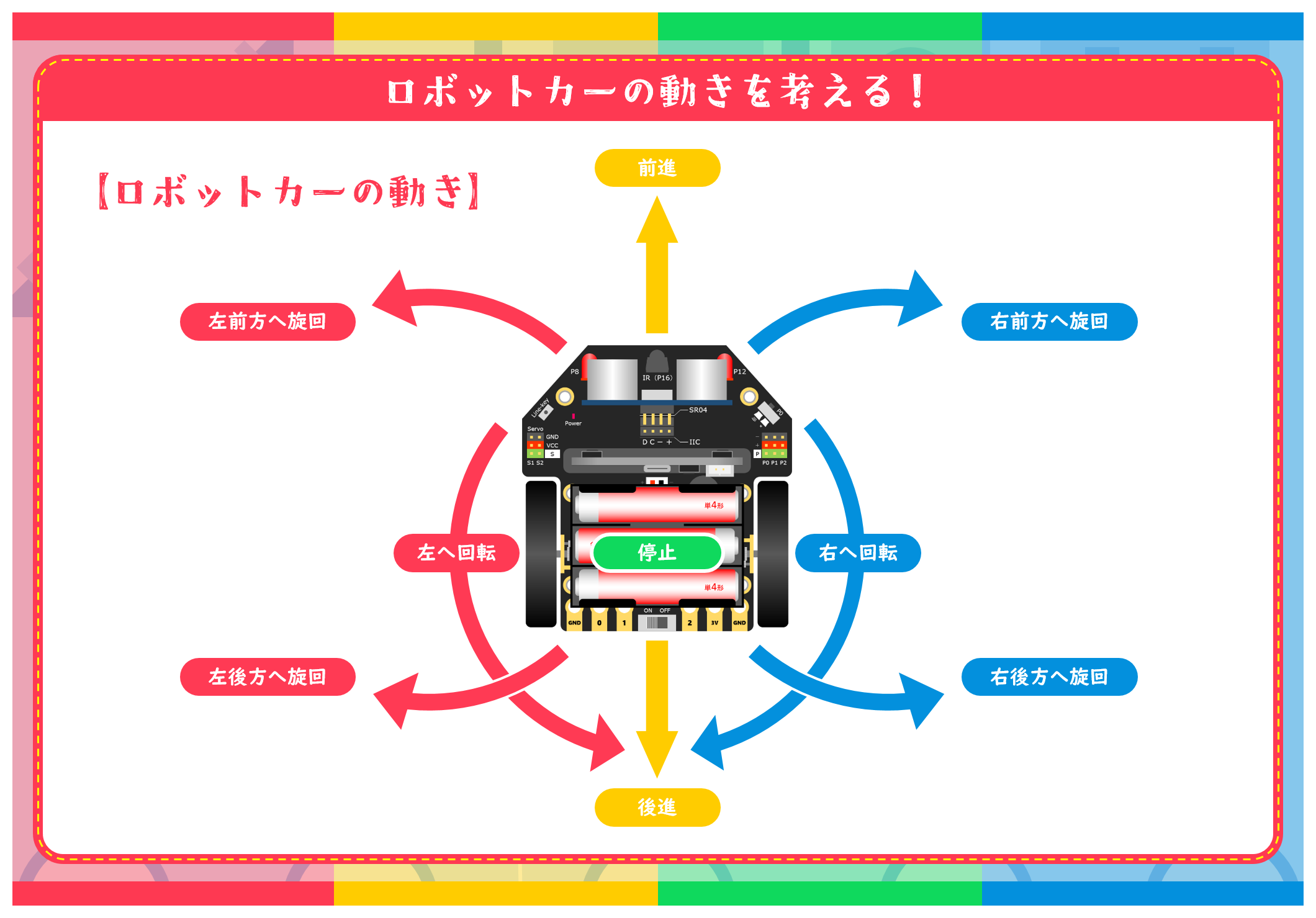
プログラミングによって、左右の駆動輪の回転する方向や速度を変えることで、さまざまな動作(直進・回転・旋回・停止)が行えます。
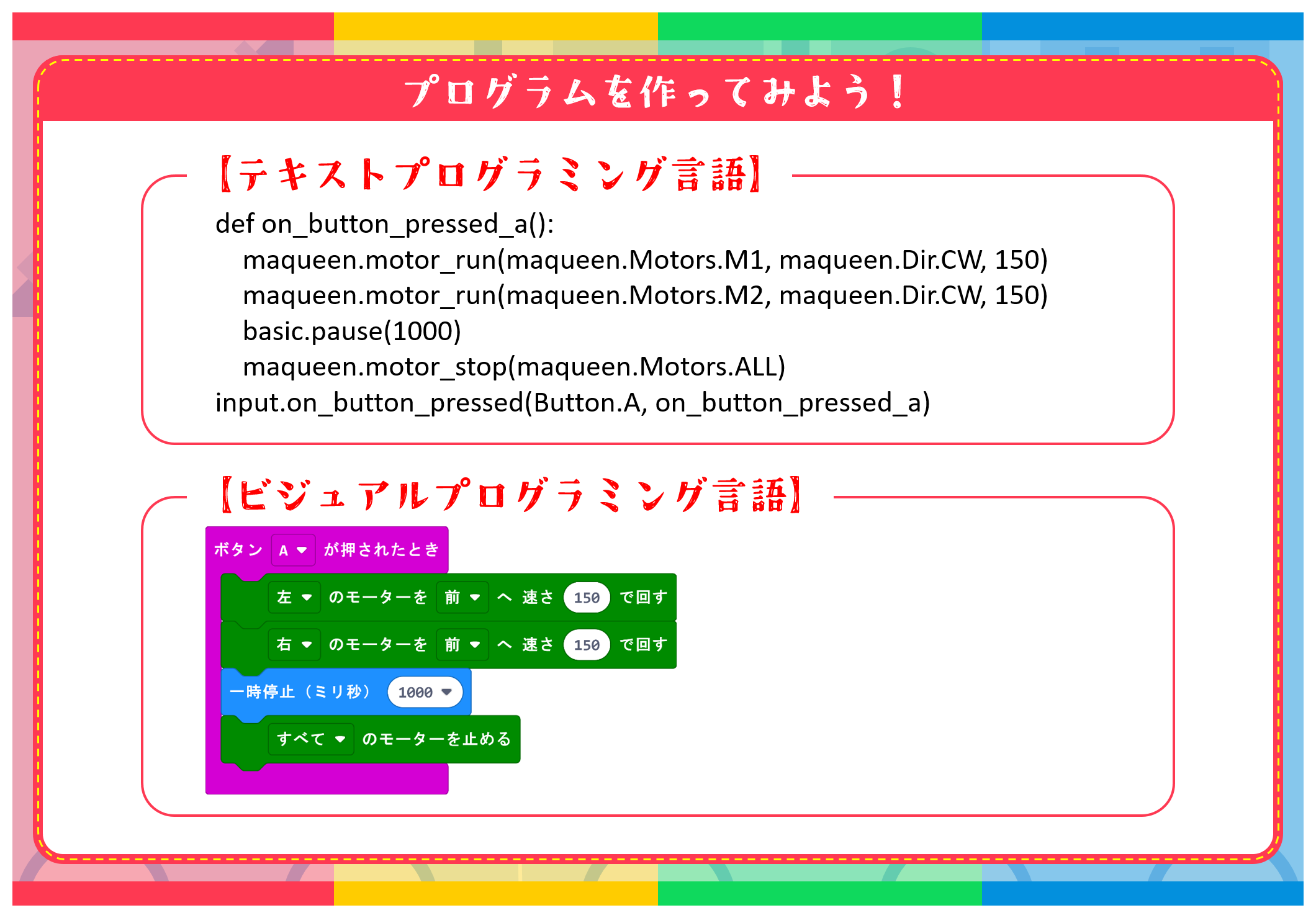
プログラミング言語
プログラムを作るためのプログラミング言語には、さまざまな種類がありますが、本ワークショップでは、ブロックを選んでつなげるビジュアルプログラミング言語を採用しています。
対象と体験内容
本ワークショップは、10:30~16:30(お昼休憩あり)の1日コースで、小学3年生~6年生が対象です。体験内容は次の通りです。
- 10:30~ はじめてのmicro:bit
- 11:00~ ロボットカー制御の基礎
- 12:00~ お昼休憩
- 13:00~ センサーによる自動運転
- 13:30~ リモコンによる無線操縦
- 14:00~ 紙工作による改造
- 15:00~16:30 ピンポン球を集める競技に挑戦!
