【HUSKYLENS】micro:Maqueen Plusへの取り付け(ブラケットあり)
HUSKYLENS(AI Vision Sensor)を、micro:Maqueen Plusに取り付けてAIカーを作る手順を紹介します。本記事は、HUSKYLENSに付属のブラケットを使って、micro:Maqueen Plusの金属板(拡張ブラケット)へ取り付けます。
13-7-1.HUSKYLENSとmicro:Maqueen PlusでAIカーを作る
HUSKYLENSは、外部と接続するためのインタフェースとしてUART/I2Cポートを備えているので、micro:bit・Arduino・Raspberry Piなどの小型コンピューターと接続することができます。認識したターゲットのサイズや座標をリアルタイムに取得できるので、自律走行するロボットカーや、顔やジェスチャーに反応するインタラクティブなアプリケーションを開発できます。HUSKYLENSは「付録3-19.HUSKYLENS(AI Vision Sensor)」で詳しく紹介しています。
HuskyLens can connect to Arduino, Raspberry Pi, LattePanda, or micro:bit
Gravity: HUSKYLENS - An Easy-to-use AI Vision Sensor [Pre-order] - DFRobot
micro:bitとの接続
HUSKYLENSには「Gravity 4ピンセンサーケーブル」という4色のケーブルが同梱されていますが、コネクターの形状が異なるため、そのままmicro:bitと接続することができません。