16サーボ駆動ボード【KITRONIK-5612】

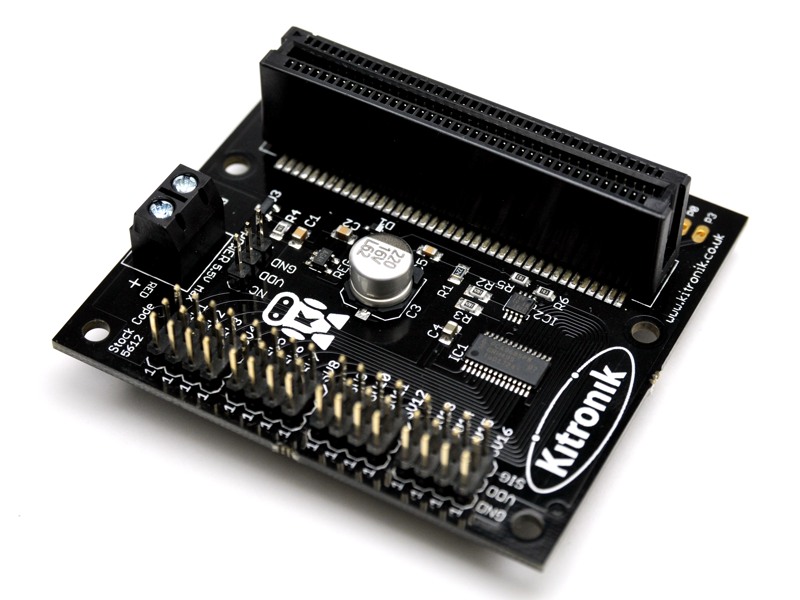
micro:bitを使って、最大16台までのサーボモーターを制御できるKITRONIK社の拡張ボード「16 Servo Driver Board」を紹介します。
1.製品の紹介
この拡張ボード「16 Servo Driver Board」を使用すると、micro:bitから最大16台までのサーボモーターを制御することができます。