はじめてのmicro:bit、ロボットカー制御の基礎
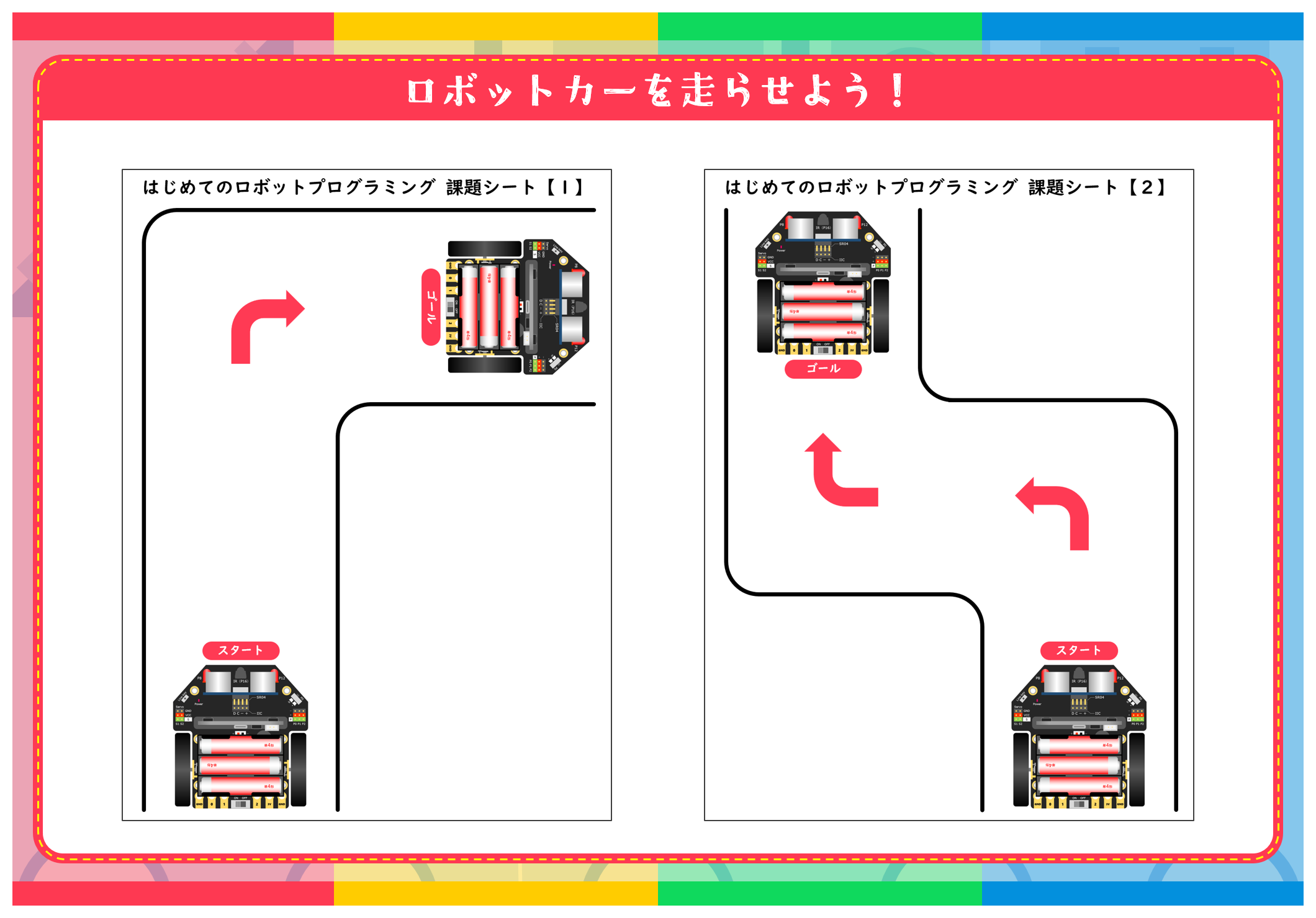
micro:bitの簡単なプログラミングを体験した後、ロボットカーの動作(直進・回転・旋回・停止)について学びます。目標は、プログラミングでロボットカーを思い通りに走らせることです。最後に、学習シートのスタートからゴールを目指します。