また、micro:bitの周辺装置としては、比較的消費電力が大きいため、HUSKYLENSへ安定した電力供給が必要となります。電力不足になると、HUSKYLENSが再起動を繰り返すなど不安定な動作となります。
これらの問題を解決するのが、micro:bitに取り付けて使う「拡張ボード」と呼ばれる基板です。拡張ボードには、さまざまな周辺装置と接続可能なインタフェースや安定した電力供給ができる電源、LED・ブザーなどの機能が備わっています。ただし、選択する拡張ボードによって、搭載するインタフェースや機能の種類や数が異なります。
本記事では、拡張ボードとして「micro:Maqueen Plus」を選択しました。
micro:Maqueen Plusとの組み合わせ
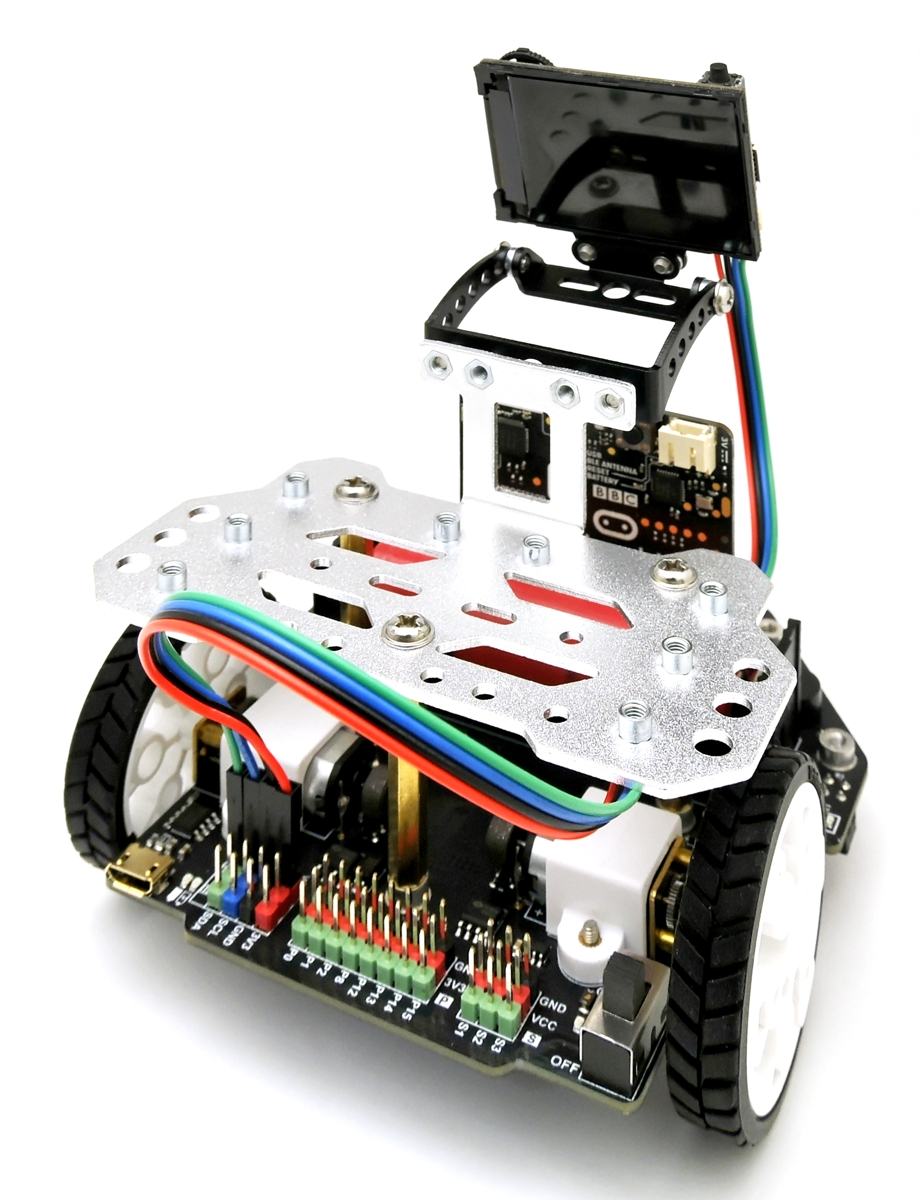
