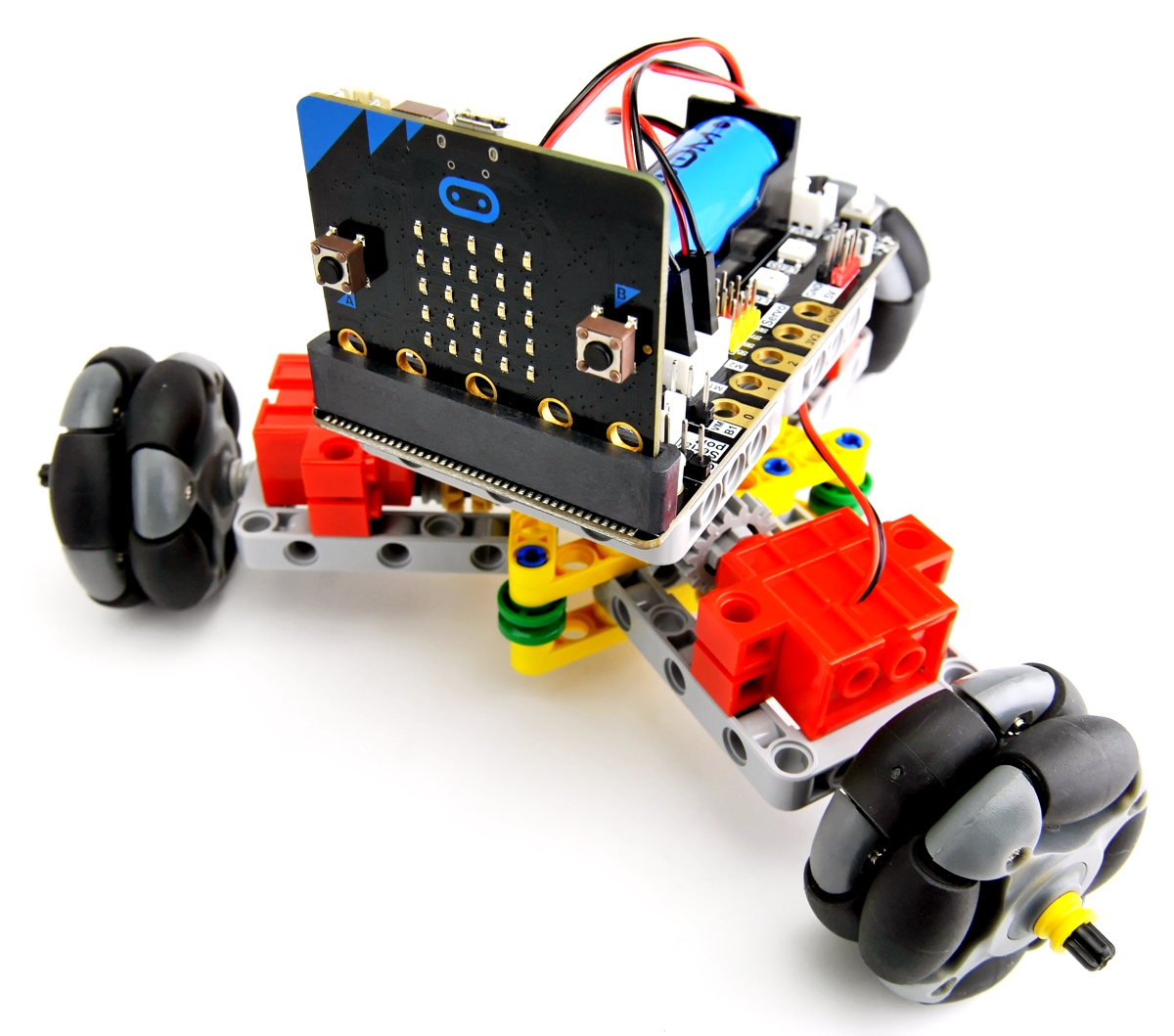
LEGO三輪オムニホイールロボット
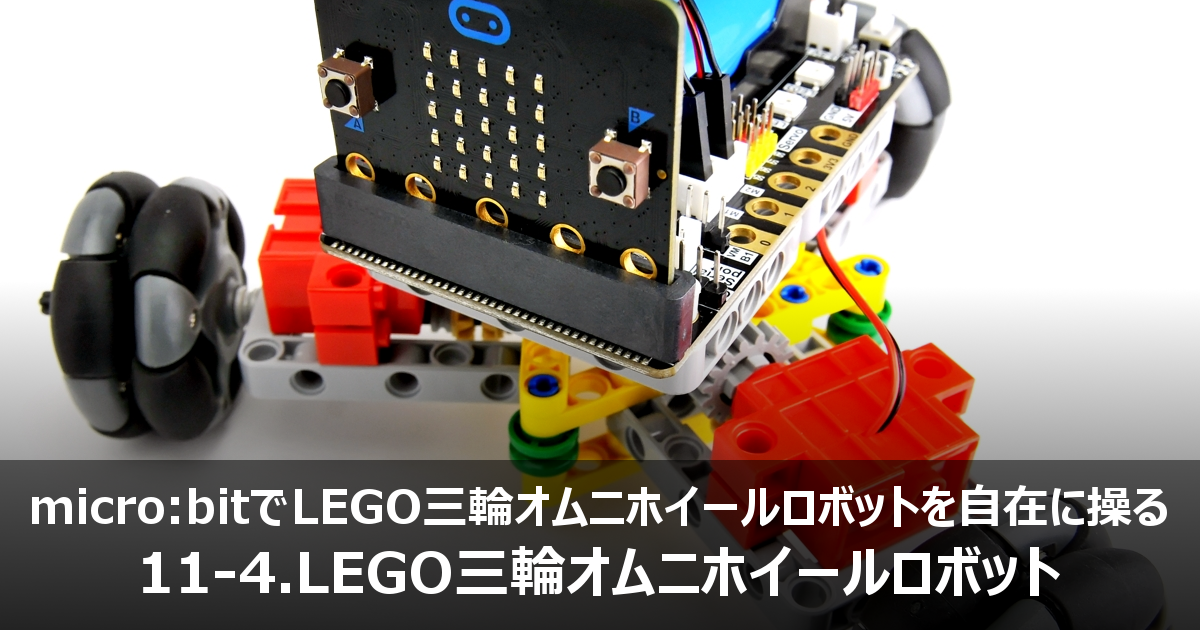
micro:bitで制御するLEGOの第二弾は、あらゆる方向へ移動が可能な「LEGO三輪オムニホイールロボット」です。本記事では、LEGO三輪オムニホイールロボットの構造と組み立て方法を紹介します。
LEGO三輪オムニホイールロボットの構造
LEGOテクニック(Technic)ブロック