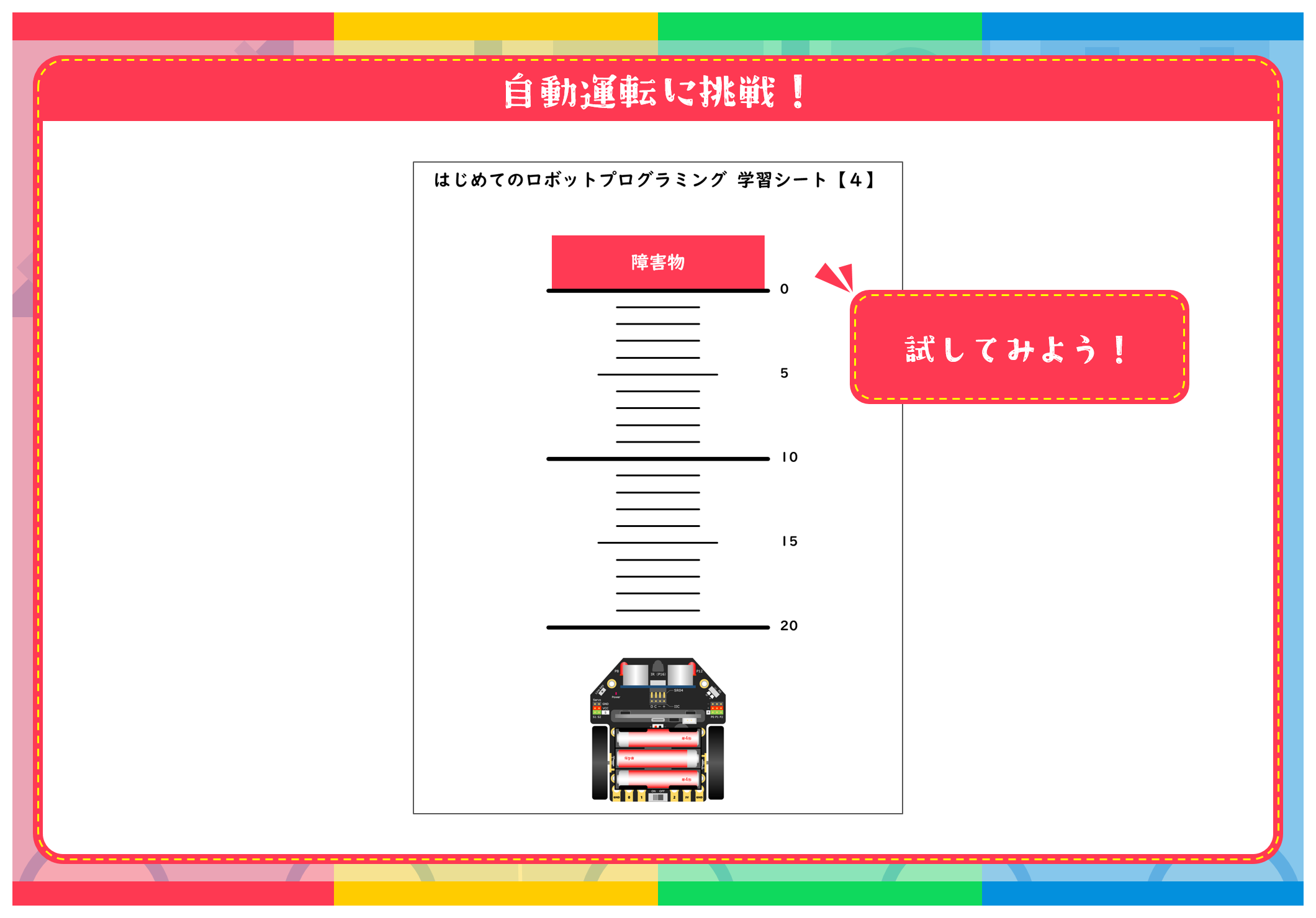
センサーによる自動運転
ロボットカーが、プログラム通りに走るようになったら、次は自動運転に挑戦します。障害物を見つけたら、停止したり、ぶつからないように回避するプログラムを作ります。障害物を見つけるために必要なセンサーは何か?さまざまなセンサーの中から必要なものを一緒に考えます。