コントローラーには、NXPセミコンダクターズ社の12ビットPWM・16チャネルのPCA9685が採用され、I2Cでmicro:bitと通信します。
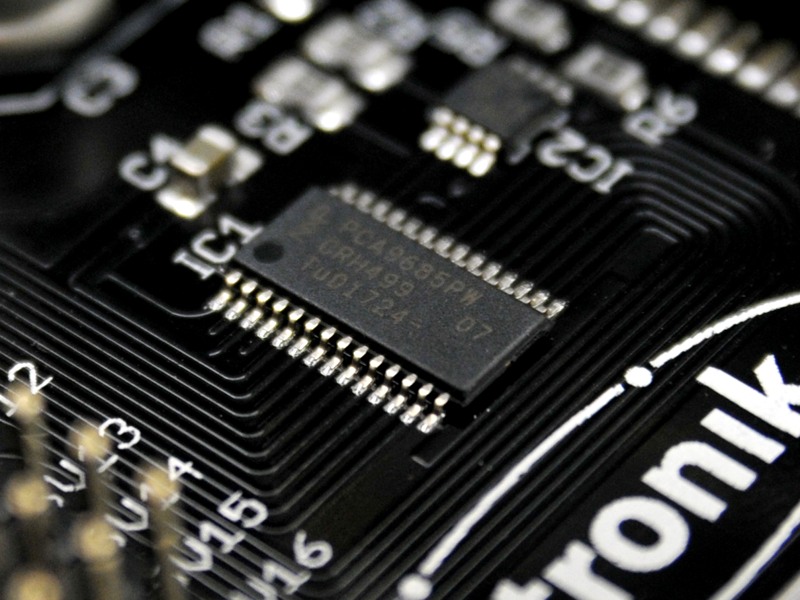
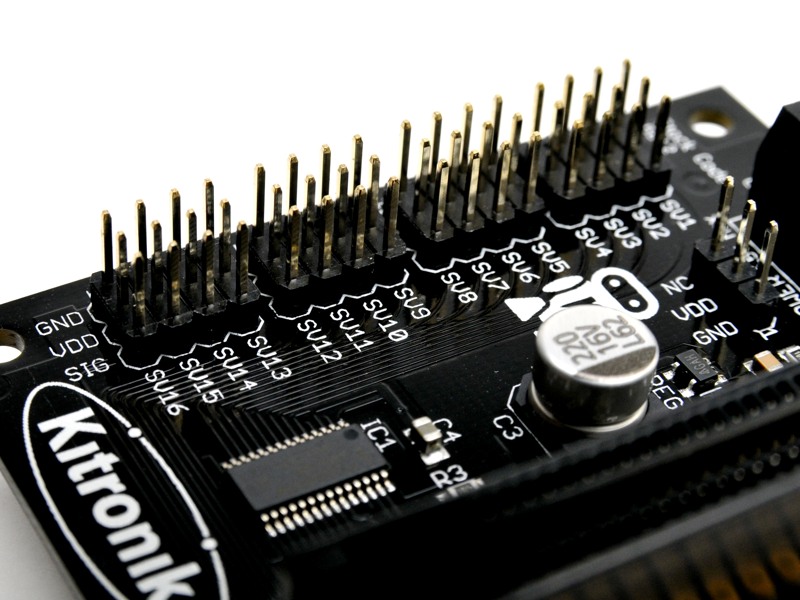
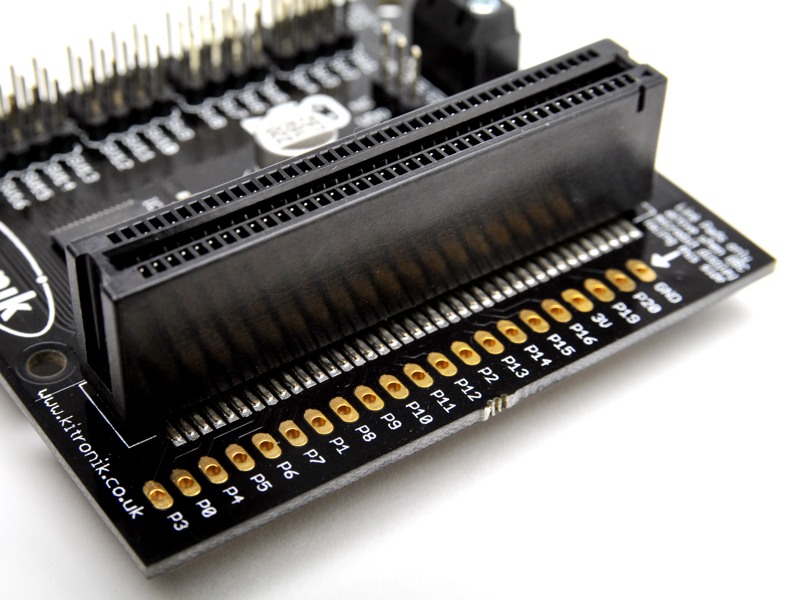
図1-3は、サーボモーターのソケットを接続する3ピンのコネクターです。SV1からSV16までの16台接続することができます。