LEGO三輪オムニホイールロボットは、LEGOブロックを使って組み立てます。一般的な基本ブロックとは異なり、よりメカニカルなモデルを作ることができる「テクニック(Technic)」と呼ばれるブロックを主に使用します。ブロックの総数は、およそ80個です。
以下の動画は、二つのmicro:bitを使って、LEGO三輪オムニホイールロボットをラジコン化したものです。本体の向きを保ったまま、あらゆる方向へ移動したり、その場で回転するようすが見られます。
programmable building block motor(Geekservo)
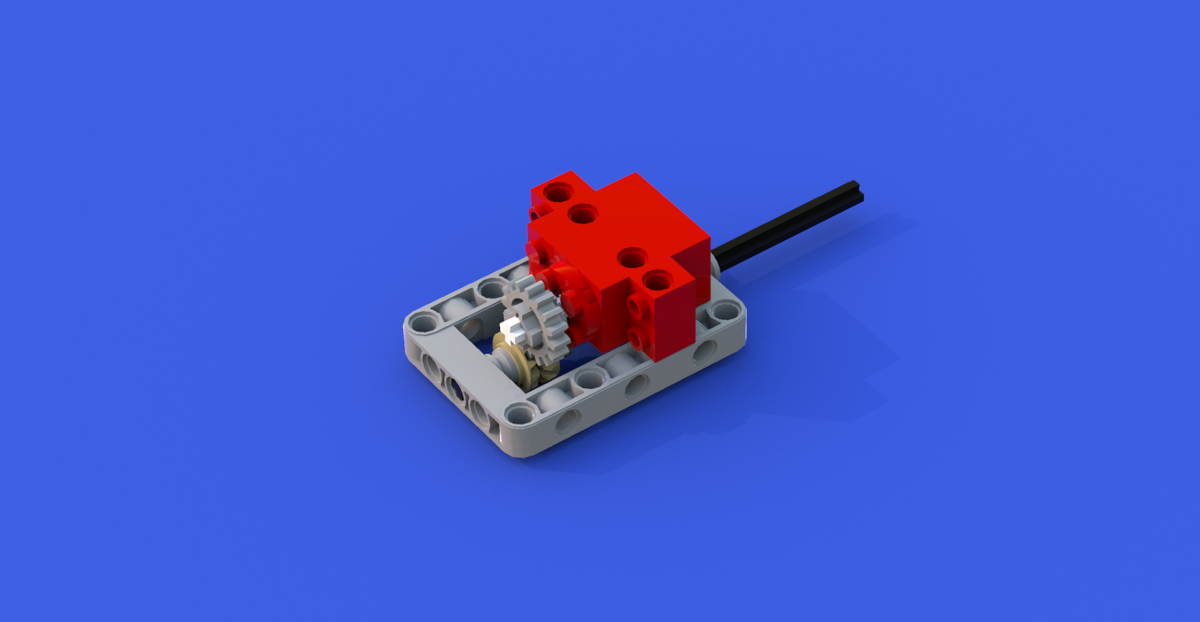
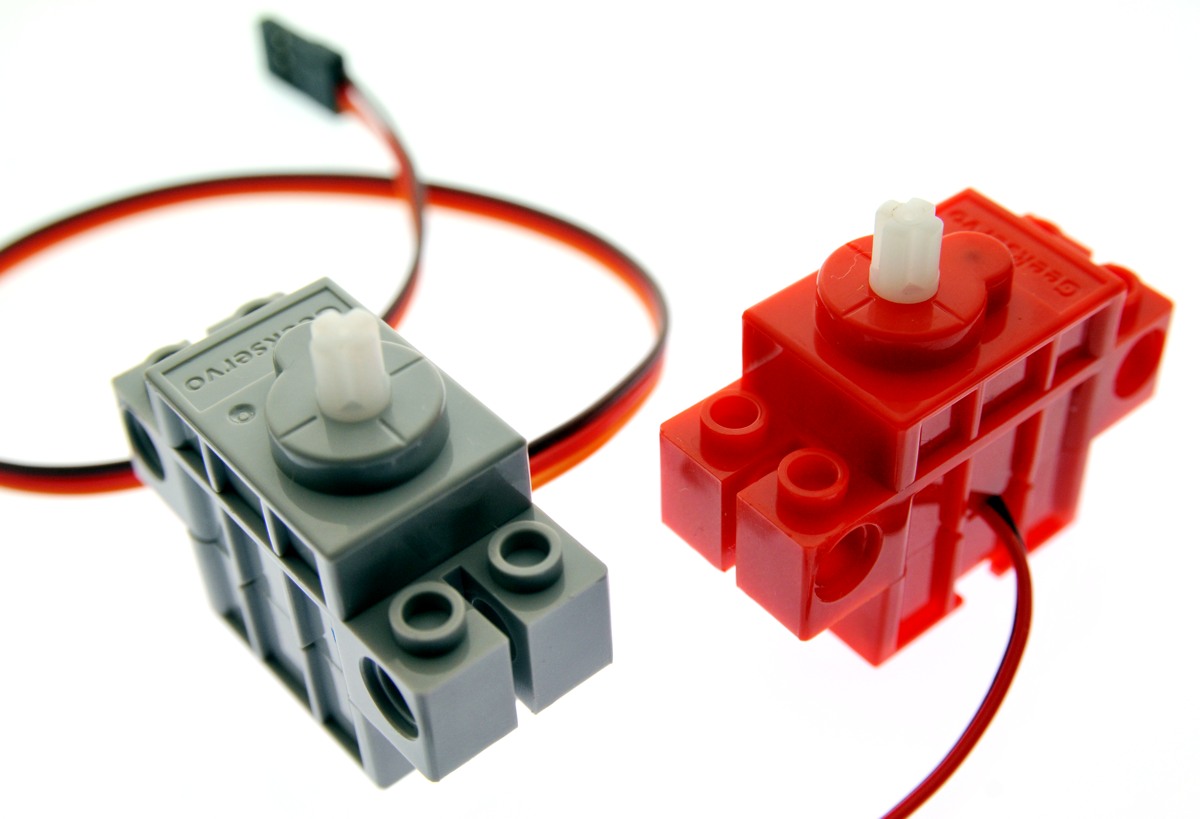
LEGO三輪オムニホイールロボットを走行させるために、LEGOに接続可能なprogrammable building block servo/motor(Geekservo)のうち、赤(Red motor)を使います。