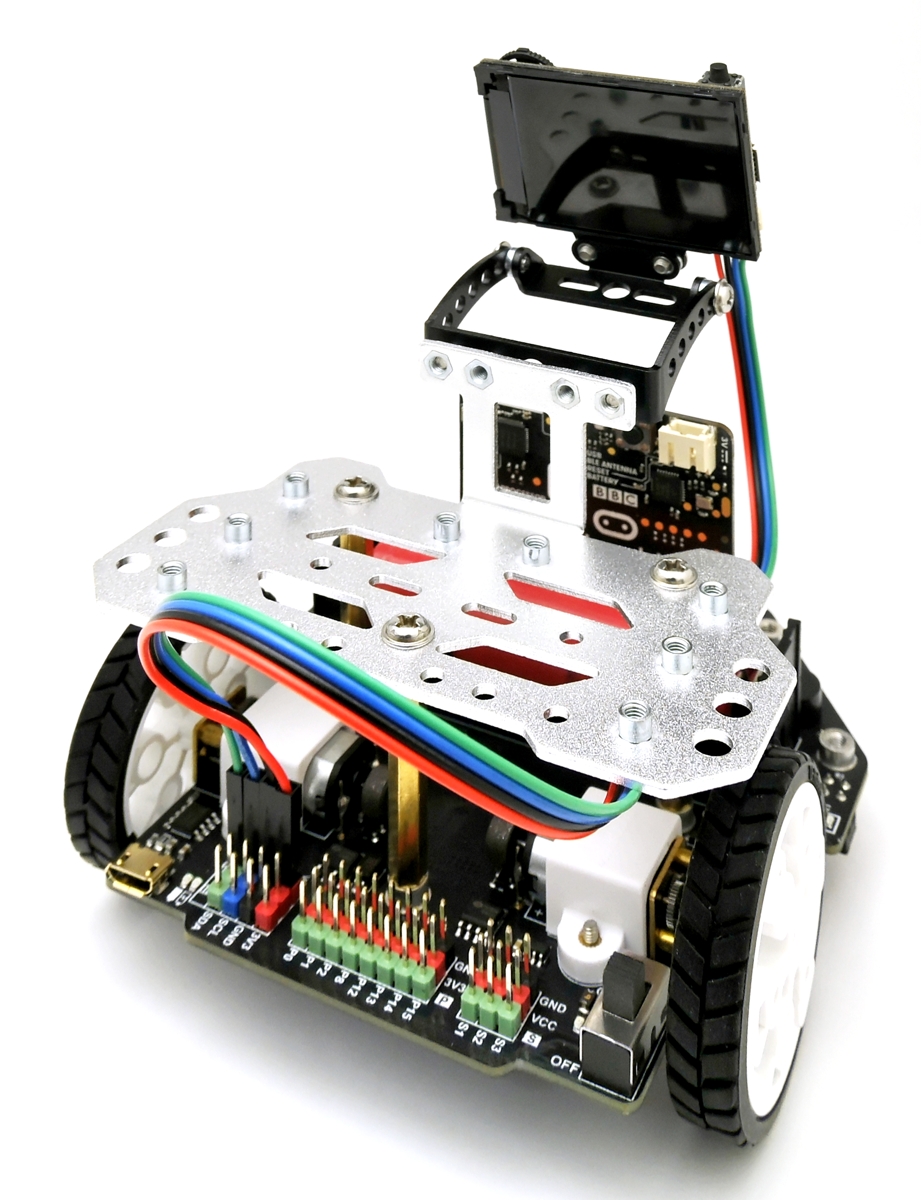
micro:Maqueen Plusは、二つの駆動輪を搭載した、いわゆるプログラミングロボットカーなのですが、さまざまな周辺装置が取り付けられる金属板(拡張ブラケット)の搭載やI2C(IIC)インタフェース・入出力(GPIO)インタフェース・サーボモーターインタフェースがヘッダピンで用意されているなど、高い拡張性が特徴です。詳しくは「付録3-27.micro:Maqueen Plus」で紹介しています。
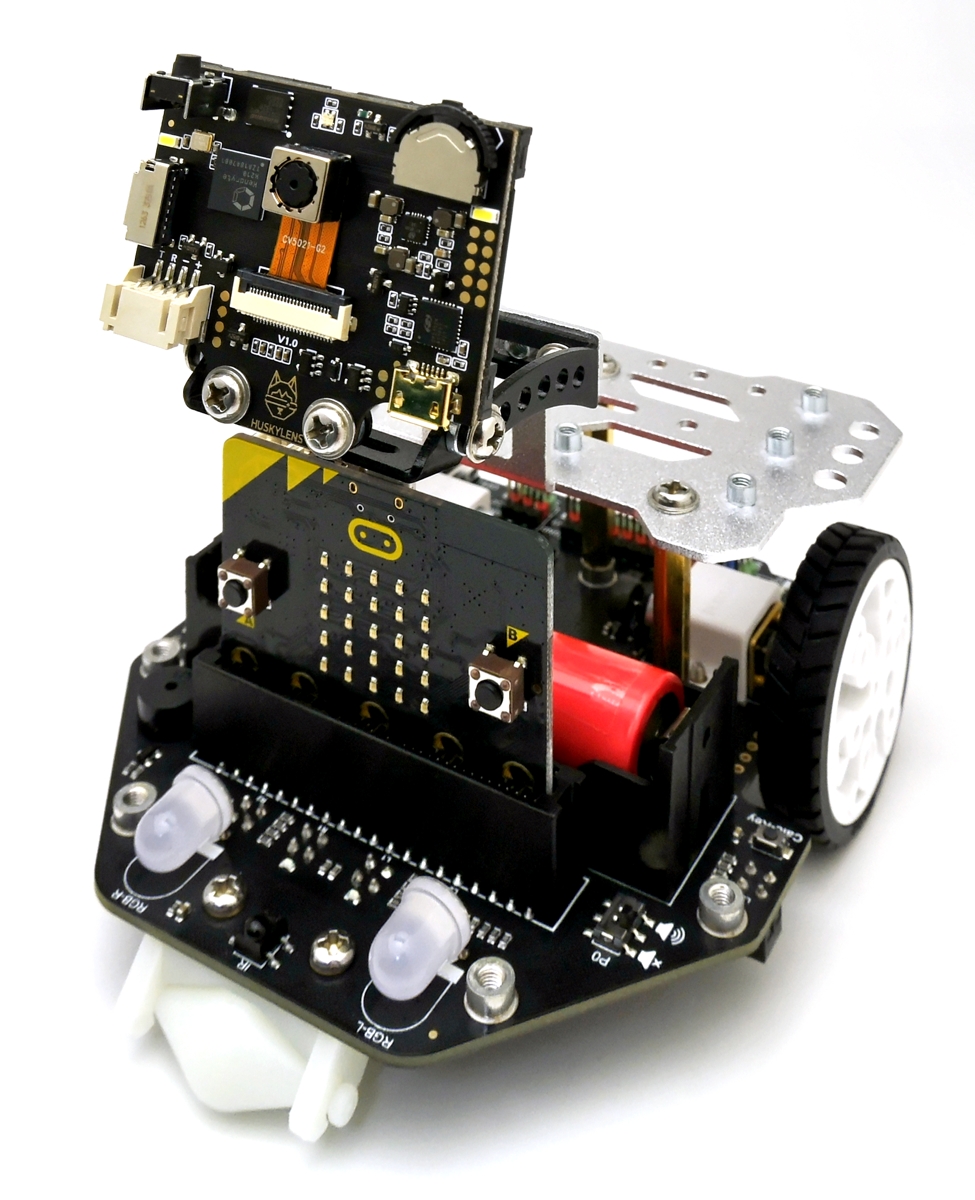
本記事では、HUSKYLENSに付属のブラケットを使って、micro:Maqueen Plusの金属板(拡張ブラケット)へ取り付けます。