Robot:Bit V2.0
micro:bitでLEGOを動かすために必要な拡張ボードの一つ、KittenBot社のRobot:Bit V2.0を紹介します。
1.Robot:Bit V2.0の紹介
micro:bitでLEGOを動かすために必要な拡張ボードの一つ、KittenBot社のRobot:Bit V2.0を紹介します。
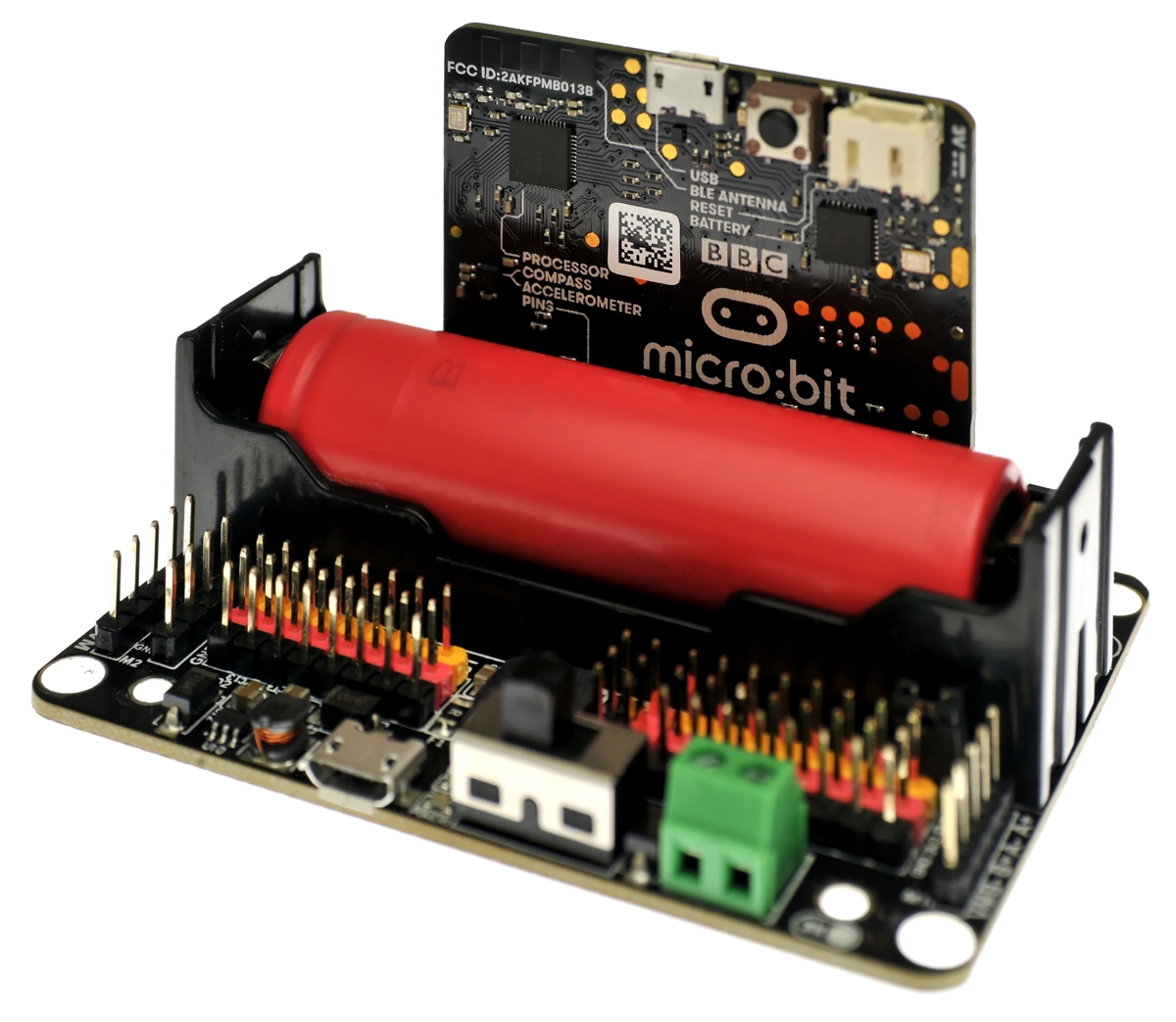
Robot:Bit V2.0
KittenBot社のRobot:Bit V2.0は、8個のサーボモーター端子・4個のDCモーター端子(または2個のステッピングモーター端子として使用)・8個の入出力端子・1つのI2C端子・ブザーを備えた、micro:bit用の拡張ボードです。