サーボモーターのような形状ですが、一般的なDCモーターと同じく2線式で、電圧を加えることで、出力軸が回転し続けるモーターです。加える電圧の向きによって、出力軸の回転方向が異なります。なお、Geekservoは「11-2.Super:bitに接続できる2種類のモーター」で詳しく紹介しています。
オムニホイール
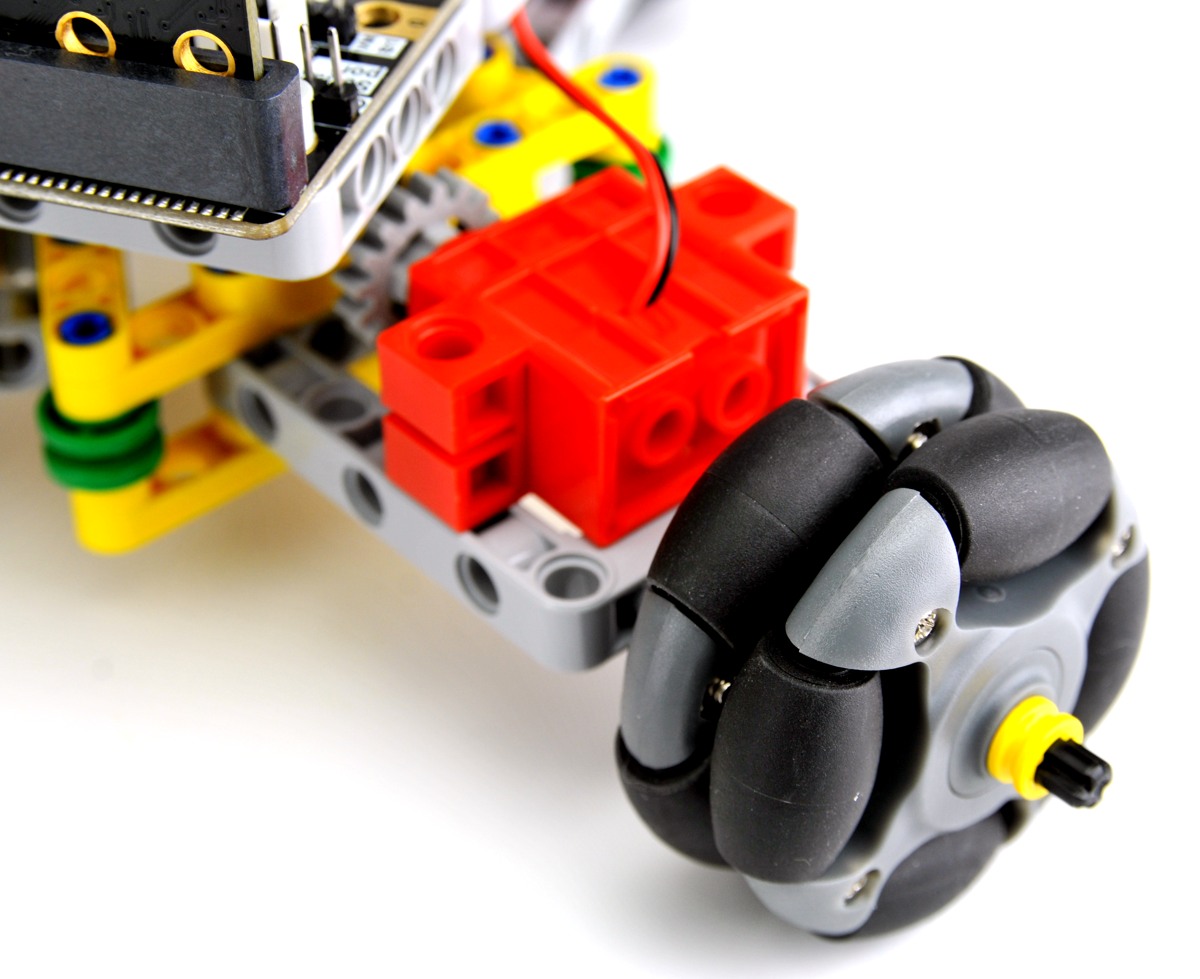
駆動輪に使うのはオムニホイールという、特殊な形状をしたタイヤです。オムニホイールは、円周方向に対して、垂直に回転する小さなディスク(下図では、黒い樽型のパーツ)が取り付けられています。