メカナムホイールロボットの制御

各ホイールの回転方向を制御することで、前進・後進・左右への回転だけでなく、車体の向きを固定したまま左右へ移動したり、斜め方向へ進むことができるメカナムホイールを紹介します。
メカナムホイールとは
メカナムホイールの特徴
メカナムホイールは、ホイールの車軸に対して、45度の角度で樽形の小型ローラーが配置された特殊なホイールです。図9-3-1は、Nexus Robot製のスチールメカナムホイール(48mm)です。スチールのプレートに8個の樹脂(TPR)ローラーが取り付けられています。

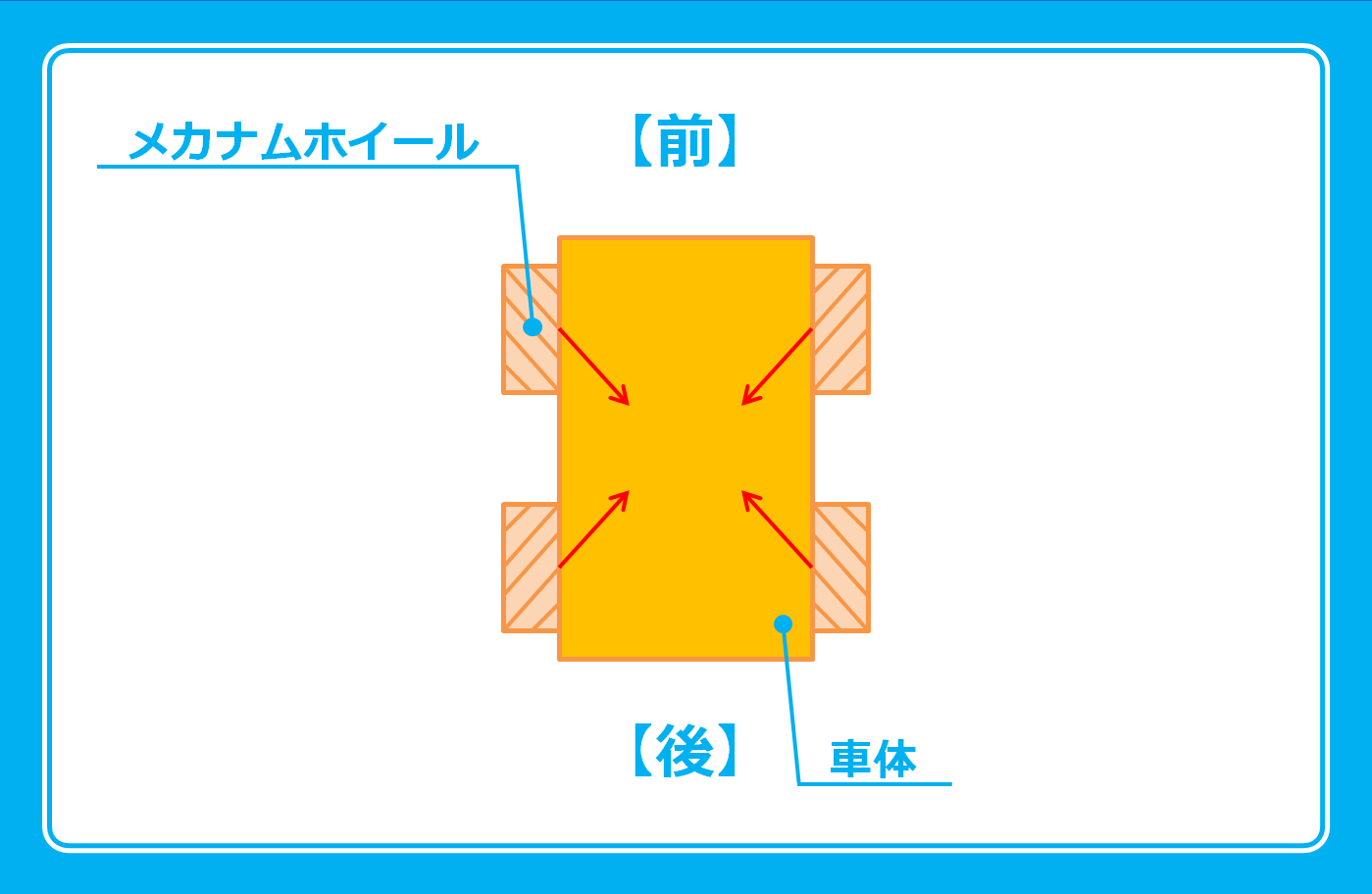
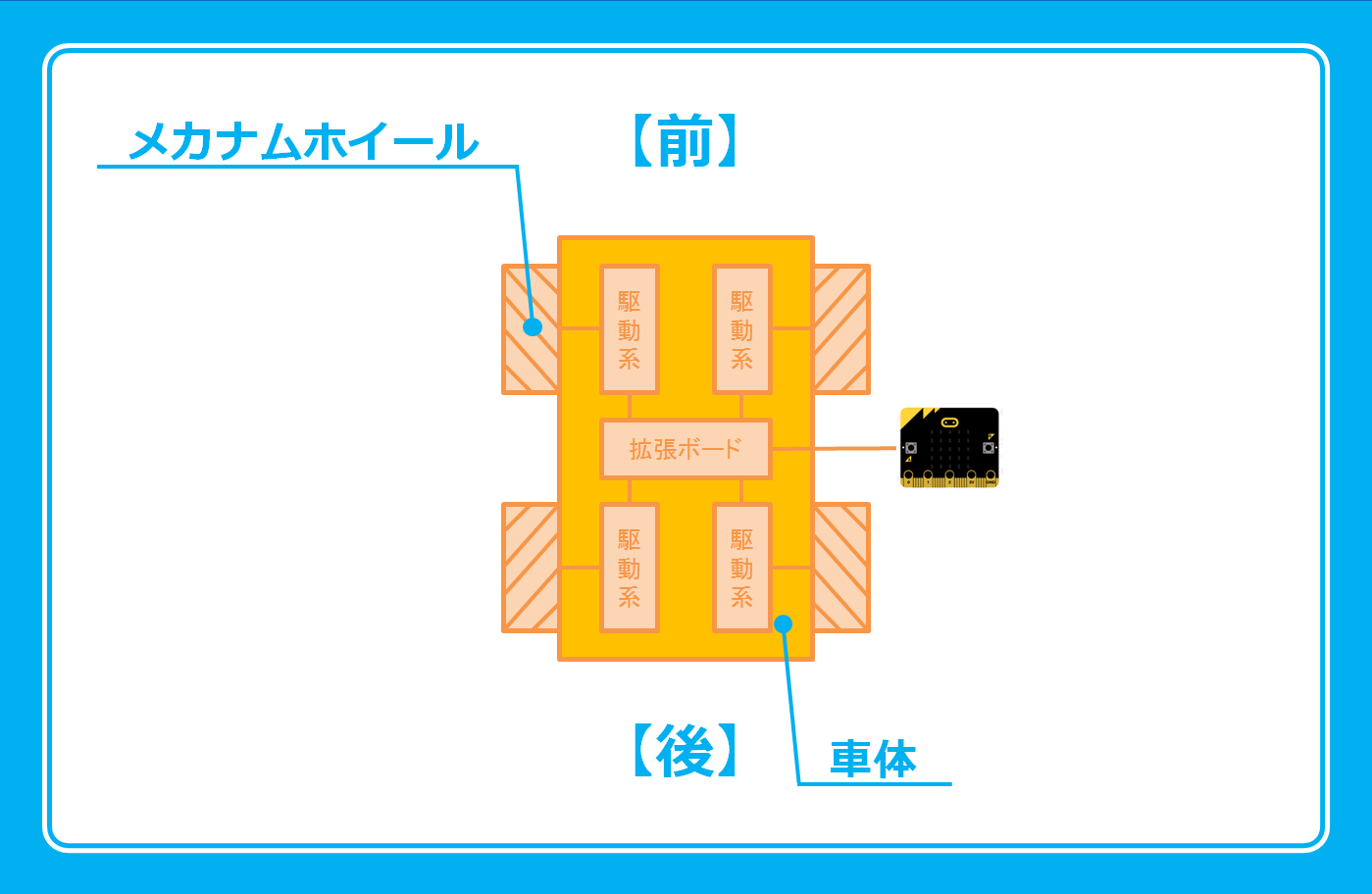
ロボット(台車型)にメカナムホイールを搭載する場合、一般的な自動車と同じように車体の四隅にホイール(合計4個)を配置します。4個のホイールは、モーターなどの独立した駆動系にそれぞれ接続され、必ず四輪駆動となります。