ブラケットを使うことで、HUSKYLENSに上下方向の角度(ぎょうふ角)をつけて、固定することができます。
I2C(IIC)インタフェースを使って、HUSKYLENSを接続します。HUSKYLENSに同梱されているGravity 4ピンセンサーケーブルと配色が同じなので、迷うことなく接続できます。
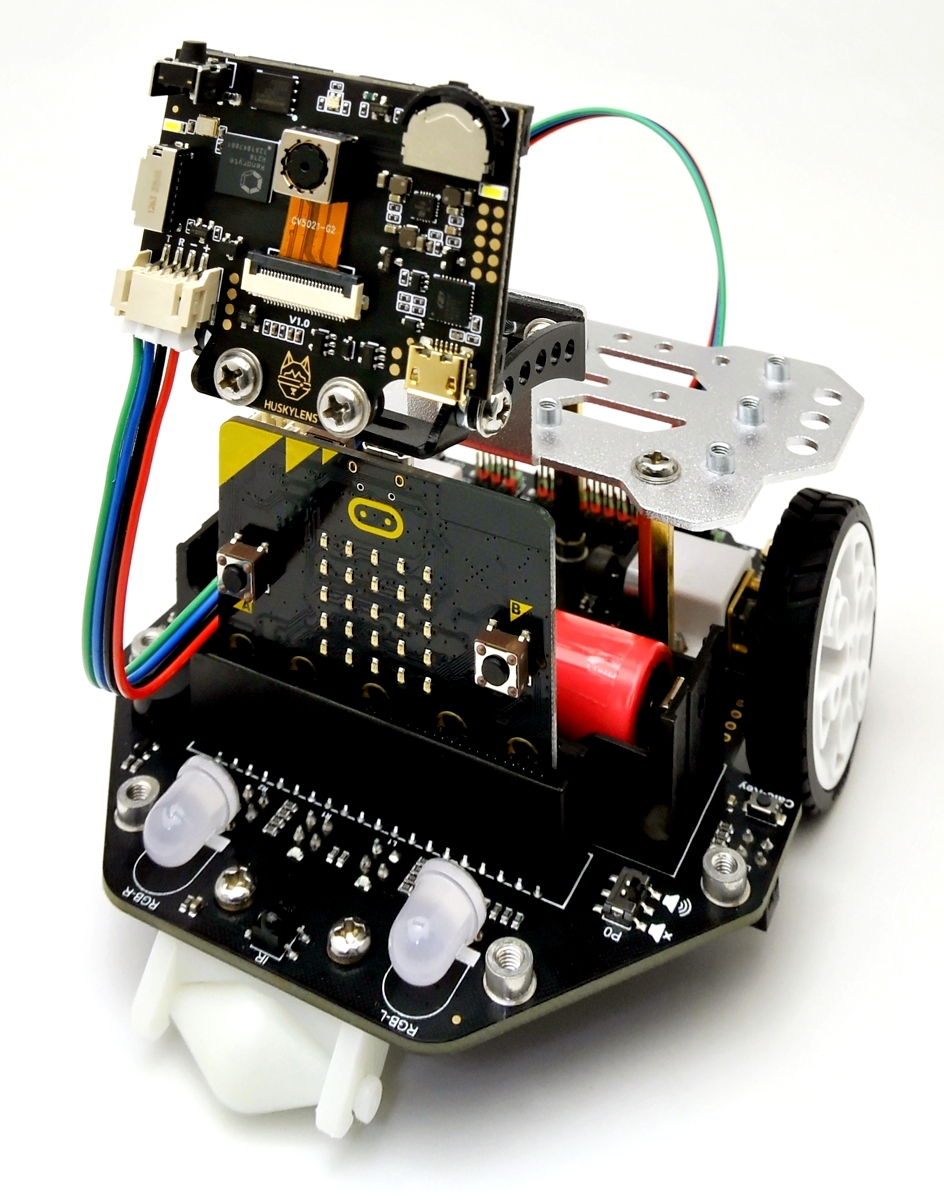
AIカーの誕生
HUSKYLENSとmicro:Maqueen Plusを組み合わせることで、AI Vision Sensorと拡張性を備えた二輪のAIカーを比較的簡単に作ることができます。もちろん動作にはプログラミングが必要ですが、HUSKYLENSに搭載された6つのAIアルゴリズムを使って、自律走行するAIカーの開発が楽しめそうです。