基板の四隅に、LEGOと接続するための穴があります。基板上に18650型充電池が収まるバッテリーボックスと充電回路を搭載しているので、このままLEGOに組み込んで、DCモーターやサーボモーターを駆動することができます。LEGOに組み込み可能なDCモーターとサーボモーターについては、後述します。
2.各部の詳細
Robot:Bit V2.0の各部について、詳しく紹介します。
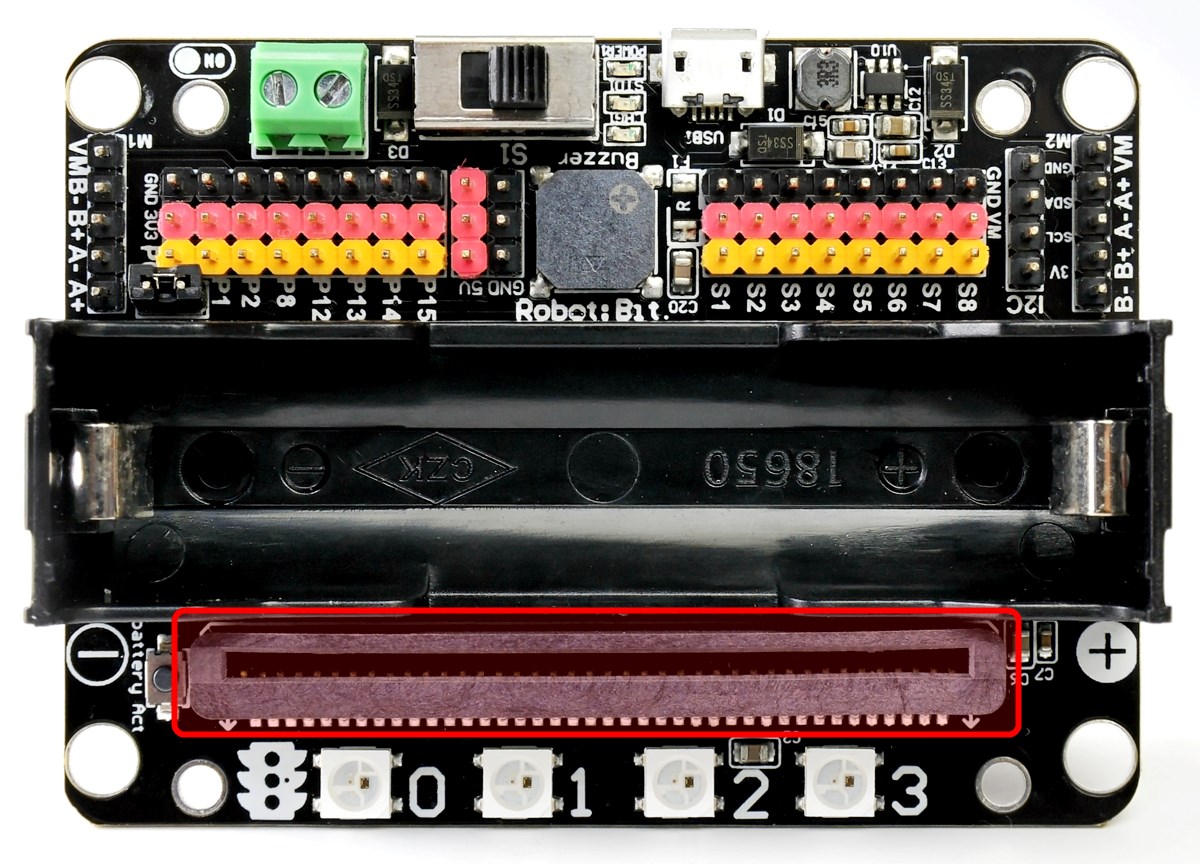
エッジコネクター
micro:bitを差し込むエッジコネクターです。
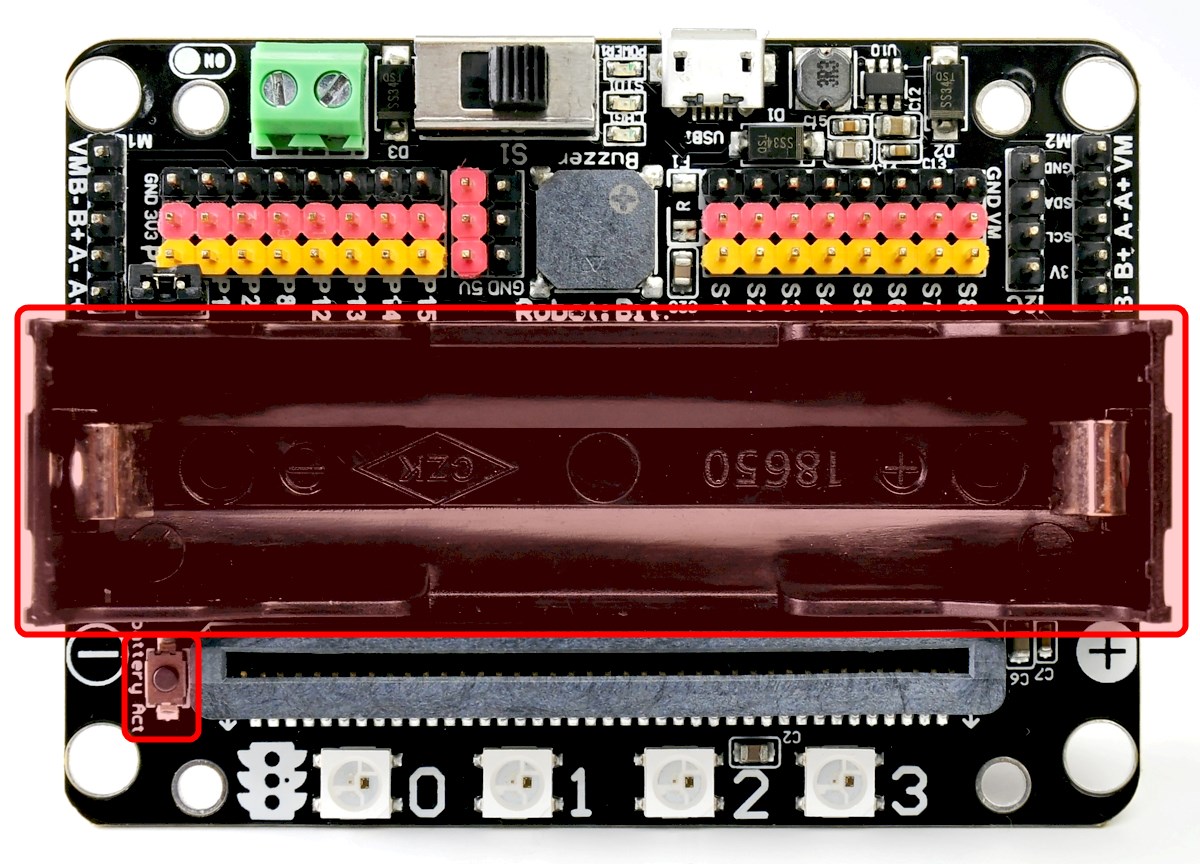
バッテリーボックス