各ホイールの回転方向を組み合わせることで、前進・後進・左右への回転だけでなく、車体の向きを固定したまま左右へ移動したり、斜め方向へ進むことができます。メカナムホイールを搭載することで、まさに全方向へ移動可能な四輪駆動ロボットとなります。
購入時の注意点
購入時(または取り付け時)の注意点として、ローラー軸の向きがあります。メカナムホイールのローラー軸には、向きの異なる2種類があり、それぞれ2個ずつ、合計4個が1つのセットとなります。購入時には、4個セットで販売されているものがおすすめです。

Nexus Robotの国内正規代理店であるロボットショップ(ヴイストン株式会社)にて「48mmスチールメカナムホイール4個セット(14209)」が販売されています。

メカナムホイールの取り付け
メカナムホイールの取り付けは、車体を上から見て、各ホイールのローラー軸が車体の中心へ向くように取り付けます。
なお、モーターなどの駆動系への取り付けには、取付軸のサイズ(径)に合わせた専用ハブが必要です。各ホイールに一つずつ合計4個必要になります。メカナムホイールの購入時にお忘れなく。

全方向への移動が可能
メカナムホイールは、各ホイールの回転方向を制御することで、ステアリングなどの機構を使わずに全方向への移動が可能です。ただし、メカナムホイールの性能を発揮するには、すべてのホイールが床面と接地する必要があるため、原則として平地での走行となります。(多少の不整地なら、サスペンションを搭載することで安定した走行ができるかもしれません。)
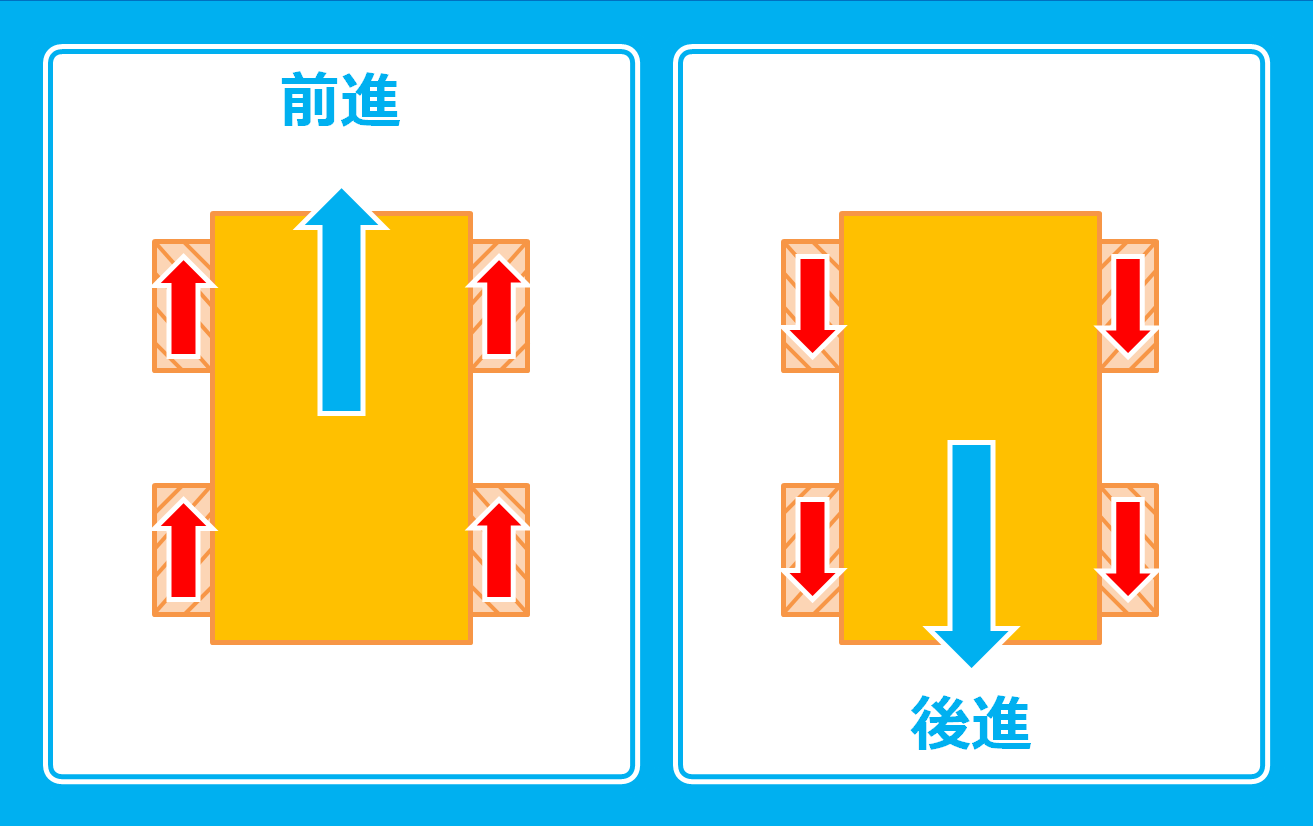
では、各ホイールの回転方向と車体の移動方向の関係について見てみましょう。まず、前進と後進です。ホイールの回転方向をすべて同じにすることで、車体が同方向へ移動します。