コネクターは、中央が電源(VDD)、両側がグランド(GND)・信号線(SIG)となっています。
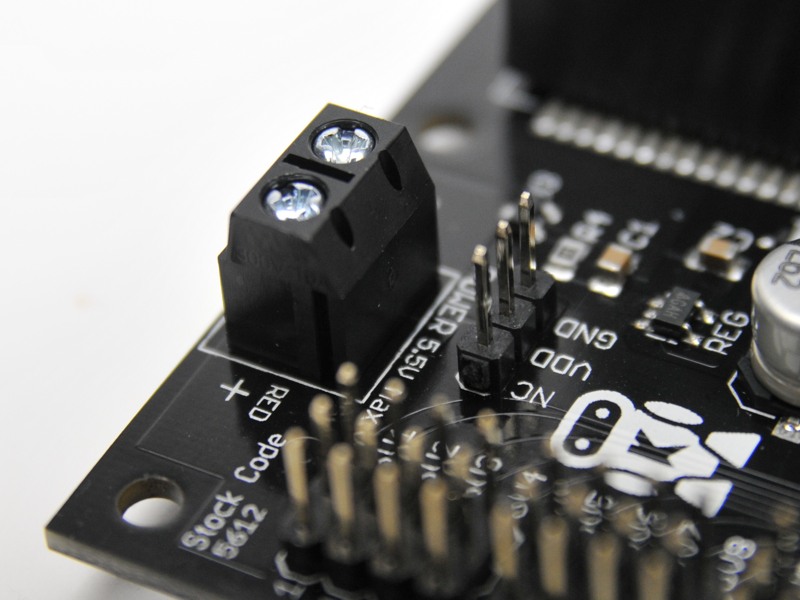
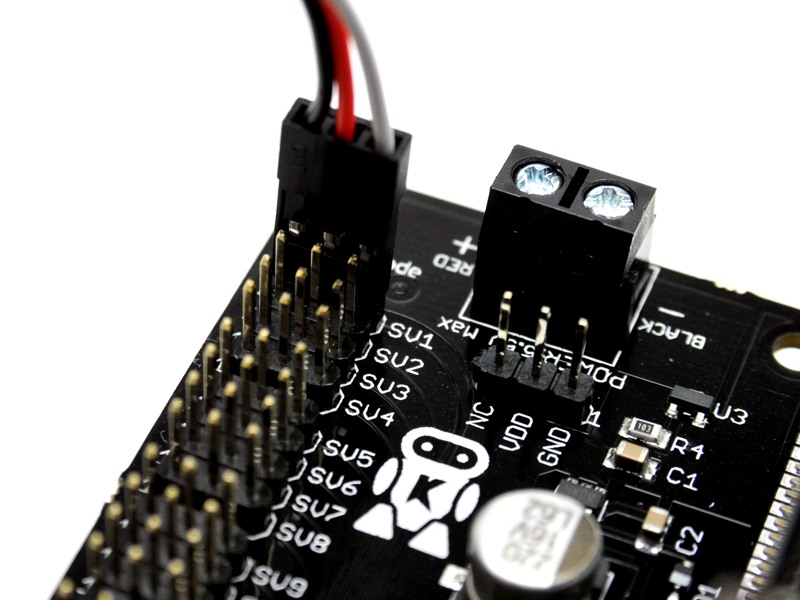
拡張ボードへの電源供給は、図1-4のようにターミナルブロック、またはヘッダーピンによって行います。電圧範囲は3V~5.5Vで、サーボモーターとmicro:bitへ電源が供給されます。