13-7-2.準備するもの
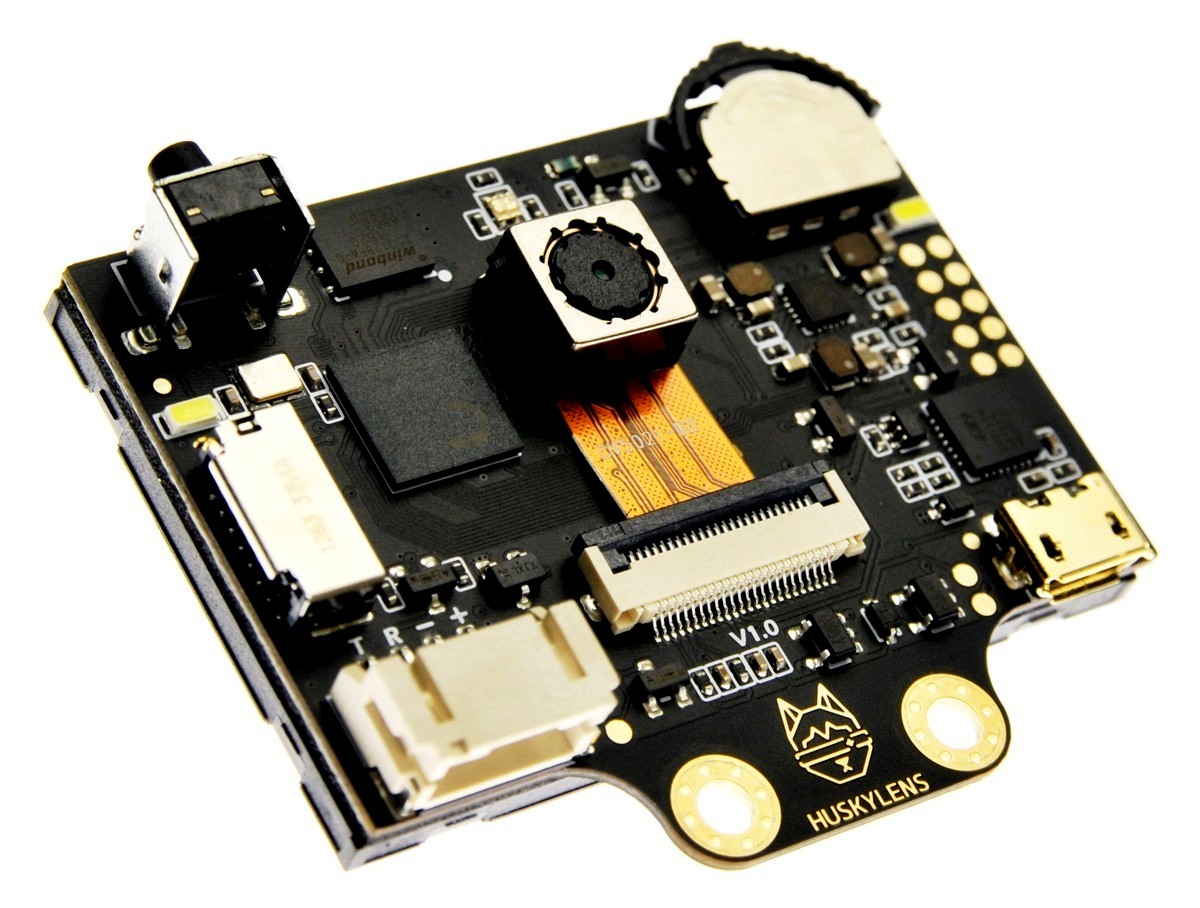
HUSKYLENSと同梱物
AIカーの目となるHUSKYLENS本体です。HUSKYLENSは「付録3-19.HUSKYLENS(AI Vision Sensor)」で詳しく紹介しています。
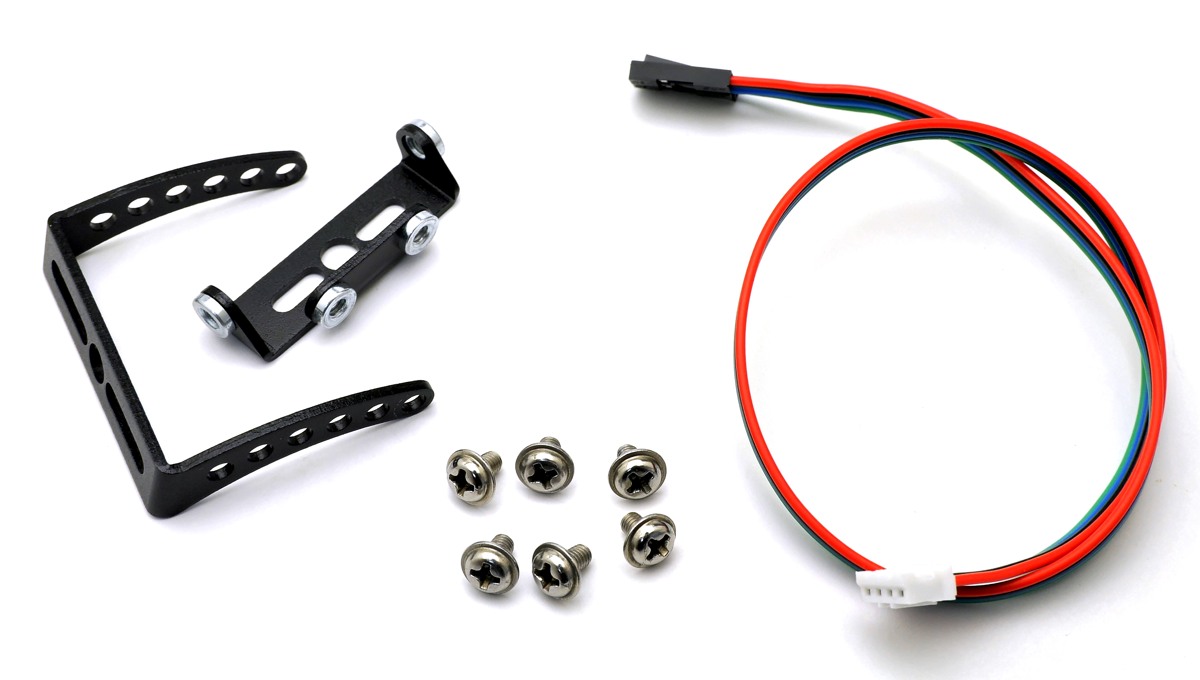
HUSKYLENSに同梱されている小型ブラケット・高さ調整用ブラケット・Gravity 4ピンセンサーケーブル・M3ネジ(6本)です。
HUSKYLENS用シリコンケース
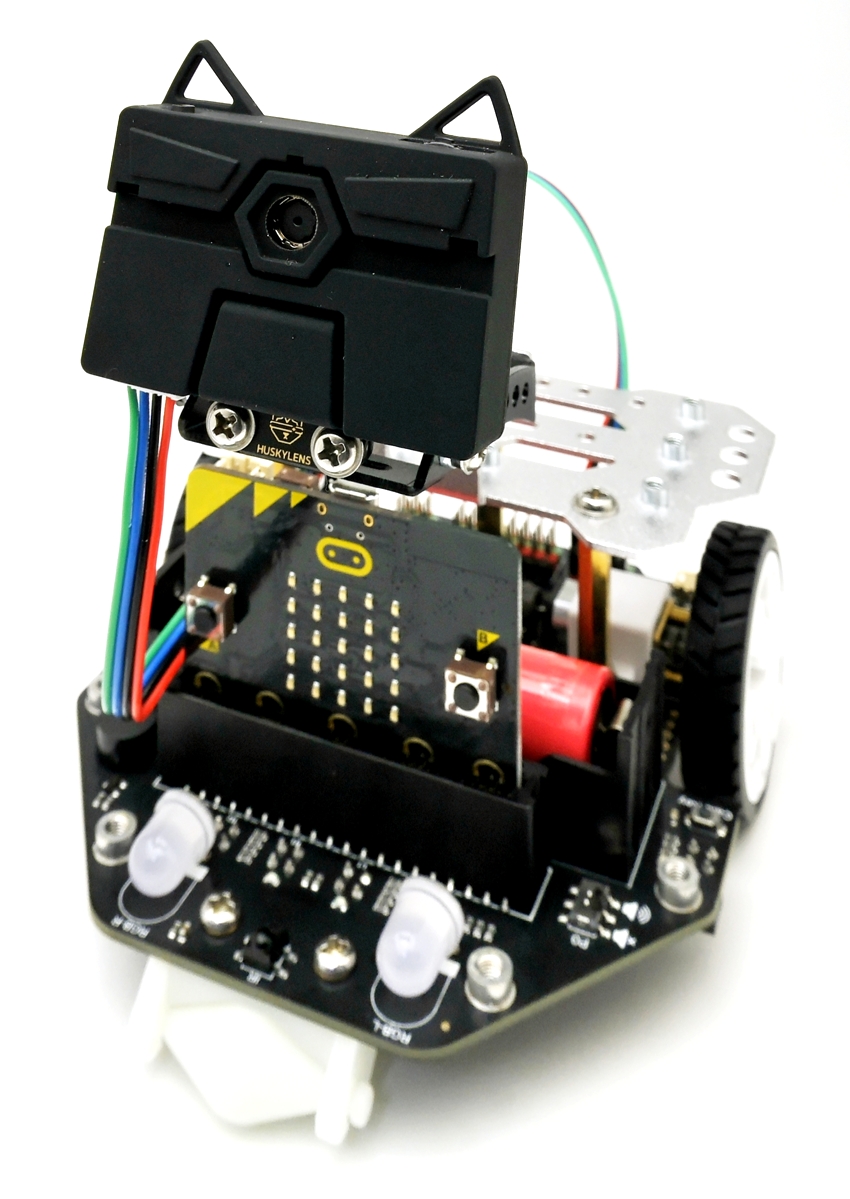