このような構造によって、通常のタイヤのように回転することで円周方向へ移動したり、横からの力に対してディスクが回転することで、横方向へ移動することができます。
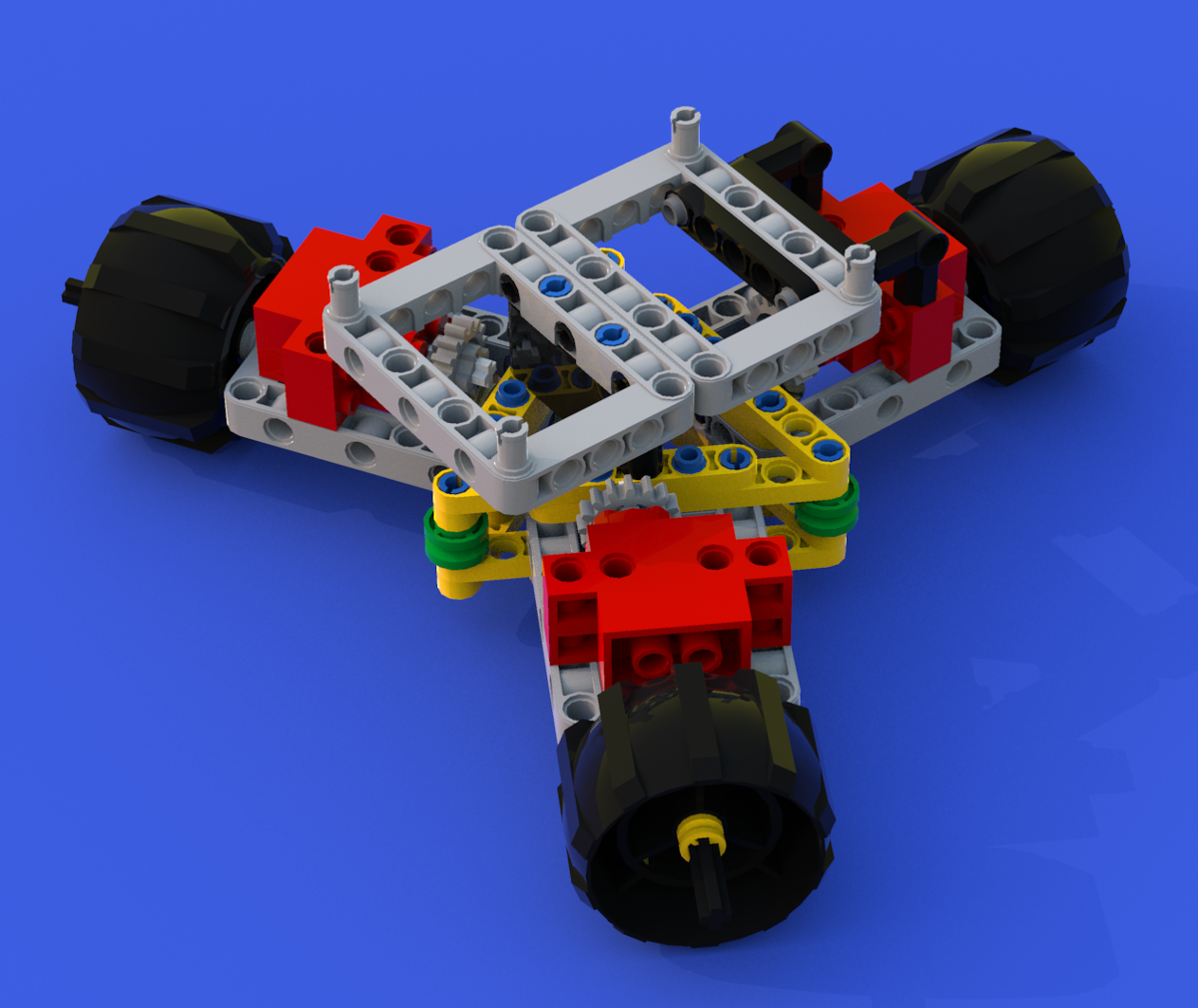
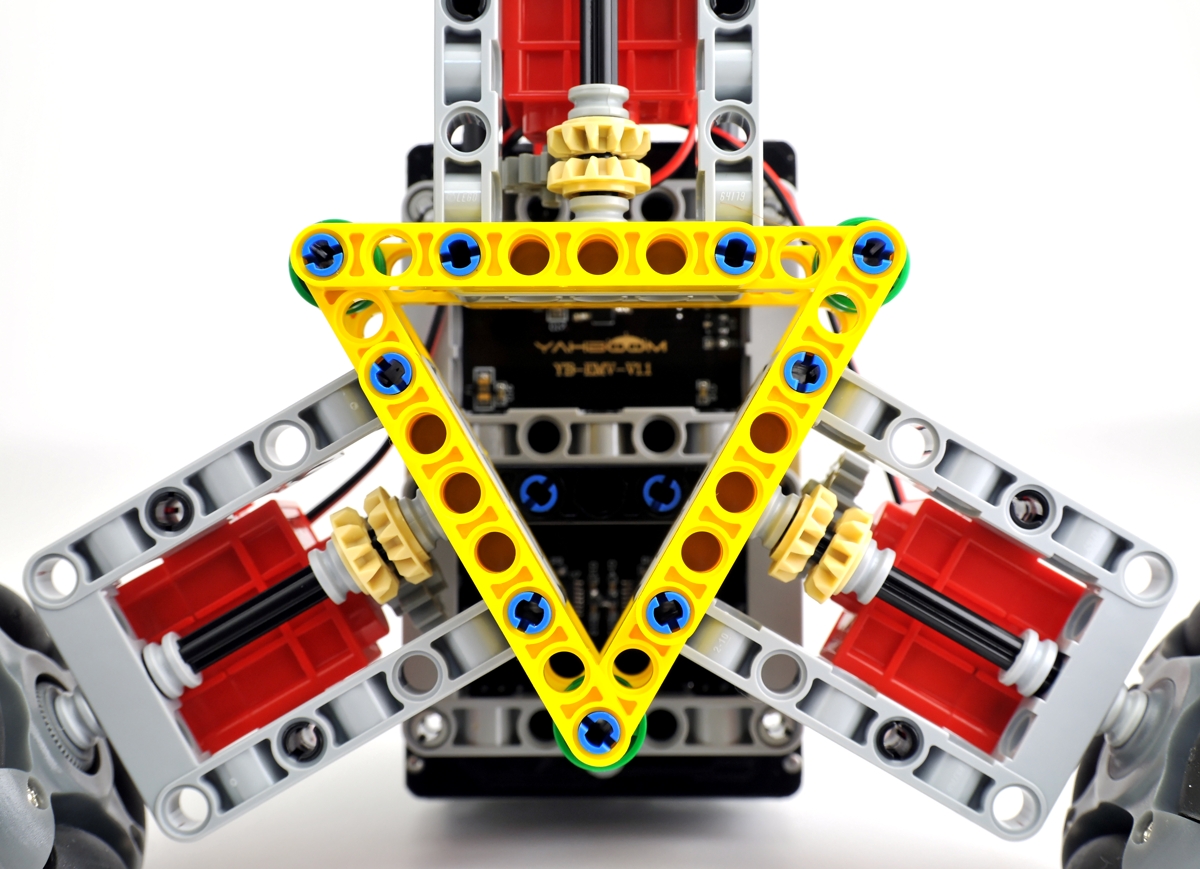
LEGO三輪オムニホイールロボットは、3つのオムニホイールを駆動輪として使い、あらゆる方向へ自在に移動する三輪ロボットです。