また、エッジコネクターを引き出したパッドを搭載しています。

2.使い方
サーボモーターの取り付け
サーボモーターを取り付けます。図2-1は、コネクターSV1にサーボモーターを取り付けた例です。ボードの外側からグランド(GND)・電源(VDD)・信号線(SIG)となります。
電源の取り付け
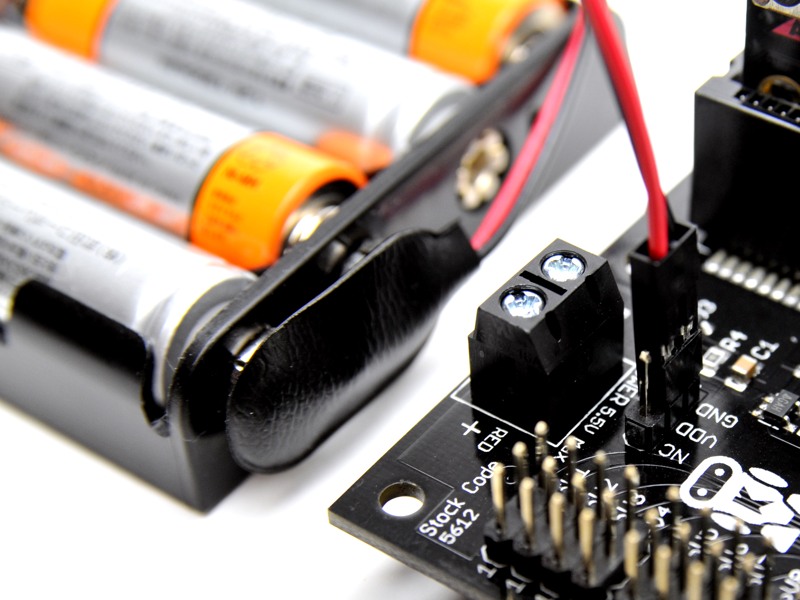
電源を取り付けます。図2-2は、電源用のヘッダーピンに充電式ニッケル水素電池4本(4.8V)を取り付けた例です。ボード上の刻印(VDD・GND)に合わせて接続します。