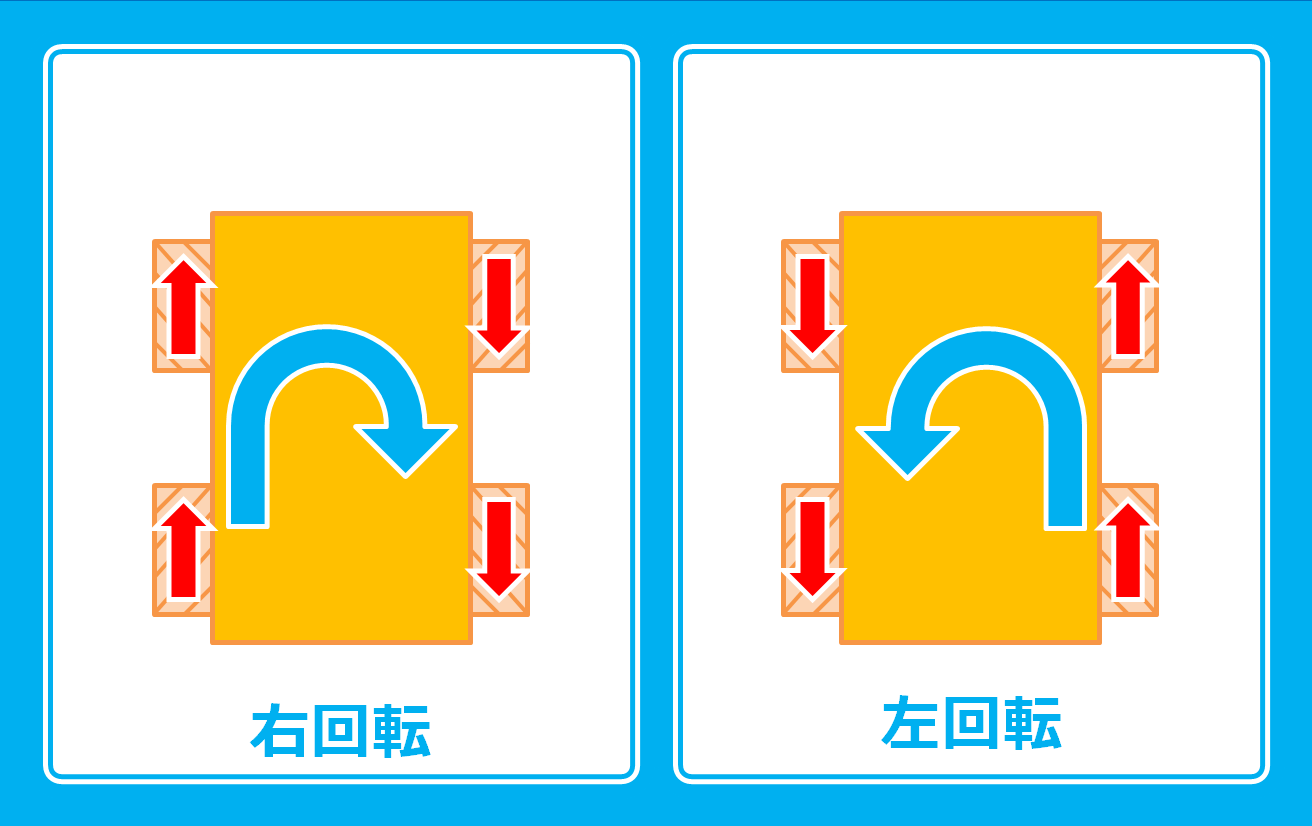
次に回転です。ホイールの回転方向を左右別にすることで、車体が右回転(または左回転)します。
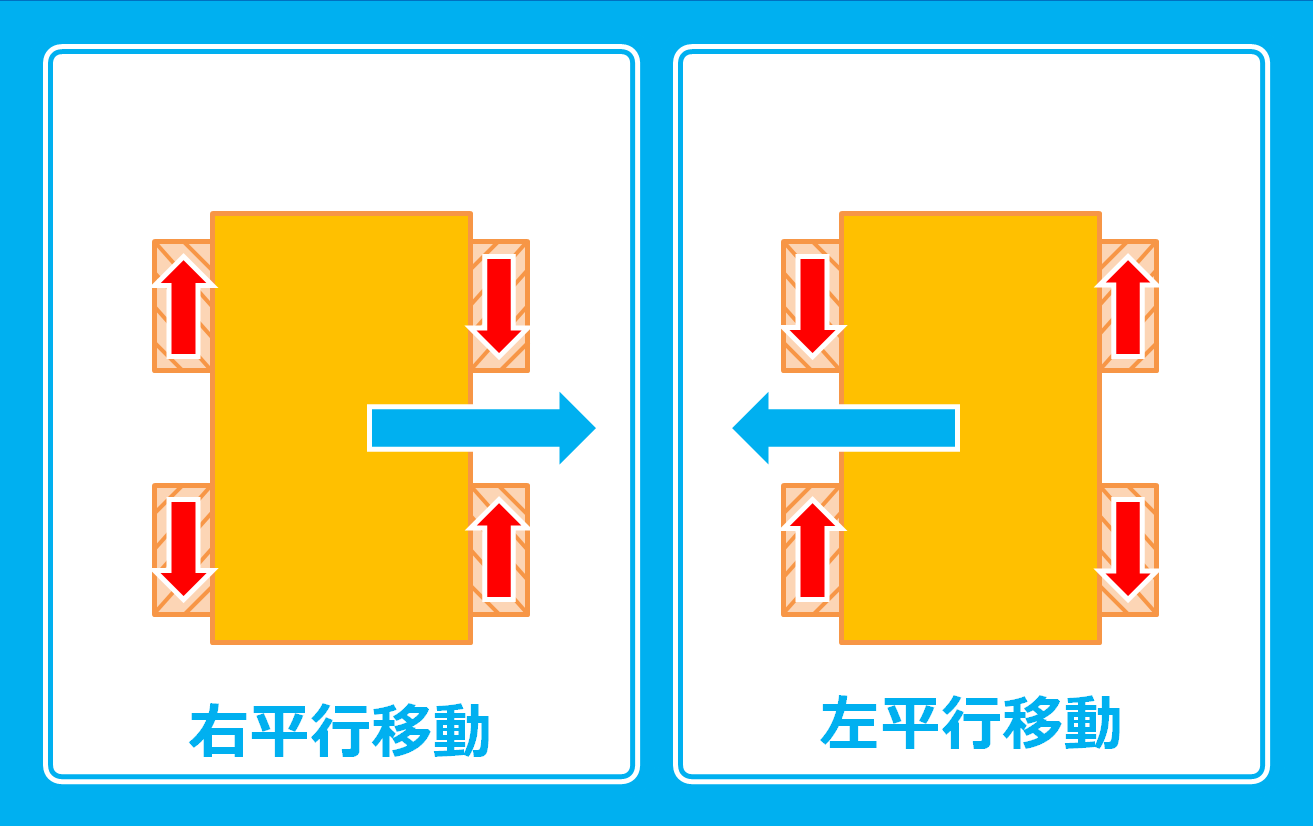
車体の向きを固定したまま、左右へ平行移動することができます。
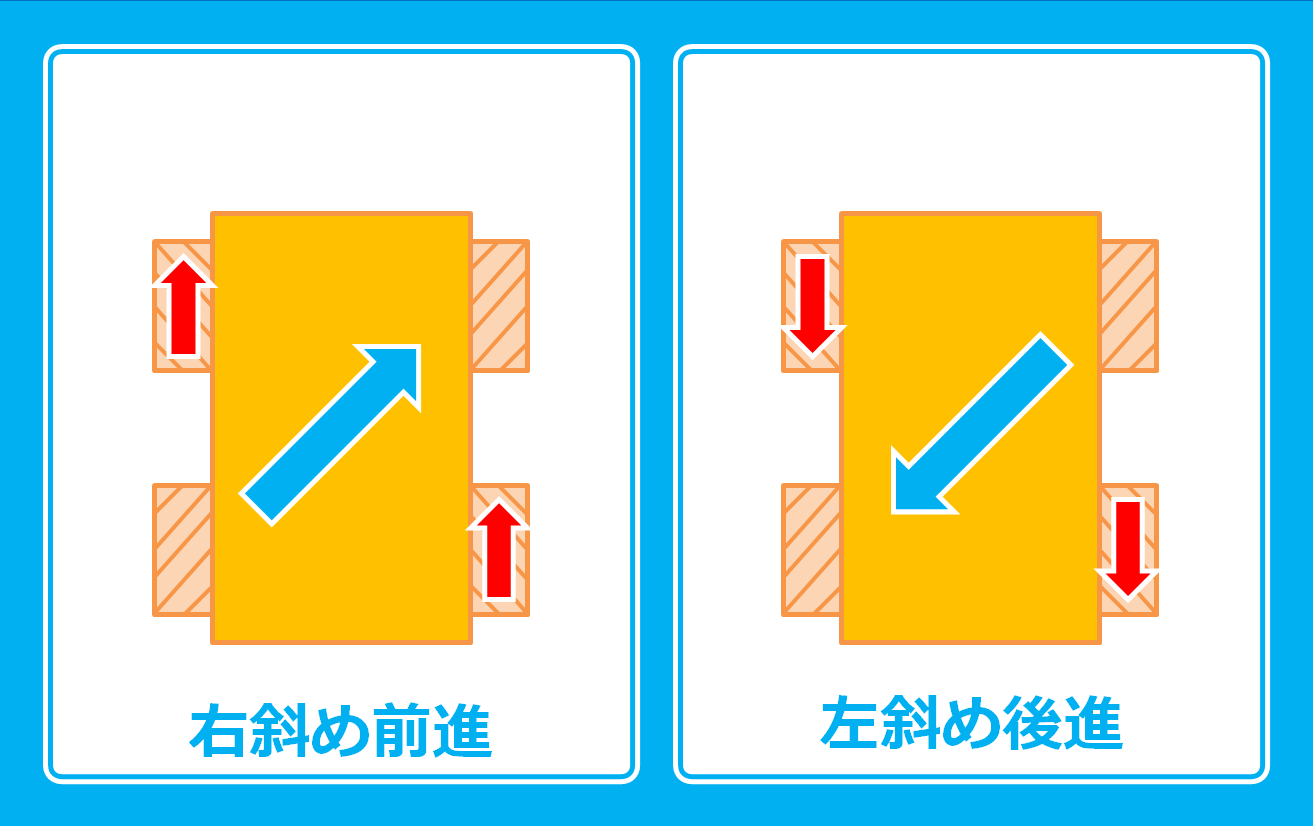