18650型充電池が収まるバッテリーボックスを搭載しています。プラス(+)とマイナス(-)の向きを間違えないように注意します。バッテリーボックス内に「+」と「-」の刻印があります。
18650型充電池の交換時や、過電流・過放電による保護モードからの復帰には、基板上のBattery Actボタンを押して、電源管理システムを有効にします。
サーボモーター端子
サーボモーターを接続するピンヘッダー(S1・S2・S3・S4・S5・S6・S7・S8)があります。最大8個のサーボモーターを接続することができます。
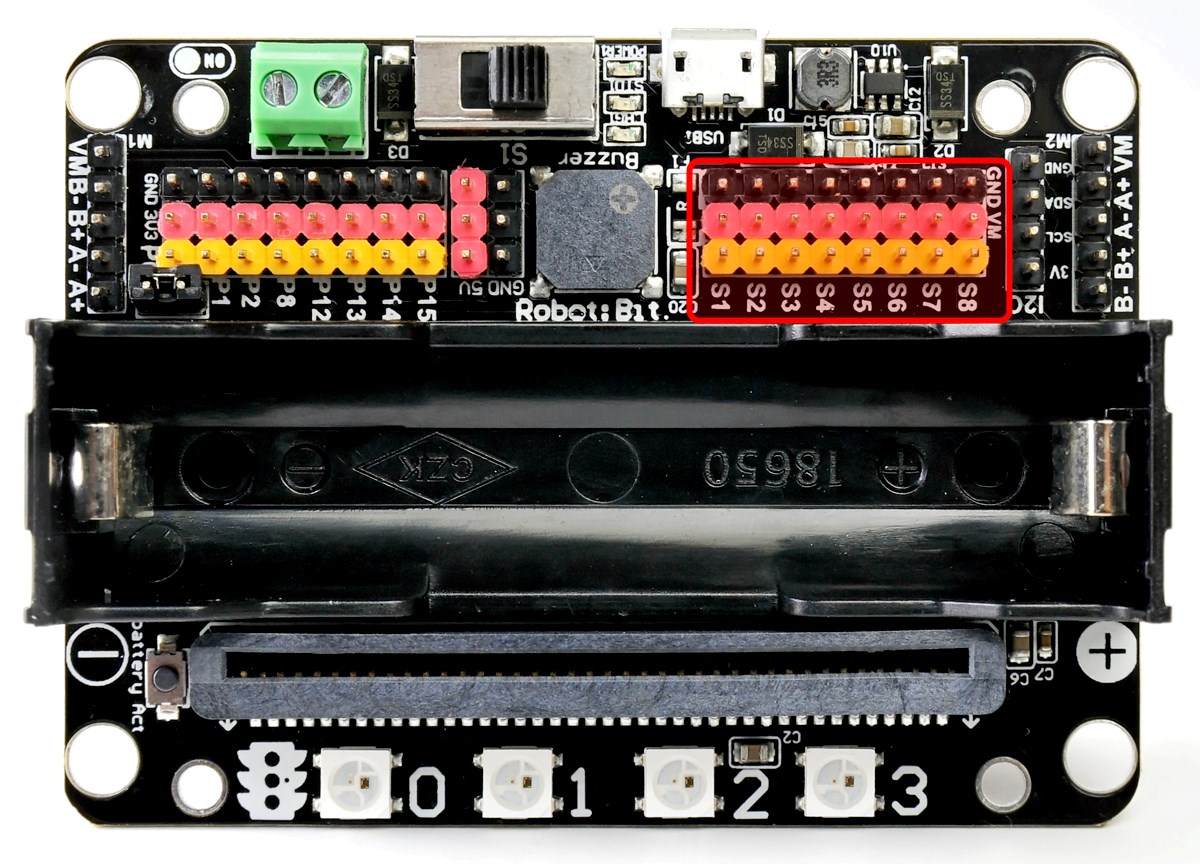
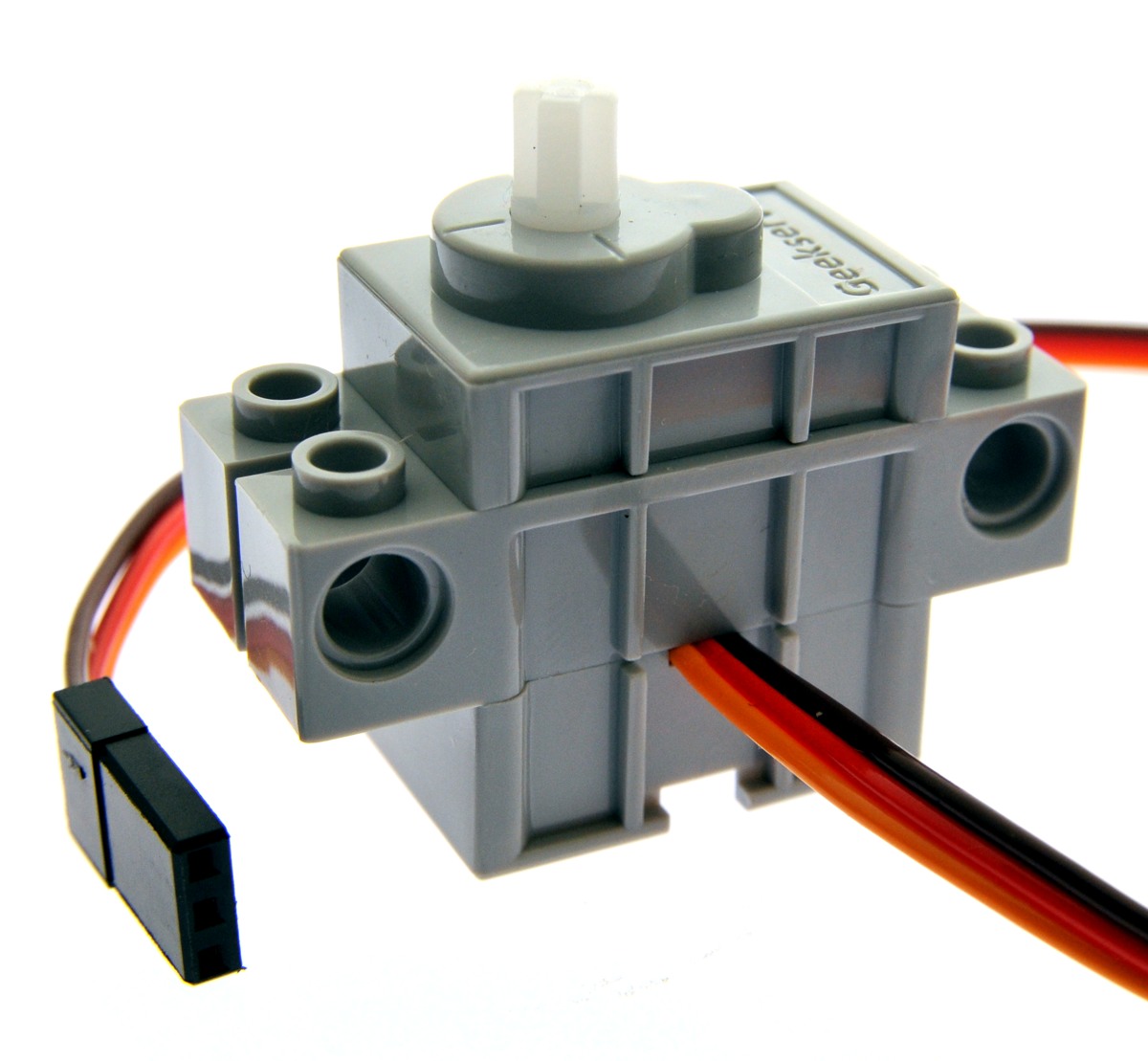
「11-2.Super:bitに接続できる2種類のモーター」で紹介しているサーボモーター(Gray Servo)が接続できます。