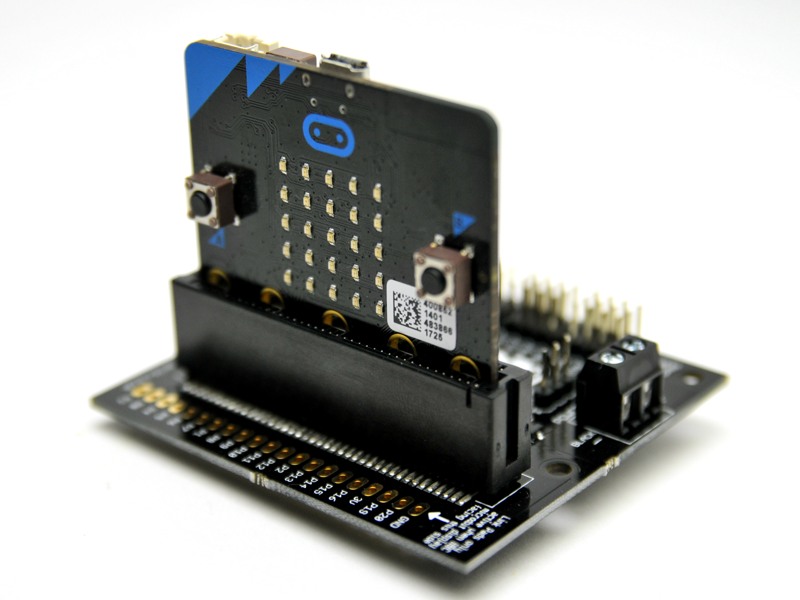
micro:bitの取り付け
micro:bitを取り付けます。
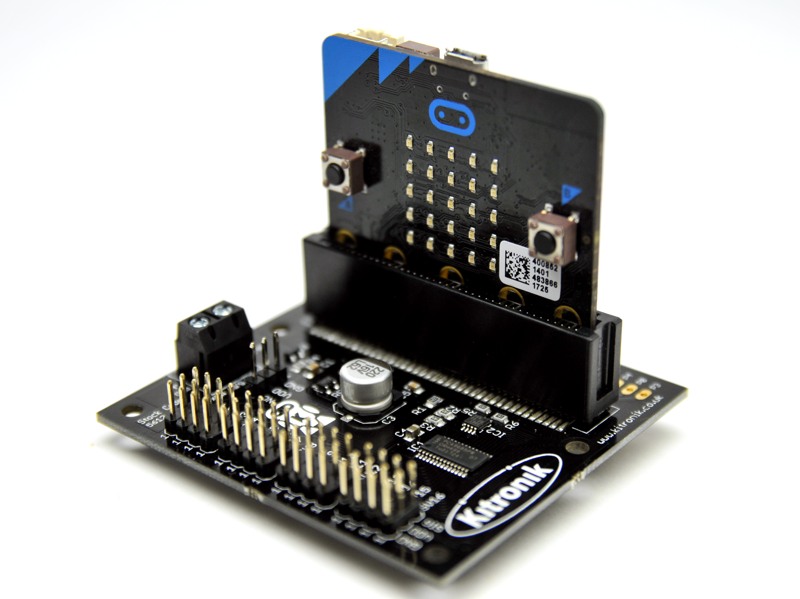
エッジコネクターを引き出したパッドを使用する場合は、図2-4のように取り付けます。
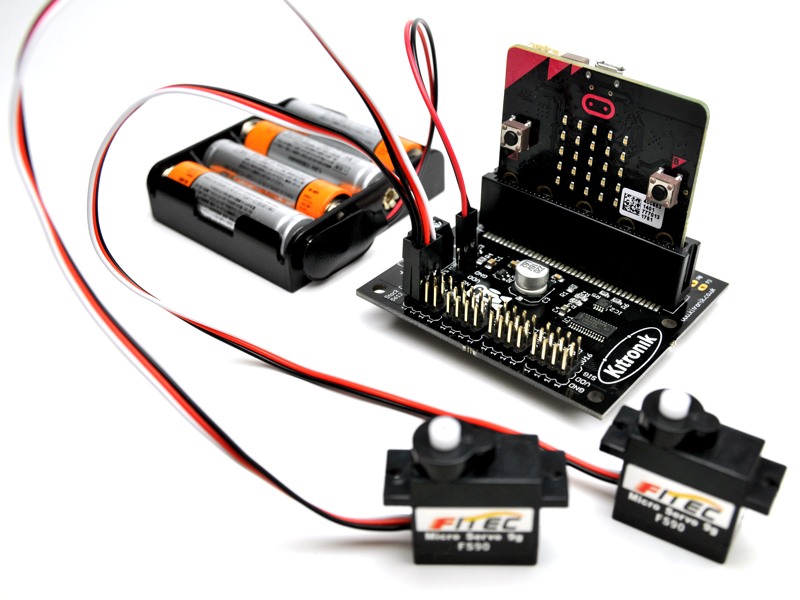
接続例
2個のサーボモーターを接続した例です。