HUSKYLENSを保護するためのシリコンケースです。AIカーの走行時、転倒したり衝突による衝撃を和らげ、HUSKYLENSが破損するリスクを軽減するために用意しておいたほうがいいでしょう。三角の耳がついたカッコいいイヌ型のケースです。

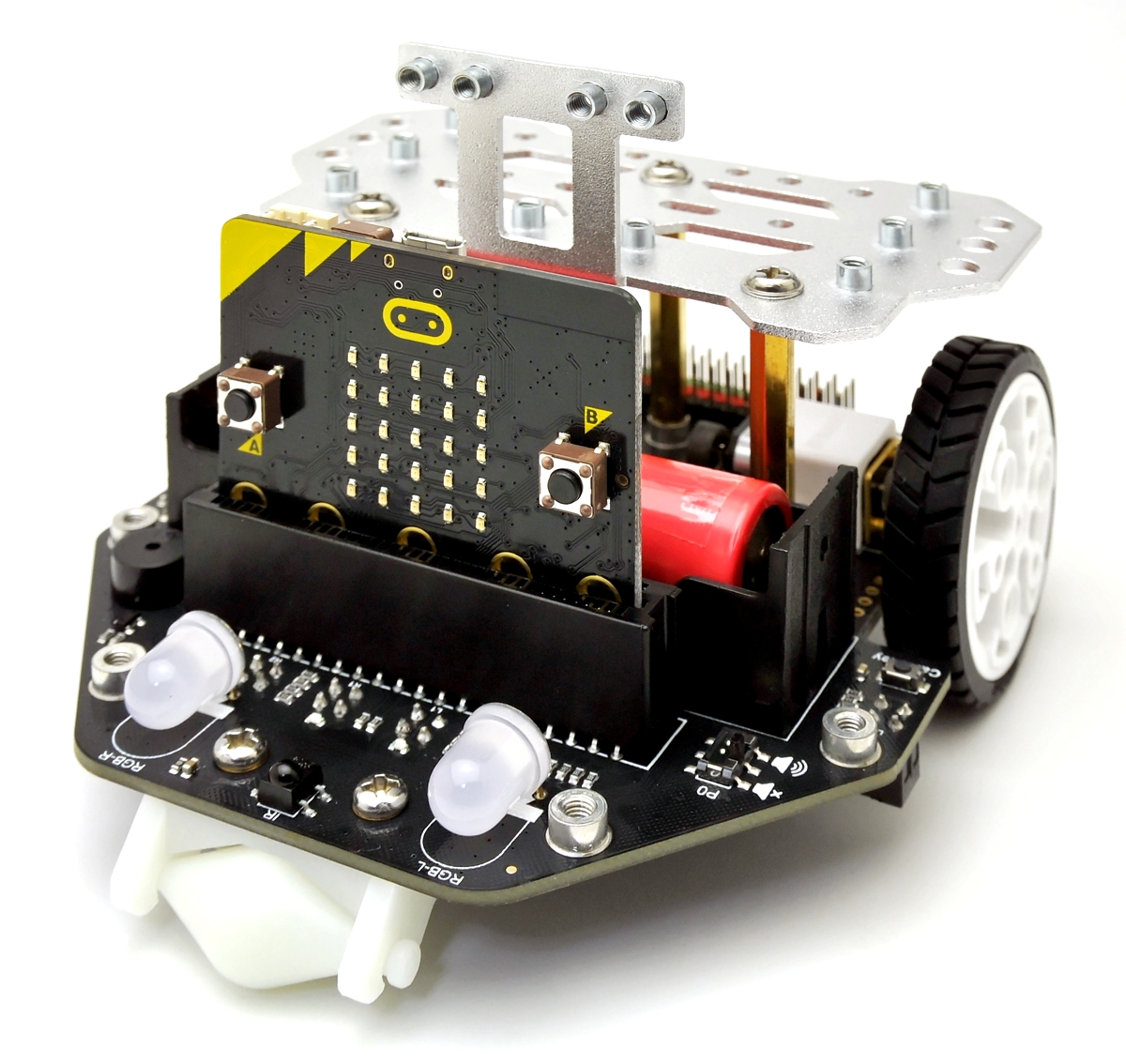
micro:Maqueen Plusとmicro:bit
micro:Maqueen Plusは、独立した二つの駆動輪を持つSTEM教育用のプログラミングカーです。micro:bitを搭載することで、駆動輪などをプログラミングで制御することができます。超音波センサーは外しておきます。
13-7-3.micro:Maqueen Plusへの取り付け手順
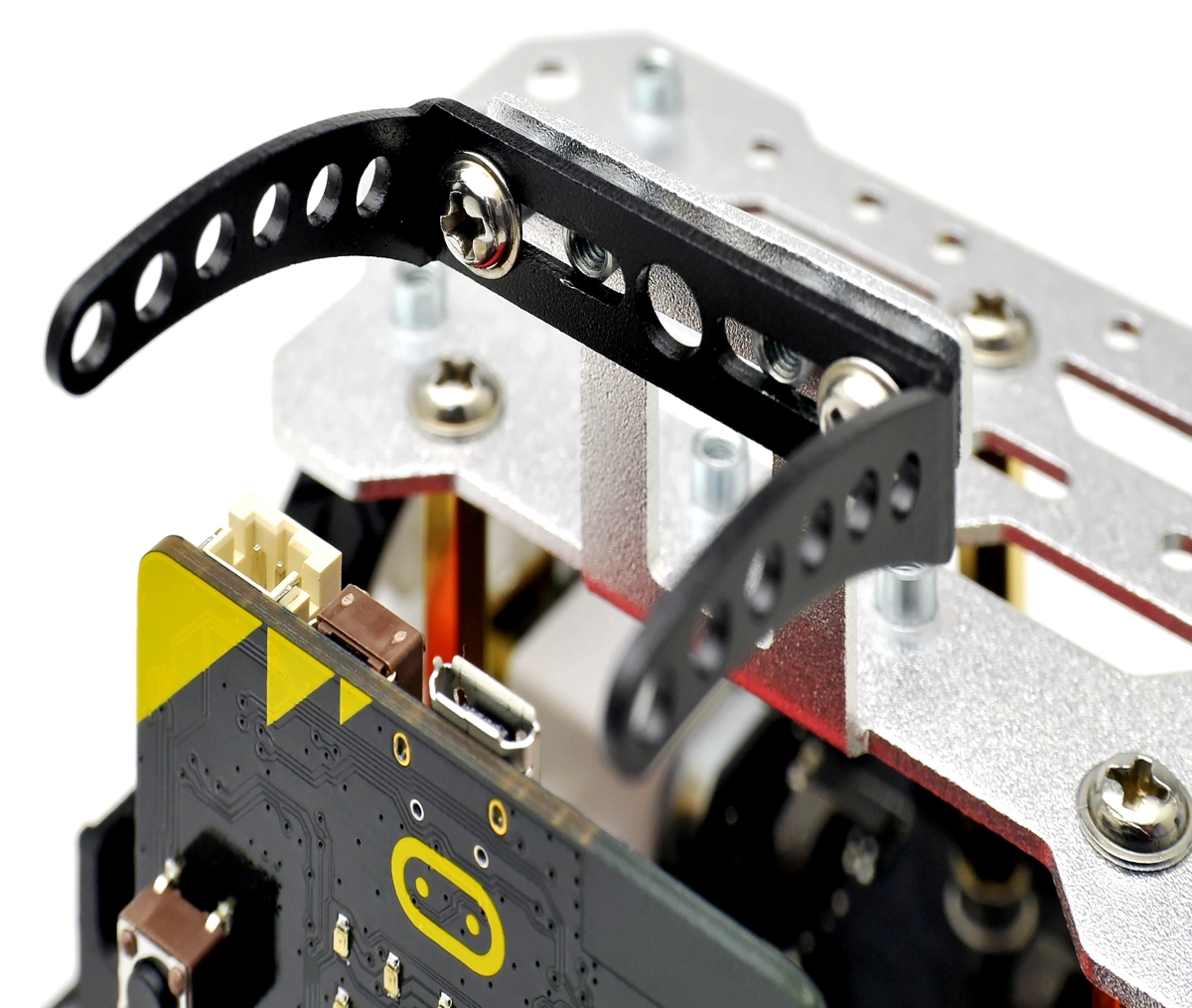
HUSKYLENSの取り付け