DCモーター(ステッピングモーター)端子(M1・M2)
4個のDCモーター(または、2個のステッピングモーター)を接続する端子(M1・M2)です。5ピンのピンヘッダー(A+・A-・B+・B-・VM)で、DCモーターを使用するときは、A+・A-(または、B+・B-)に接続します。それぞれ、M1A(M1のA+・A-に接続するという意味)・M1B・M2A・M2Bと表記します。
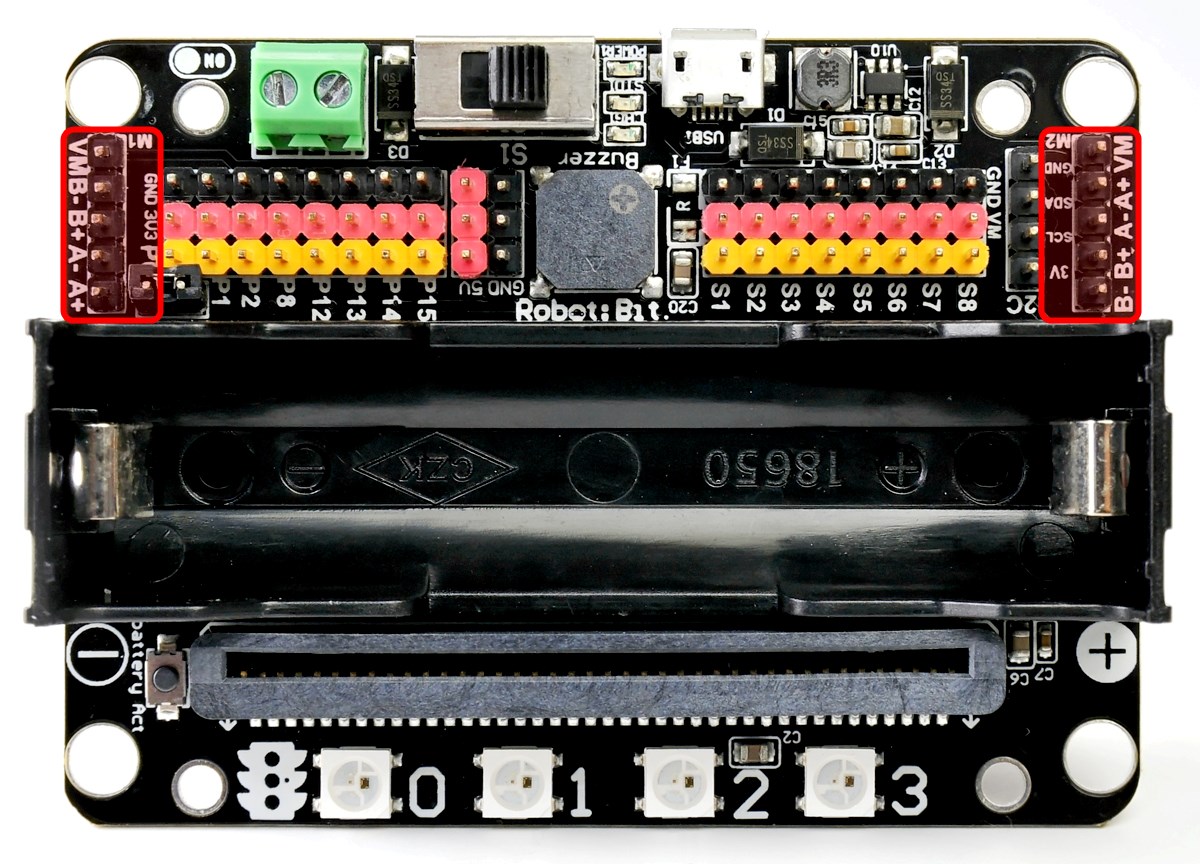
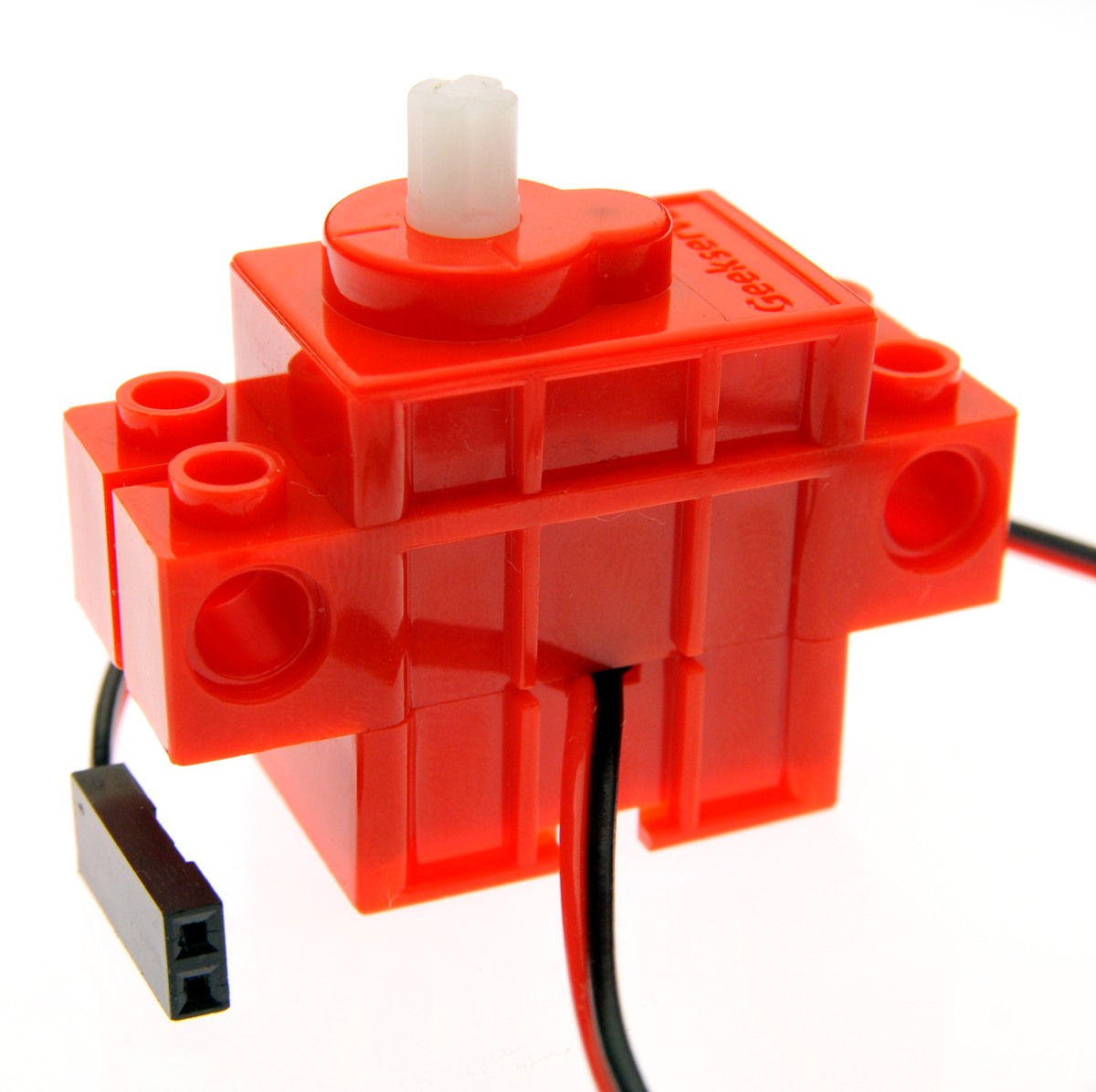
「11-2.Super:bitに接続できる2種類のモーター」で紹介しているDCモーター(Red motor)が接続できます。