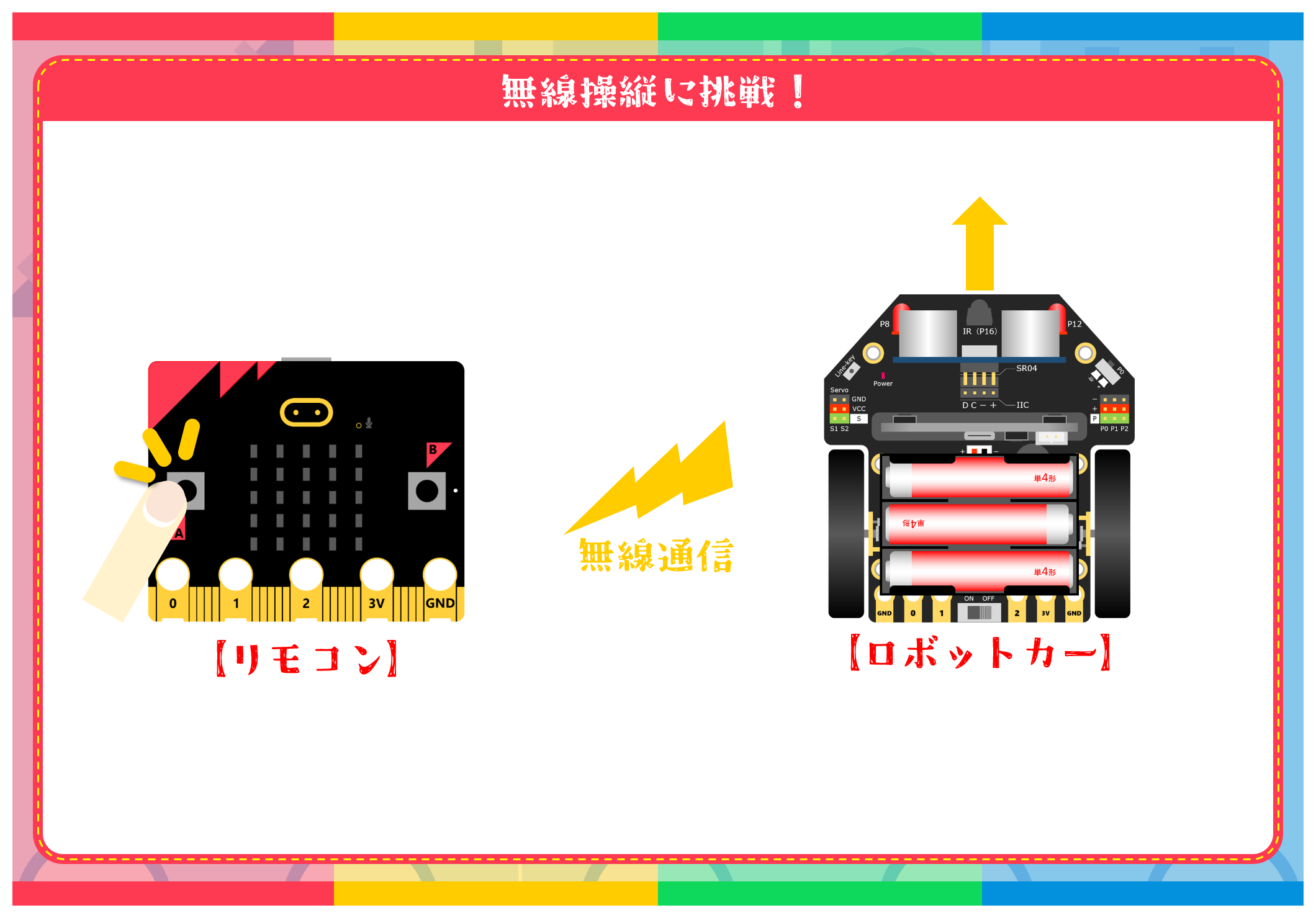
リモコンによる無線操縦
別のmicro:bitをリモコンにして、ロボットカーを無線操縦するプログラムを作ります。ボタンA・ボタンBを押したとき、どんな動きをロボットカーに割り当てるか、自分で考えてプログラミングします。
紙工作による改造