高さ調整用ブラケットを、micro:Maqueen Plusの金属板(拡張ブラケット)にM3ネジ(2本)を使ってネジ止めします。
ネジ(2個)を使って、小型ブラケットをHUSKYLENSに固定します。

ネジ(2個)を使って、HUSKYLENSを高さ調整用ブラケットに固定します。
HUSKYLENSの接続
HUSKYLENSに同梱されているGravity 4ピンセンサーケーブルをHUSKYLENSに接続します。
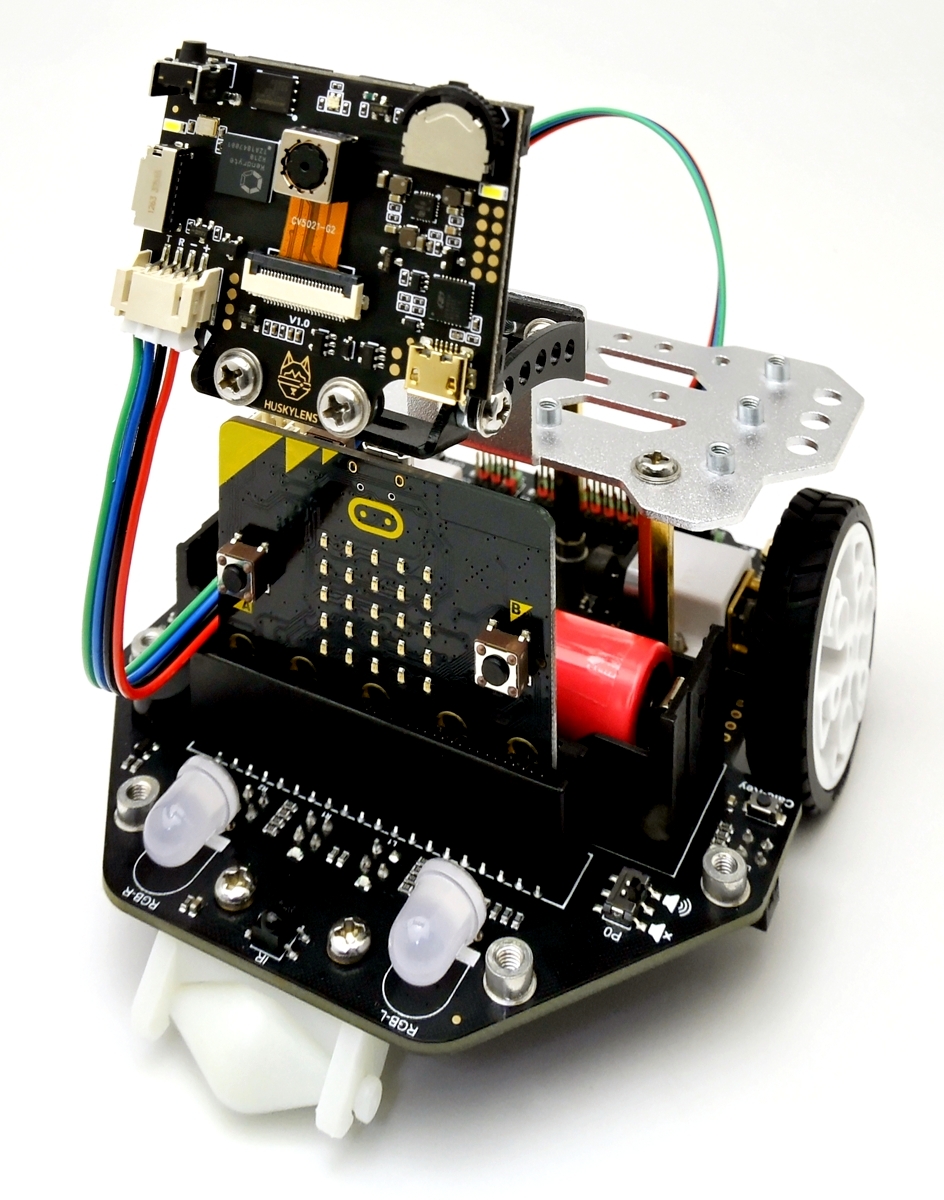
Gravity 4ピンセンサーケーブルとI2C(IIC)インタフェースの色(赤・黒・青・緑)を合わせて差し込みます。
HUSKYLENS用シリコンケースの取り付け
HUSKYLENS用シリコンケースを取り付けましょう。
おすすめ品