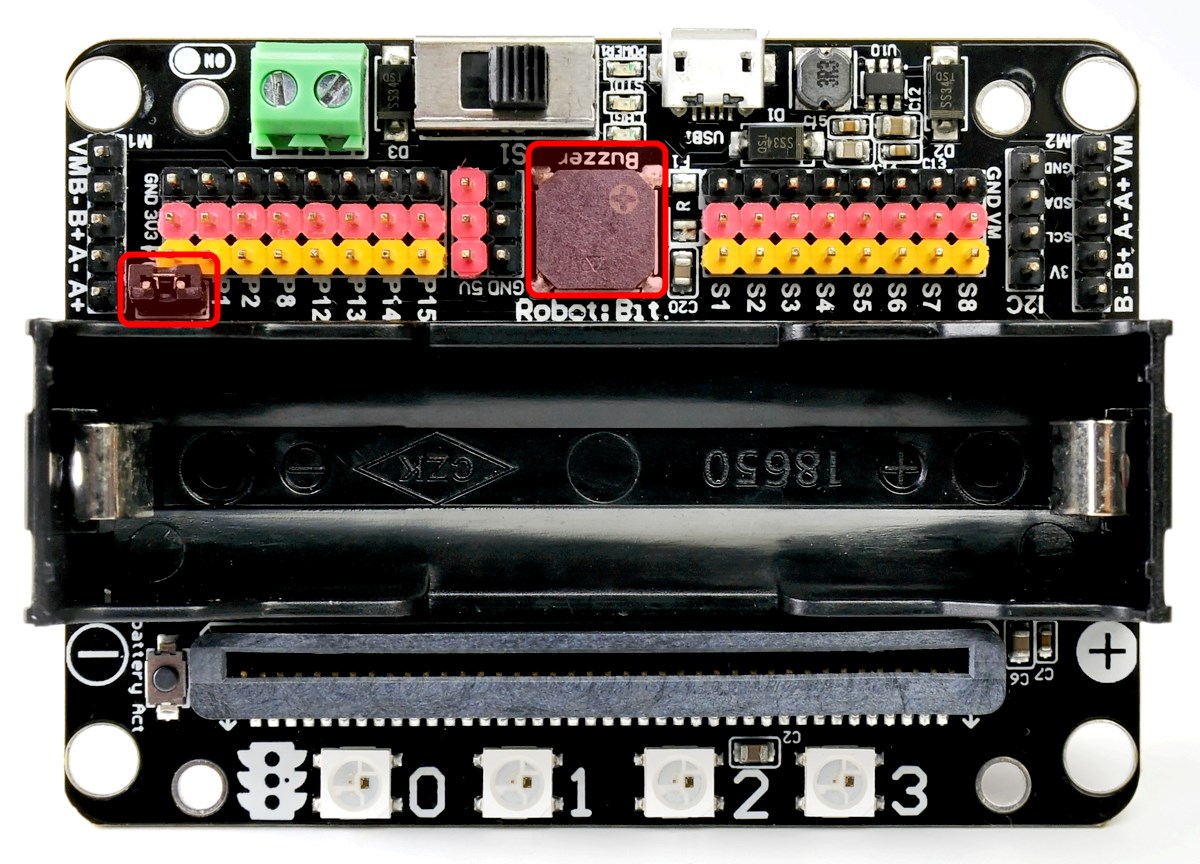
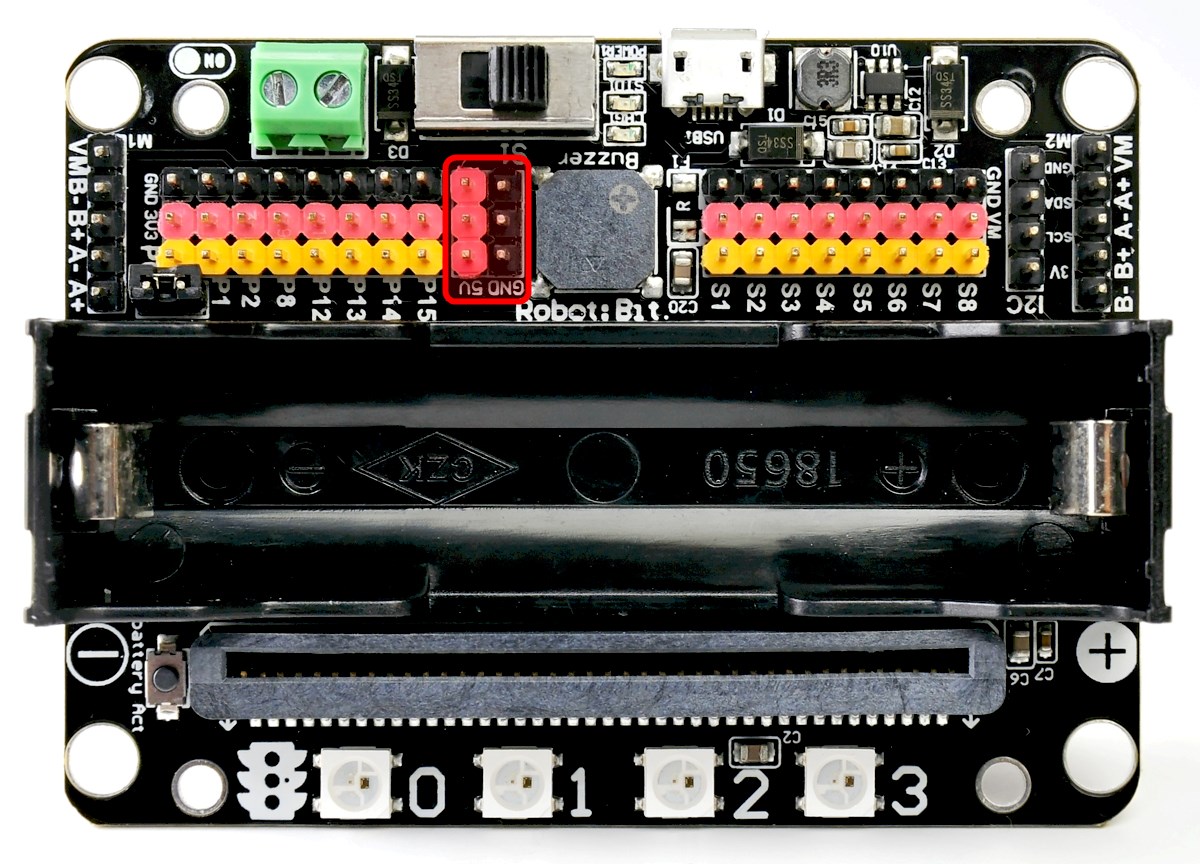
ブザー(Buzzer)とブザー接続用ジャンパー
ブザー(Buzzer)とブザーをP0に接続するジャンパーです。
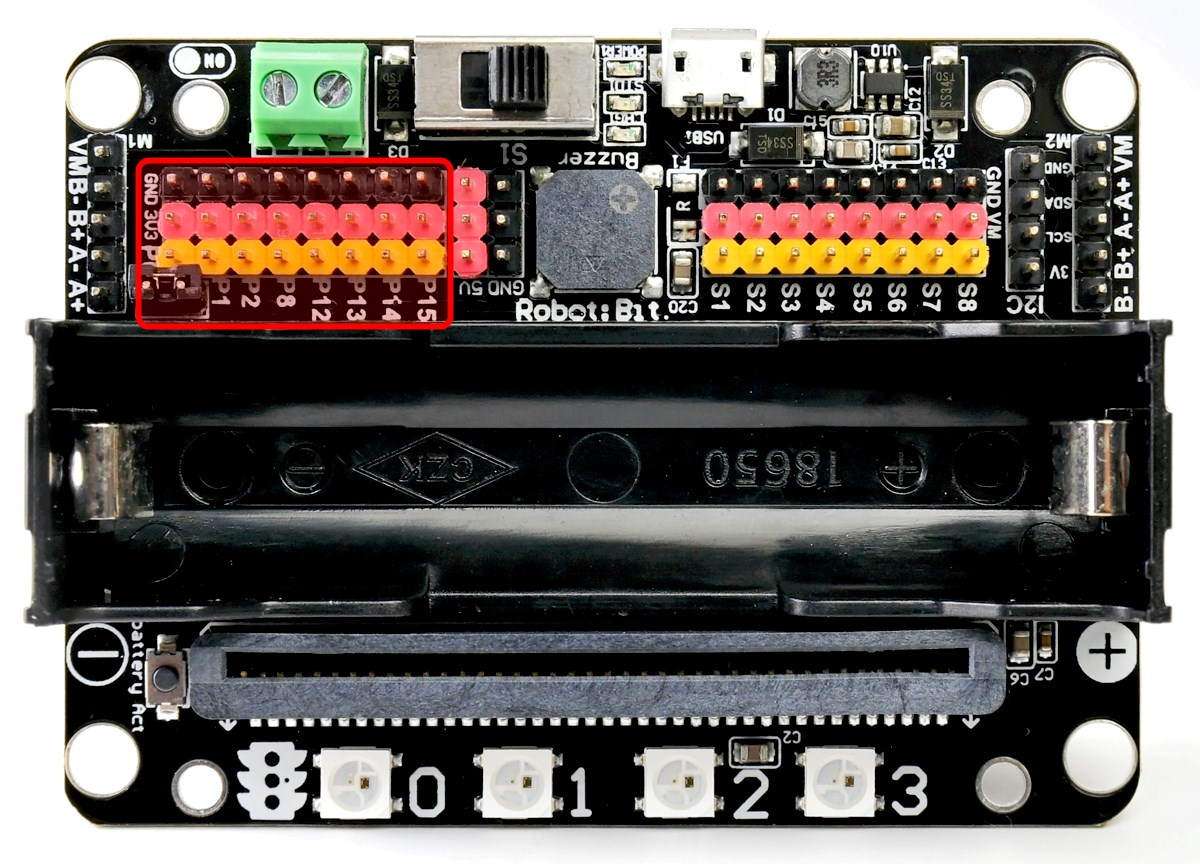
入出力端子(P0・P1・P2・P8・P12・P13・P14・P15)
micro:bitのP0・P1・P2・P8・P12・P13・P14・P15に接続された端子です。3ピンのピンヘッダーで、GND・3.3V・信号線となっています。P0は、あらかじめジャンパーでブザー(Buzzer)に接続されています。
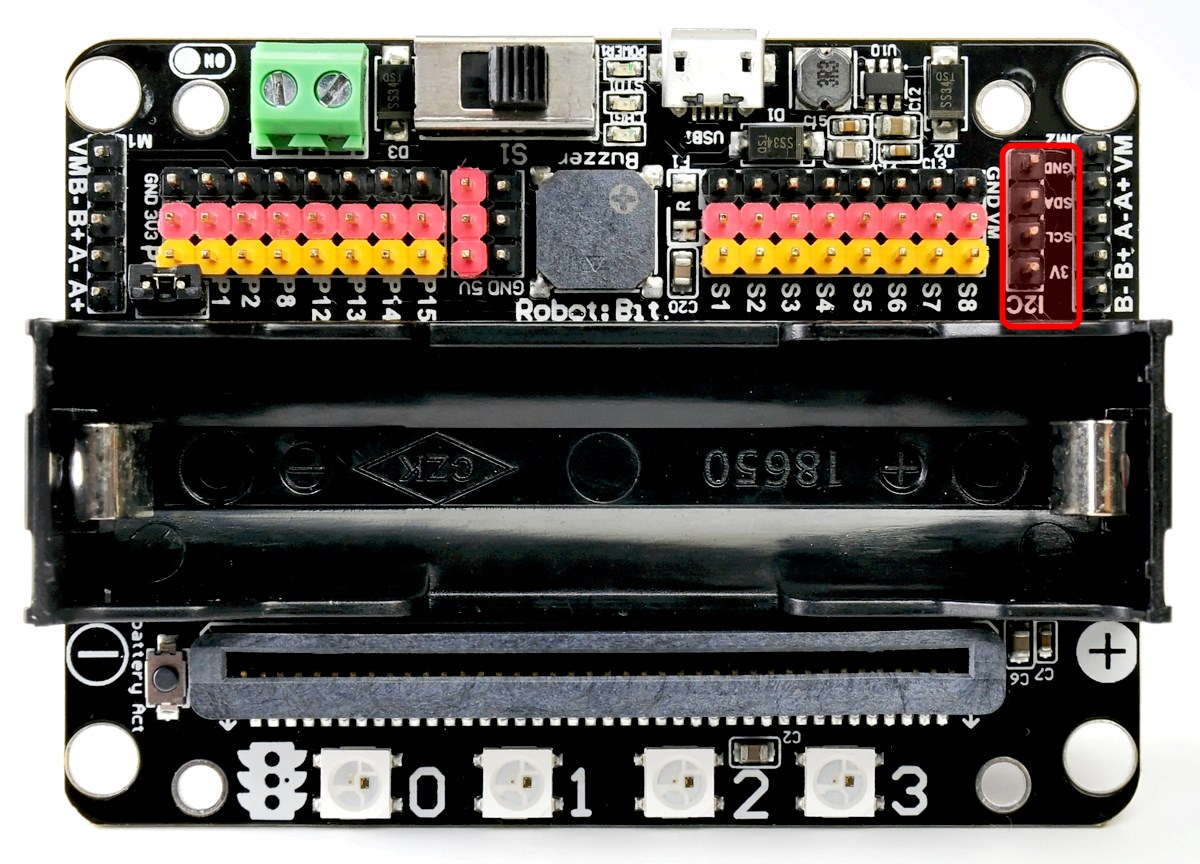