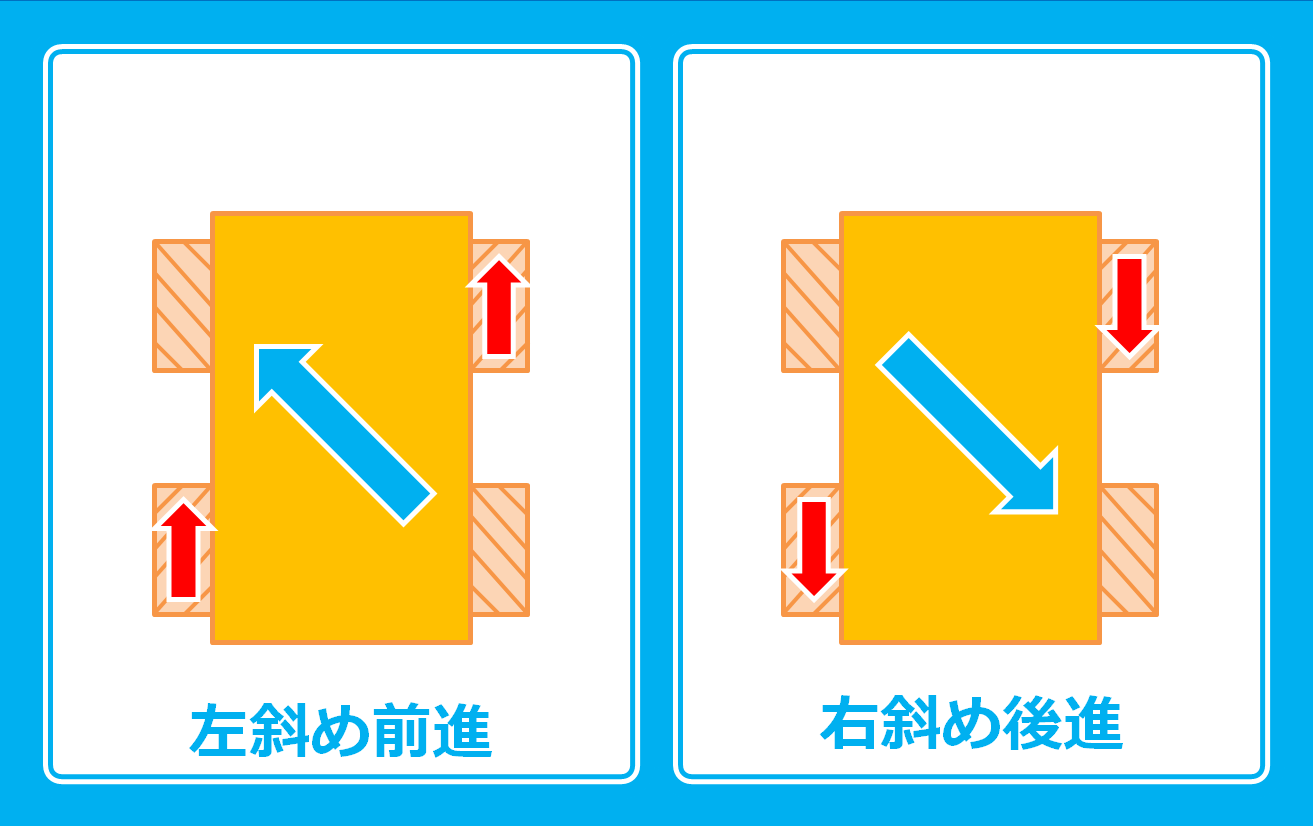
同じく、車体の向きを固定したまま、斜め方向へ前進(または後進)することができます。
いかがでしょうか。四輪の回転方向を制御することで、全方向への移動が可能になるのは驚きですね。
micro:bitで制御するには
micro:bitで制御するには
micro:bitを使って、メカナムホイールを搭載した四輪駆動ロボットを動かすには、各ホイールが接続されたモーターなどの駆動系を別々に制御する拡張ボードが必要です。