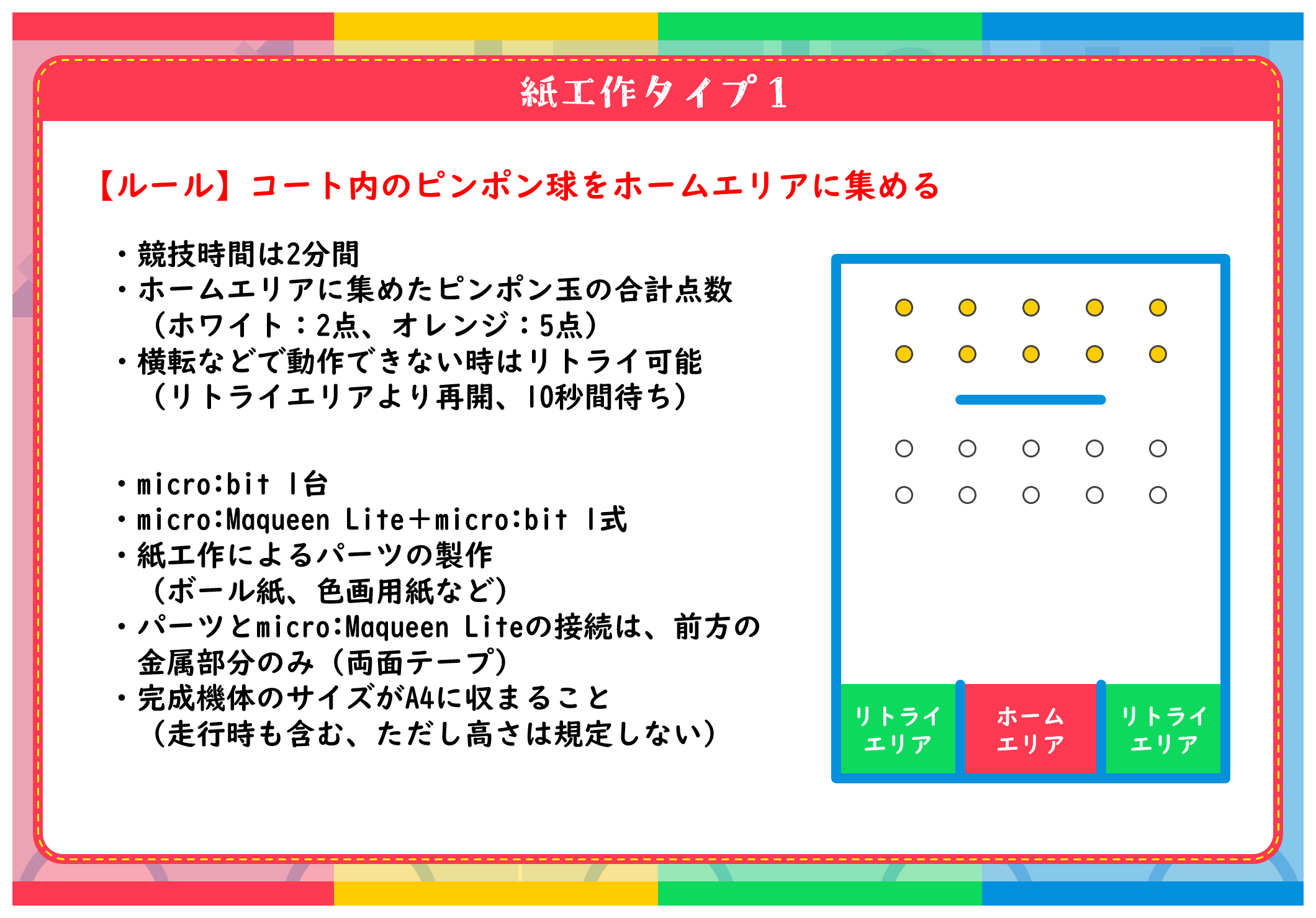
本ワークショップの最終課題は、制限時間内にコース内のピンポン球を集める競技にチャレンジすることです。ピンポン球を集めやすくするパーツを紙工作で作ってロボットカーを改造したり、複雑な動きをするようにプログラムを改良します。何度もコースで試しながら改造・改良するのがコツです。

ピンポン球を集める競技に挑戦!