I2C端子(I2C)
4ピンのピンヘッダーで、ピンの割り当ては3V・SCL(P19)・SDA(P20)・GNDとなっています。
外部電源端子
外部電源を接続する端子です。入力電圧は、3V~5Vです。プラス(VM)とマイナス(GND)の表示は、基板の裏側にあります。

5V出力端子
5Vを出力する端子です。2ピンのピンヘッダーで、3組あります。
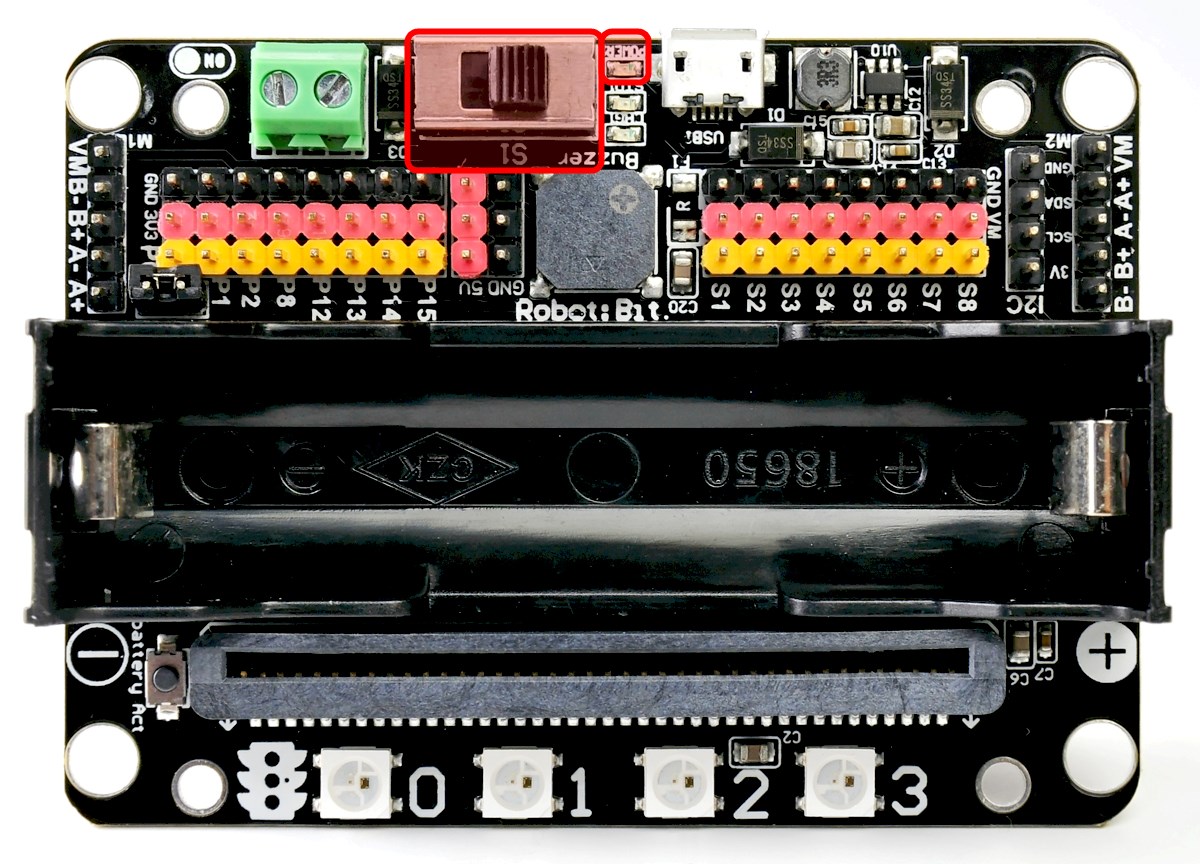
電源スイッチ(S1)
スライド式のスイッチです。オン時に赤色のLED(POWER1)が点灯します。
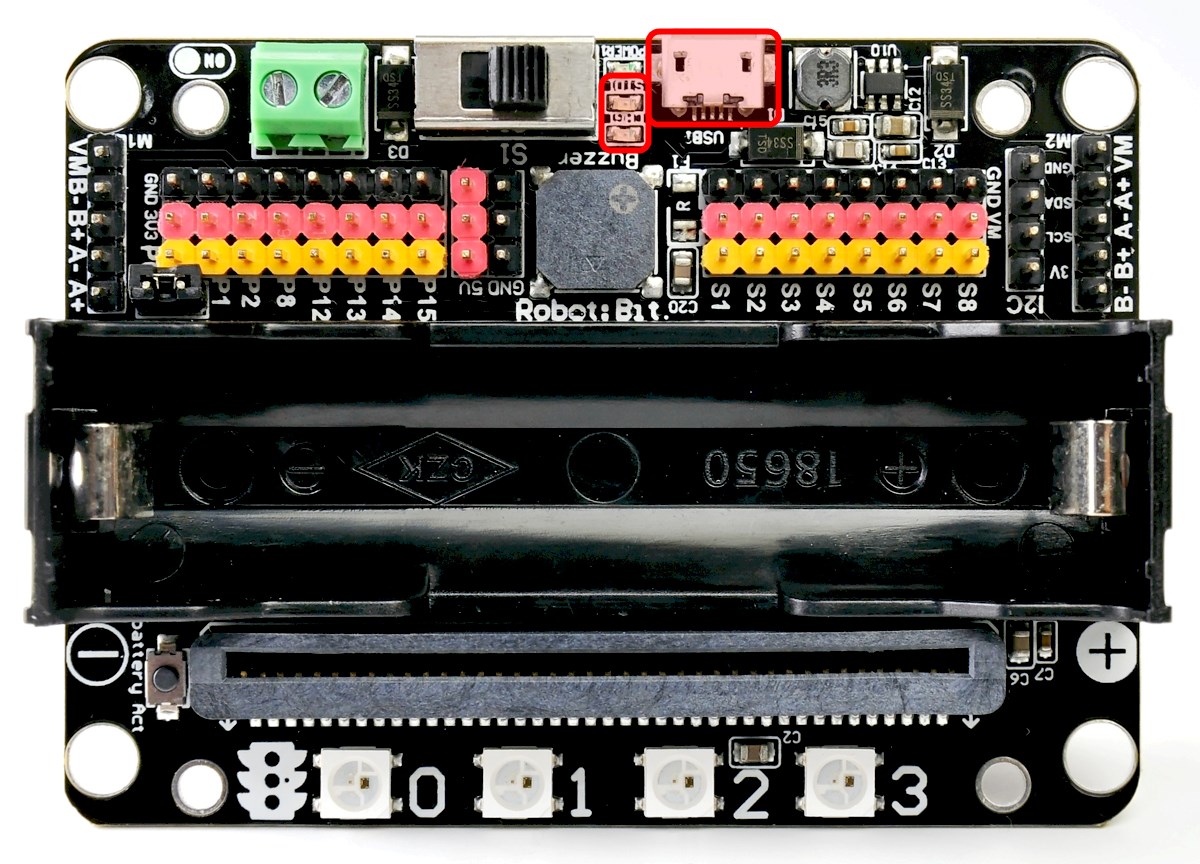
充電端子(Charge)