本体の中心から三方向へ120度間隔でアームが延び、その先にオムニホイールが取り付けられています。3輪のオムニホイールが、ちょうど正三角形の頂点に配置される構造となります。
本記事で使用するオムニホイールは、LEGOに接続可能なアダプターが付属したもので、十字軸用の穴があります。
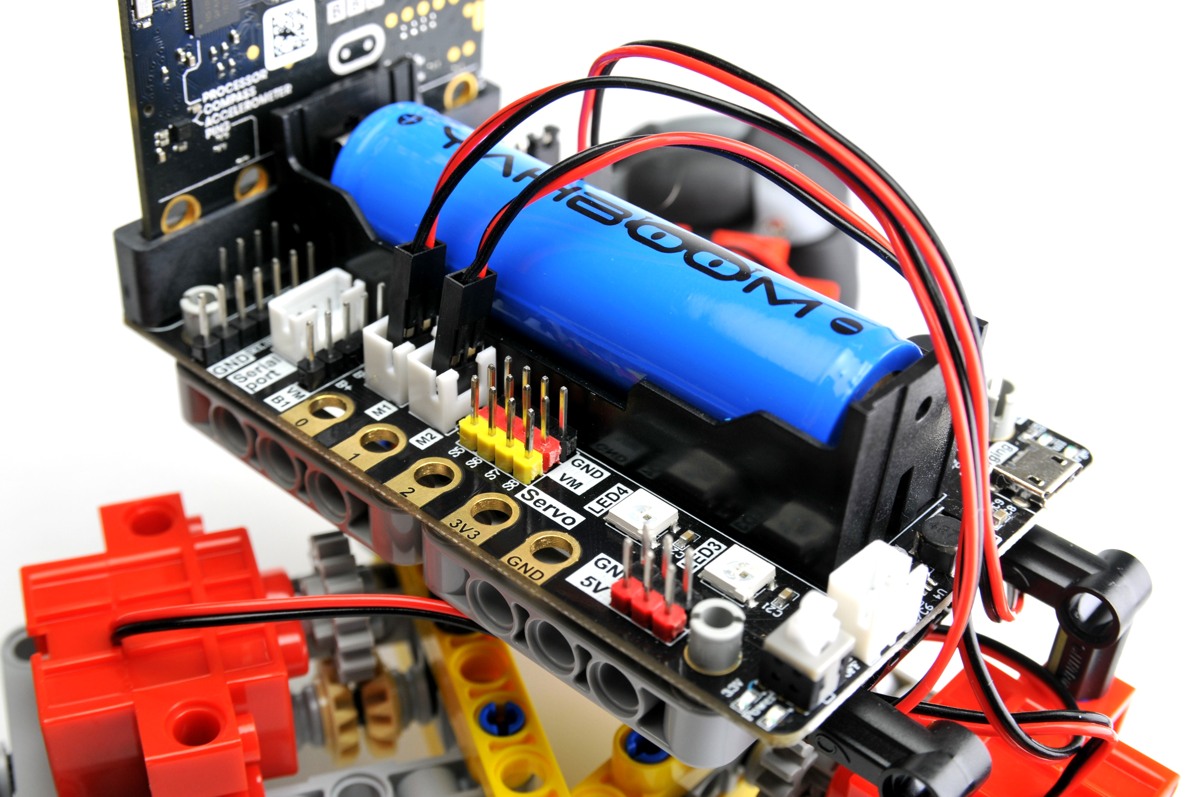
拡張ボード(モーターの制御)