つまり、4個のモーターが接続できるインタフェースを搭載した拡張ボードということになります。
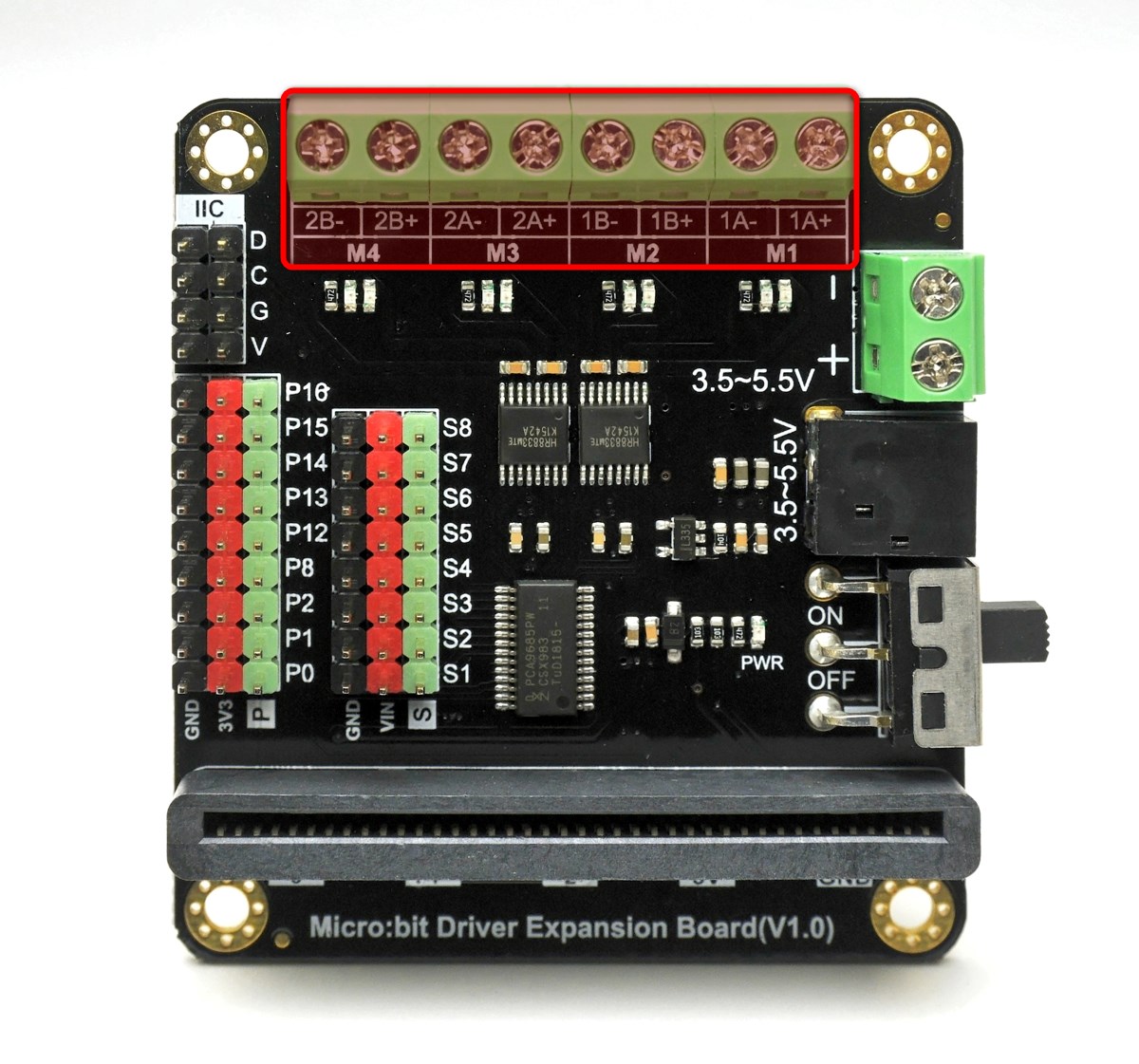
これにぴったりの拡張ボードが、DFROBOTの「Micro:bit Driver Expansion Board」です。M1~M4までのモーター端子4個を備えています。
この拡張ボードは「付録3-10.Micro:bit Driver Expansion Board」で詳しく紹介しています。