充電池を充電するための回路が内蔵されています。USBケーブルを使って充電することができます。充電中は赤色のLED(CHG1)、満充電で緑色のLED(STD1)が点灯します。
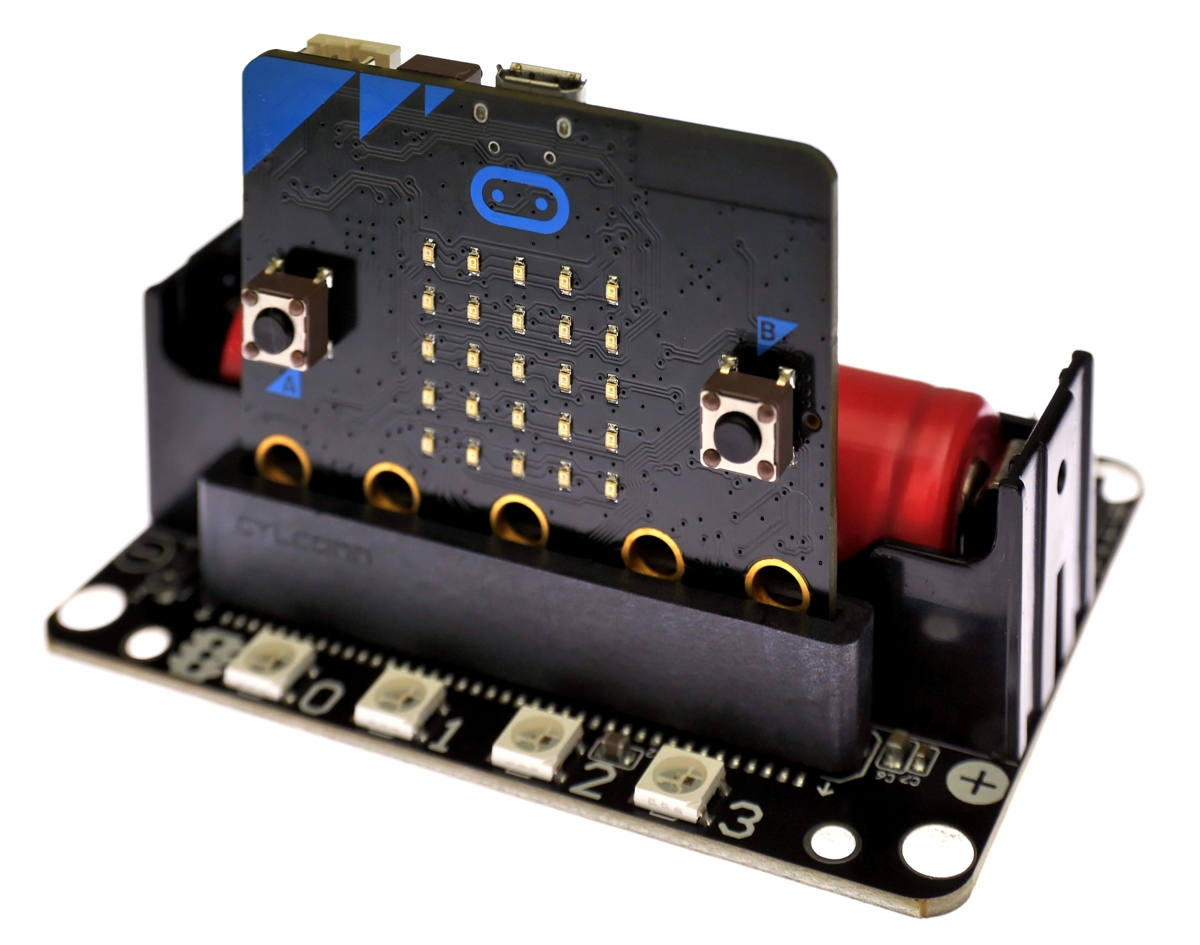
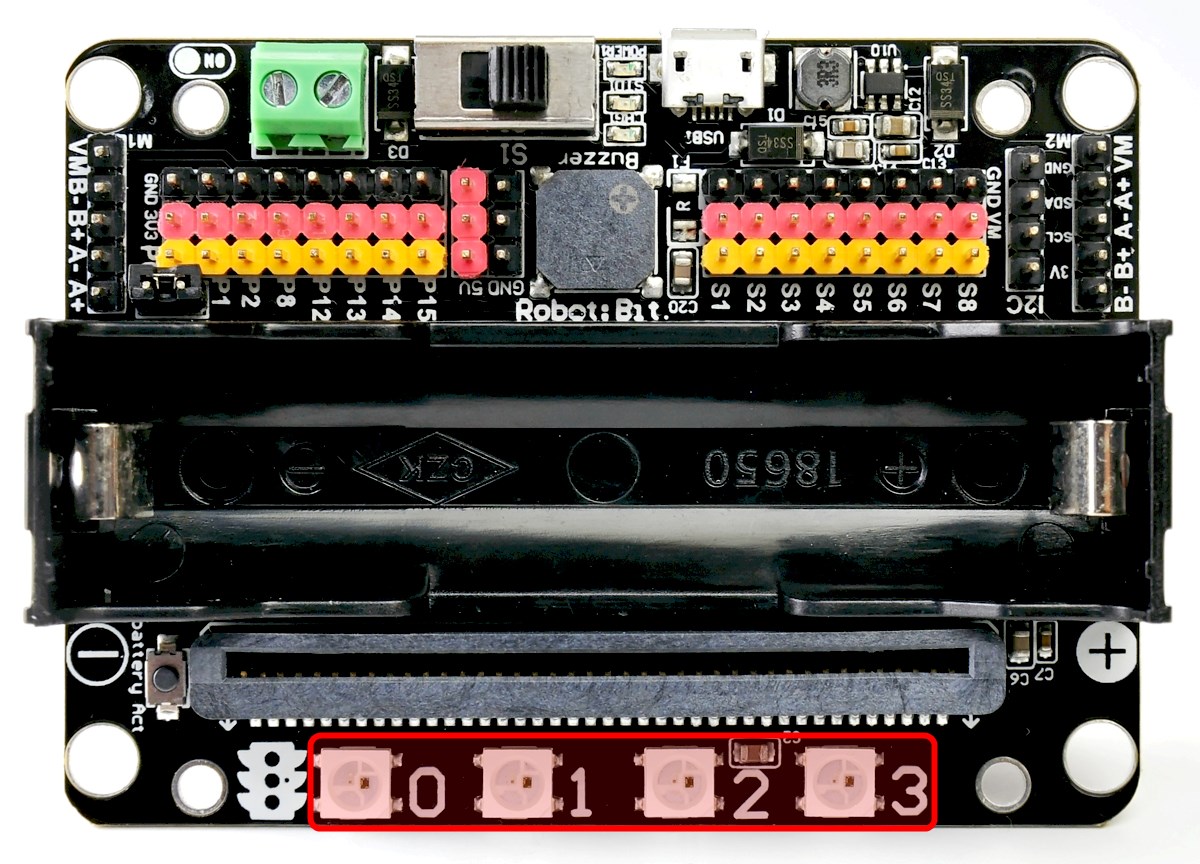
RGB LED
4個のRGB LEDを搭載しています。端子P16に接続されています。NeoPixelの拡張機能を使って点灯させることができます。
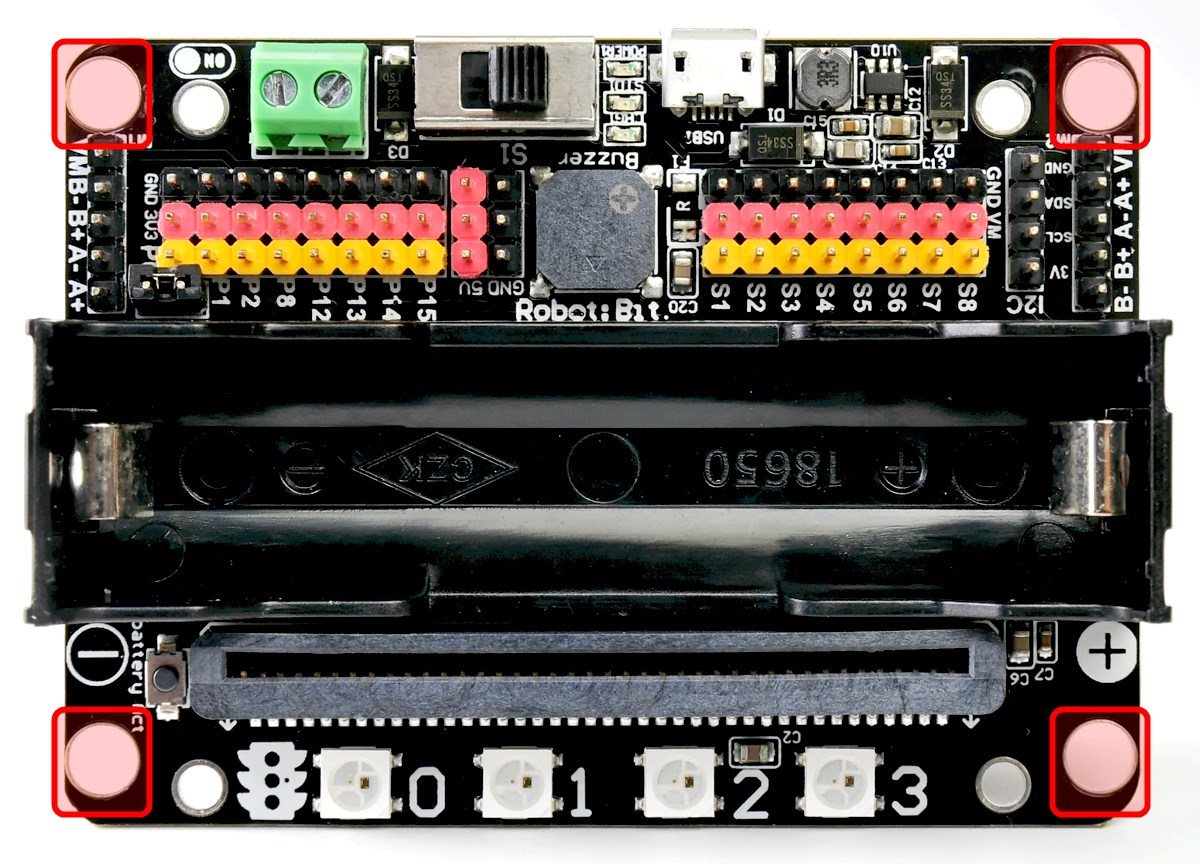
LEGO接続用の穴
基板の四隅に、直径4mm程度の穴が開いています。この穴がLEGOと接続するためのもので、LEGOテクニックシリーズのコネクターペグを差し込むことができます。コネクターペグを使うことで、他のLEGOパーツと接続することができます。