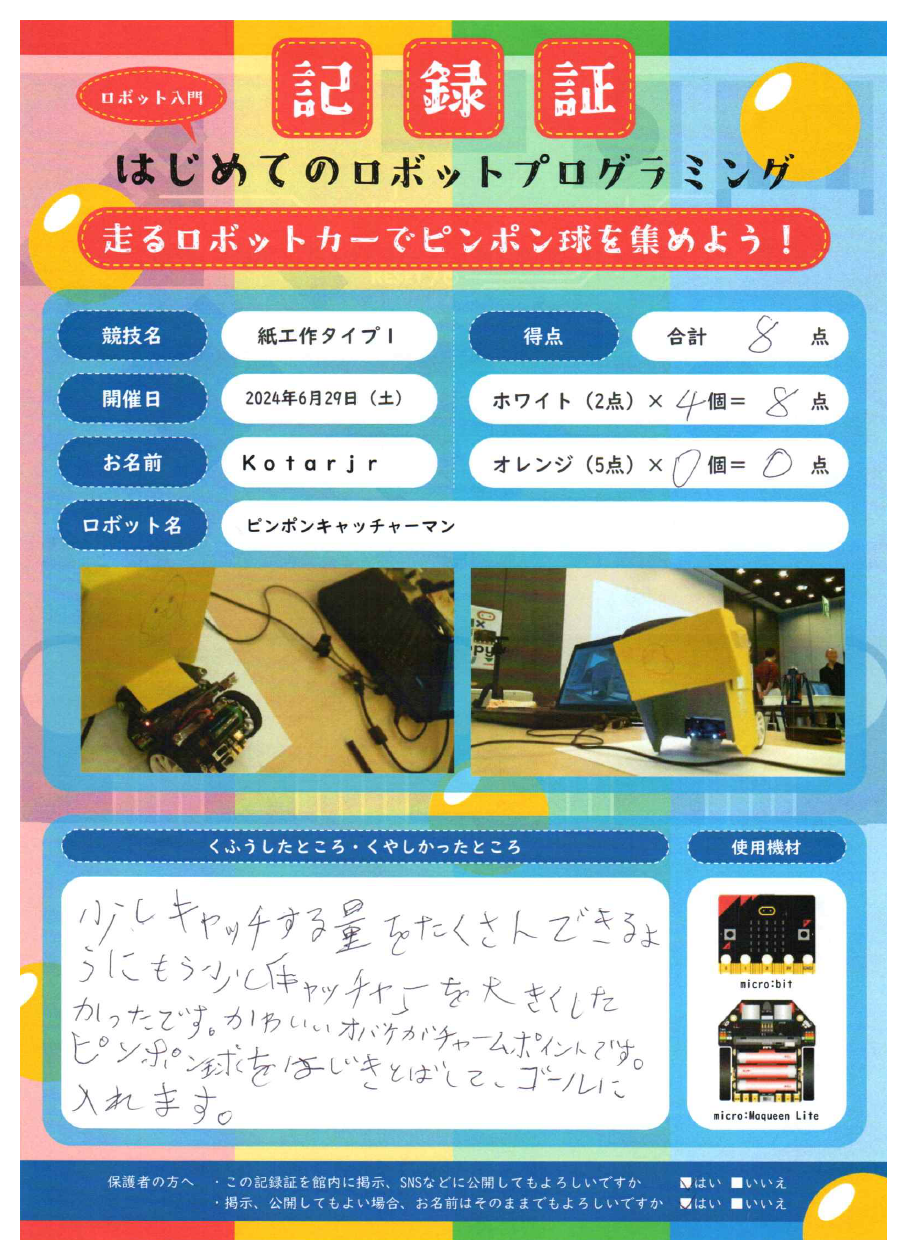
ロボットカーが完成したら競技にチャレンジ。ワークショップが終了するまでなら、何度でもチャレンジできるので、高得点を目指そう!
合計得点と、自分のお気に入りの角度で撮った写真入りの記録証をその場で発行します。