3.プログラミング
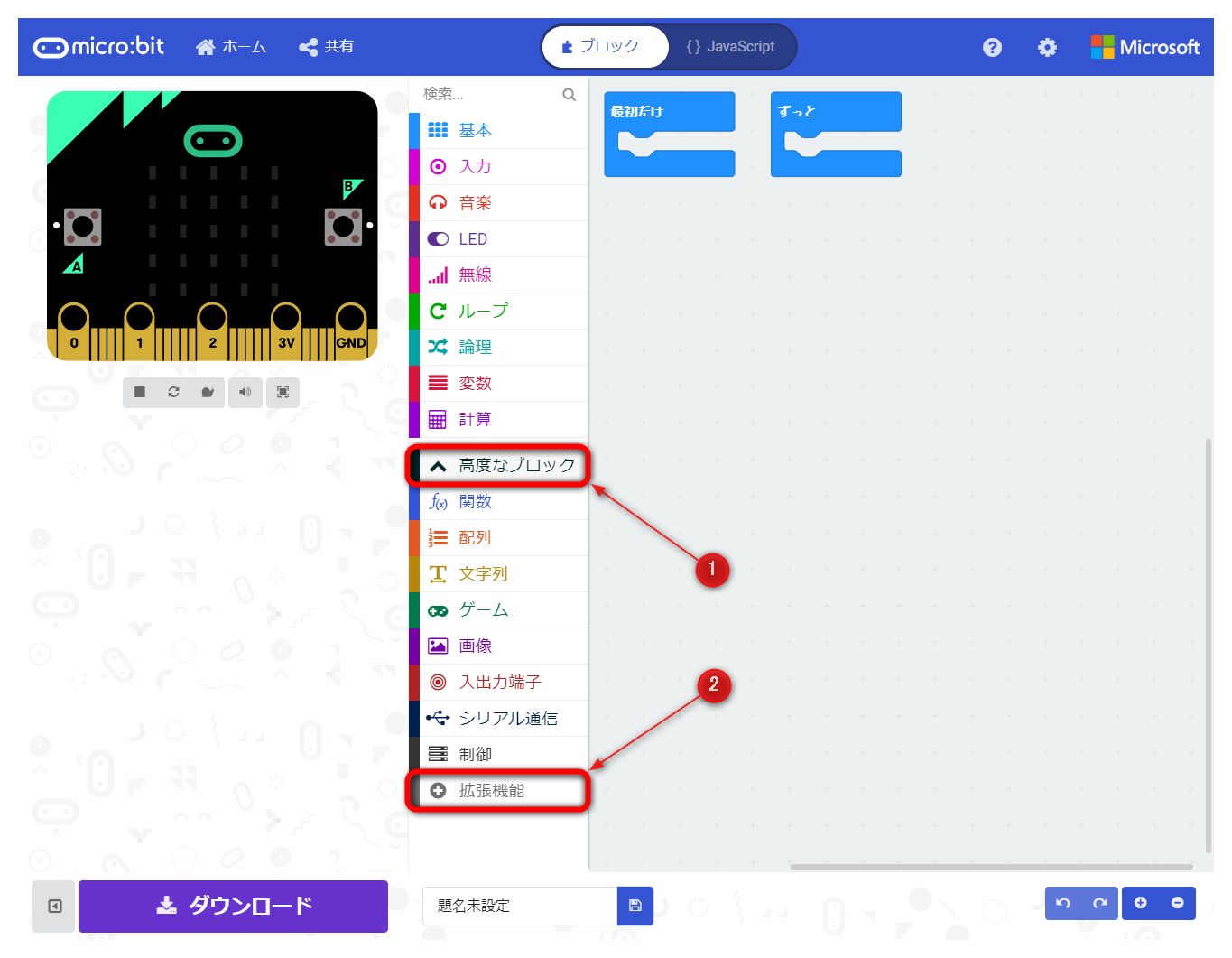
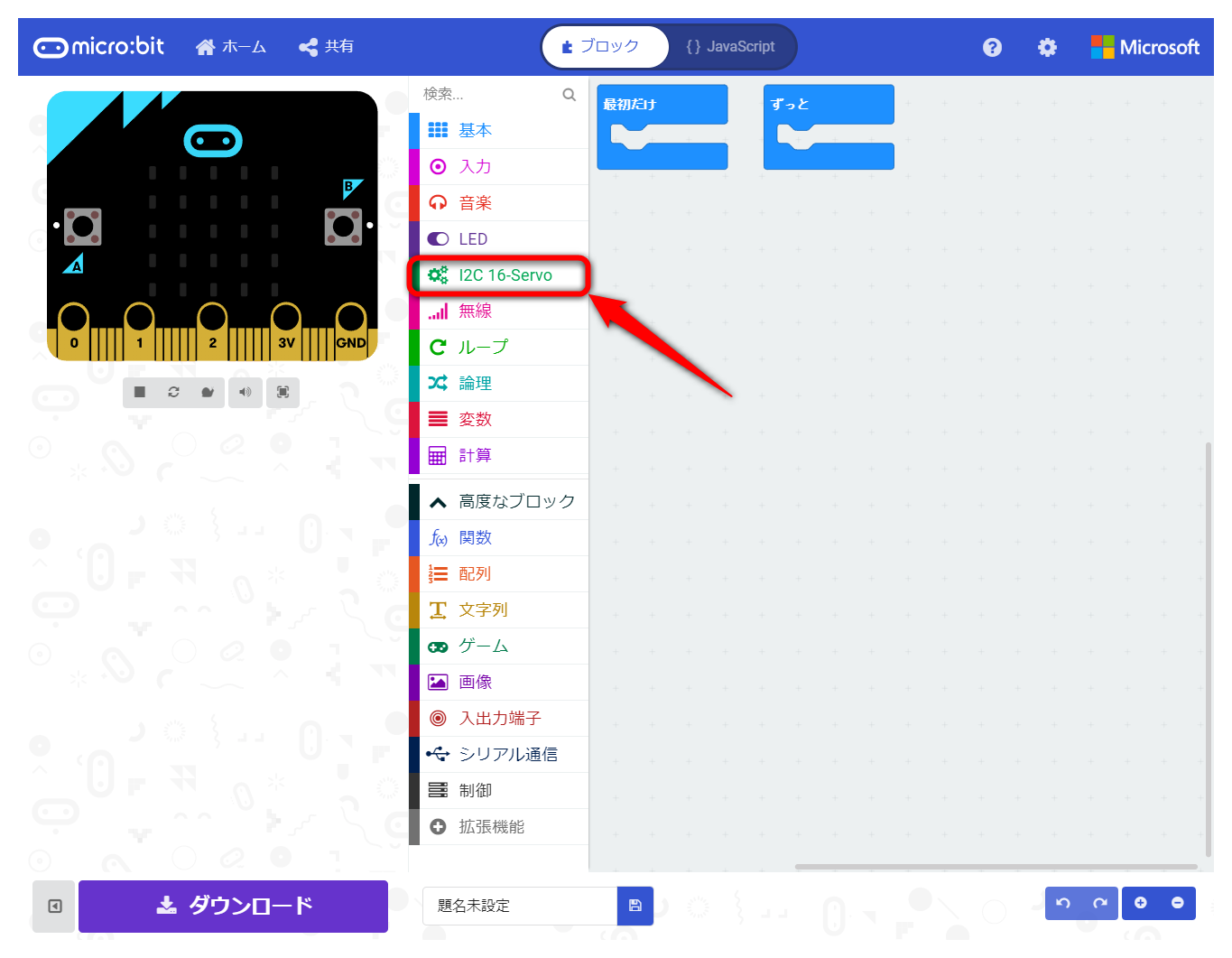
まず、拡張ボード「16 Servo Driver Board」用のパッケージをダウンロードします。[高度なブロック]>[拡張機能]の順にクリックします。
「16 servo」と入力して、虫眼鏡ボタンをクリックします。
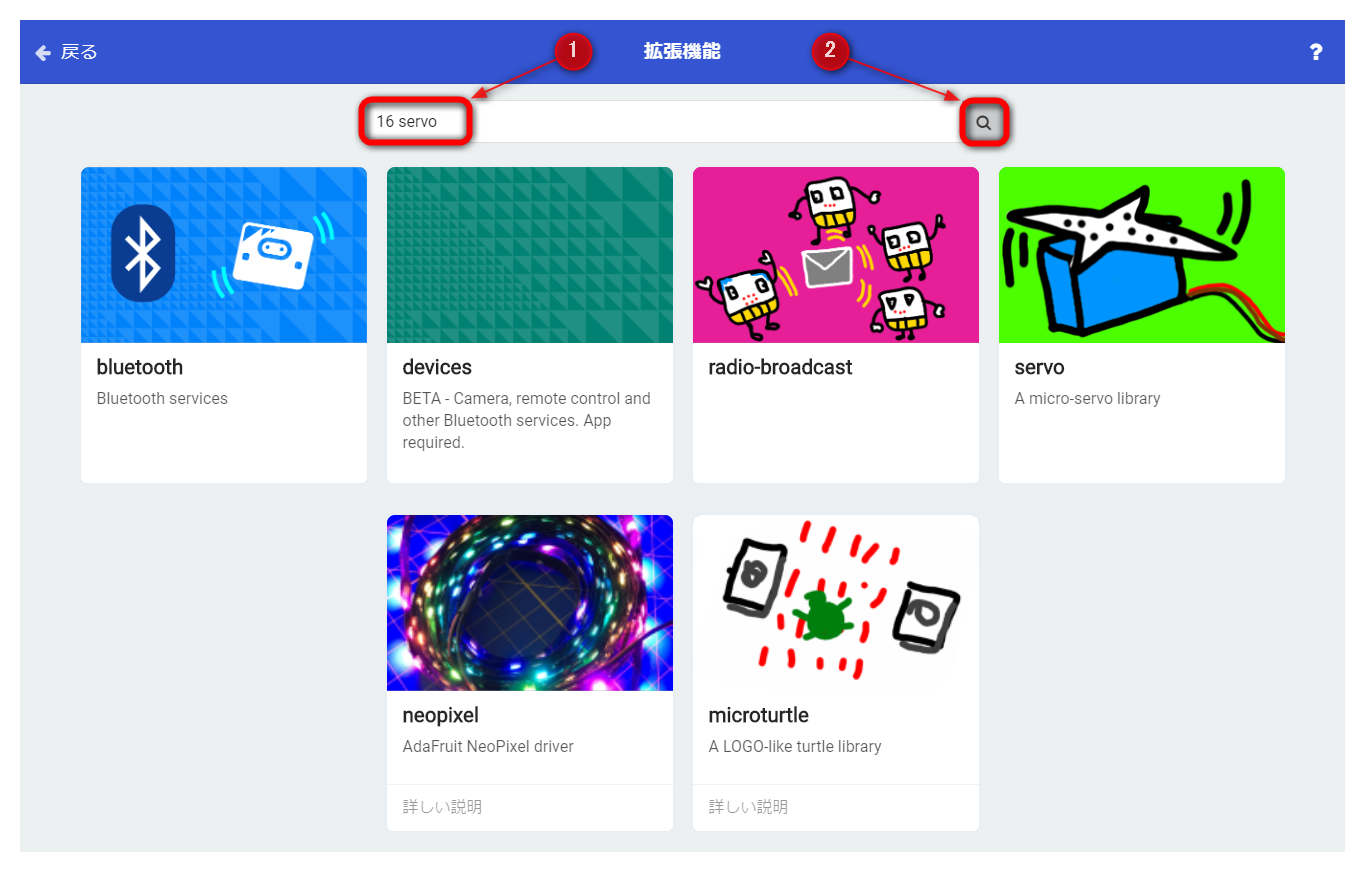