コネクターペグ
コネクターペグは、テクニックシリーズのパーツ同士を接続するためのものです。コネクターペグには、滑り止めあり・なしの2種類があり、滑り止めありのものには、小さな突起がついています。滑り止めあり・なし、いずれも使用できます。
図11-6-2-16のコネクターペグは、黒が滑り止めあり(突起あり)、グレーが滑り止めなし(突起なし)です。

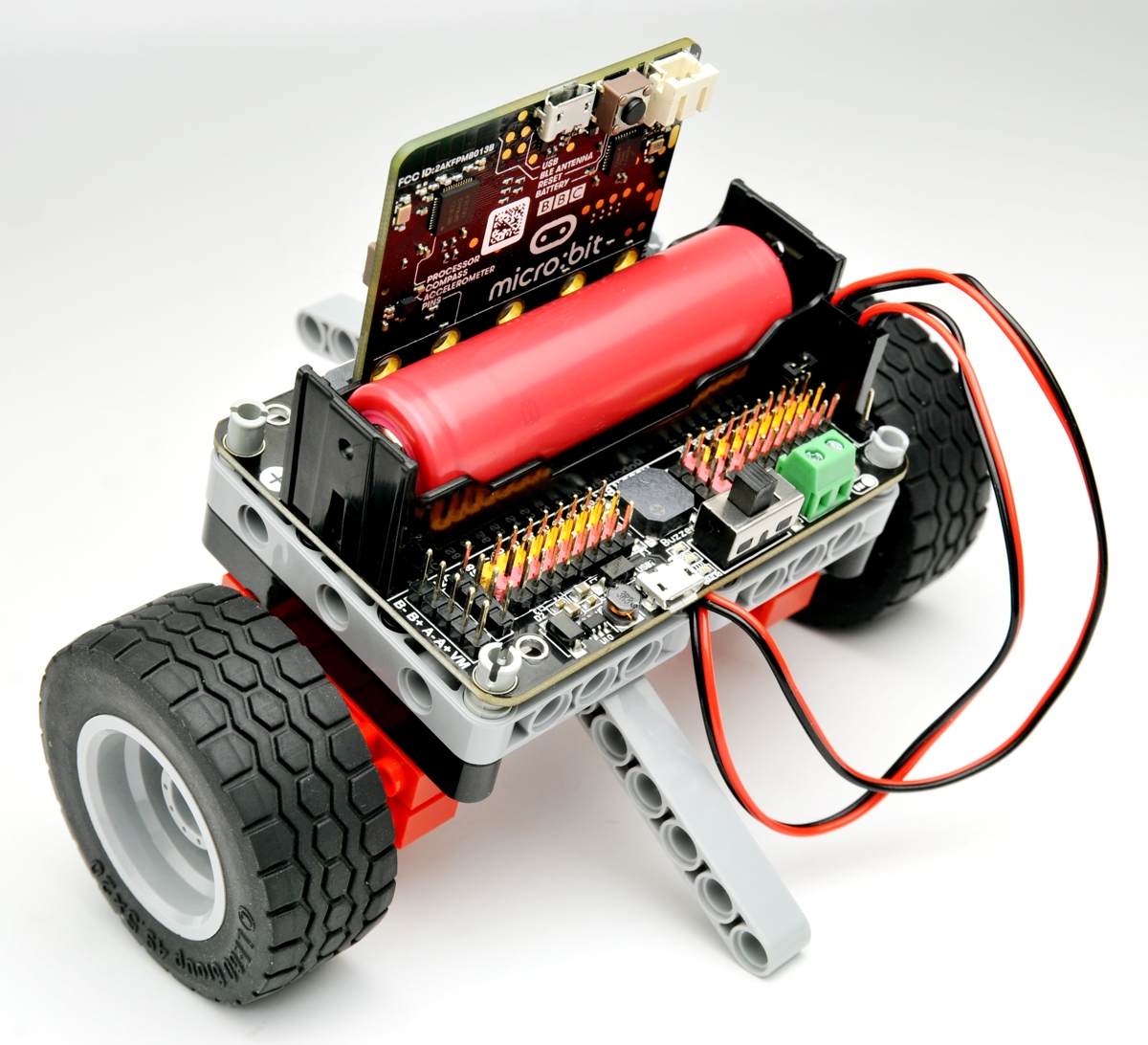
3.作品例
DCモーター(Red motor)を2個使った作品例です。左右のタイヤ(DCモーター)の回転速度と回転方向をプログラミングすることで、前進・後進・左右への旋回・その場で回転などの動作が行えます。