「kitronik-I2C-16-servo」をクリックします。

「I2C 16-Servo」が追加されたことを確認します。
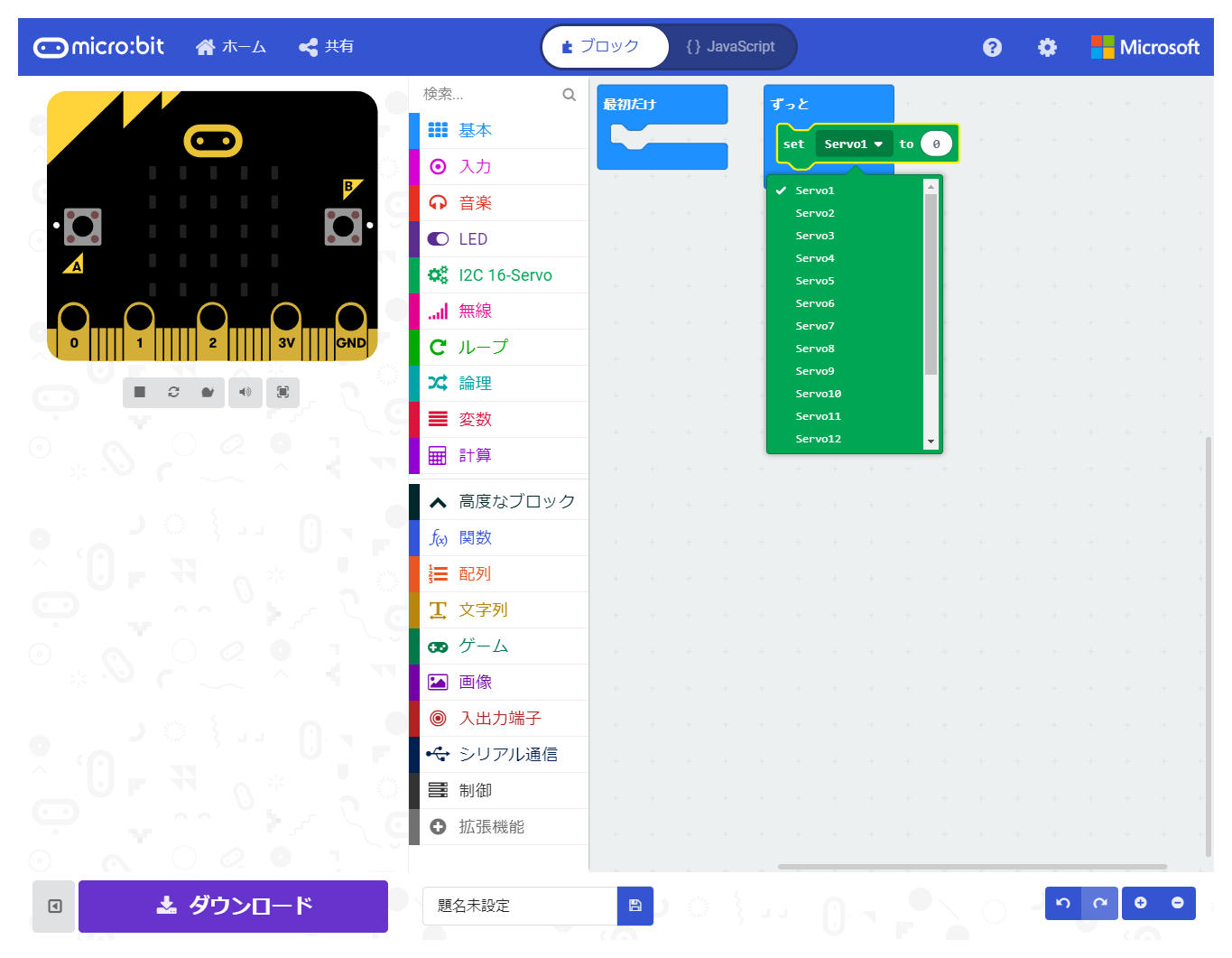
「I2C 16-Servo」をクリックして、「set」ブロックを選択します。
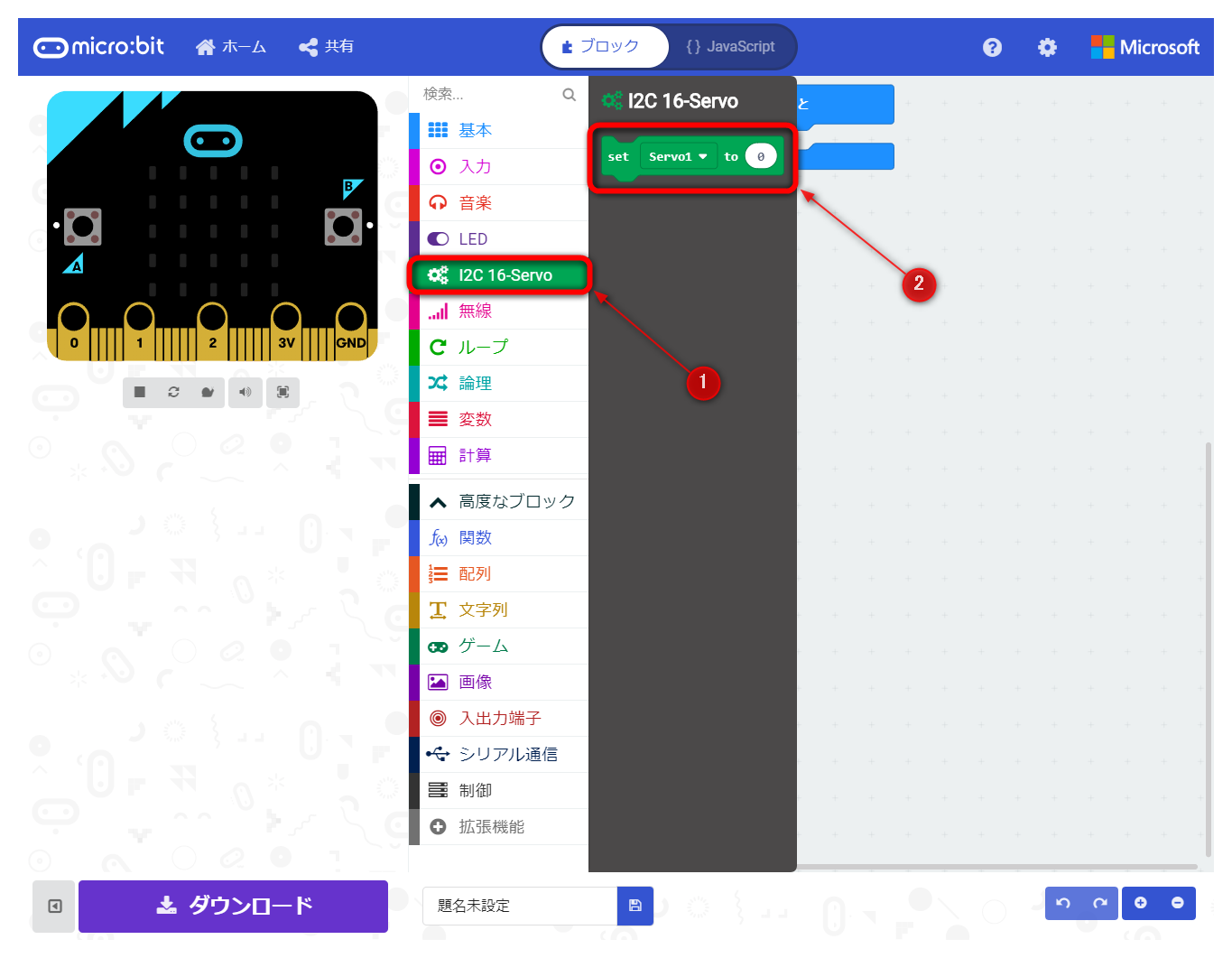
「set」ブロックで、制御するサーボモーターと角度を指定します。
micro:bit関連のおすすめ品
micro:bitを使って、最大16台までのサーボモーターを制御できるKITRONIK社の拡張ボード「16 Servo Driver Board」です。
質量11グラムのデジタルサーボ。ギヤおよびアーム(ホーン)は、炭素繊維配合POM樹脂でできており、従来のSG90のギアセットよりも耐久性とトルクが増しています。

汎用のアナログマイクロサーボモーターです。サーボホーンやネジが同梱されています。900µsと2100µsの間の標準サーボパルスで、120度の動作角を位置制御します。