赤(Red motor)の駆動は、micro:bitの拡張ボードである「Super:bit expansion board」で行います。Super:bit expansion boardは、LEGOと接続可能な拡張ボードで、LEGO三輪オムニホイールロボットの本体上部に取り付けています。なお、Super:bit expansion boardは「付録3-14.Super:bit expansion board」で詳しく紹介しています。
プログラミング
3つの赤(Red motor)の回転速度と回転方向(正転・逆転)を、micro:bitのプログラムで制御することによって、LEGO三輪オムニホイールロボットをあらゆる方向へ移動させることができます。また、別のmicro:bitを用意すると、無線機能によってラジコン化することができます。
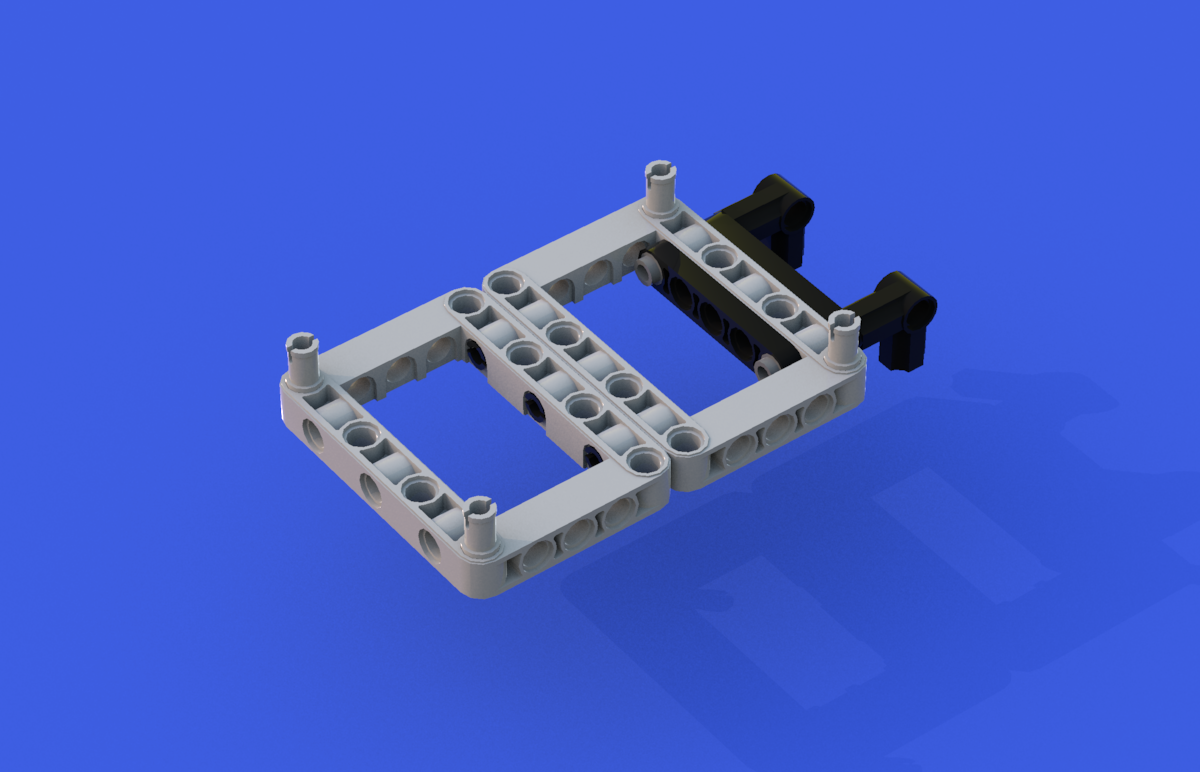
LEGO三輪オムニホイールロボットの組み立て
LEGO三輪オムニホイールロボットは、3つのアーム部(駆動輪)・拡張ボード固定部・本体の順番で組み立てます。必要なパーツと組み立て手順は「11-4-1.LEGO三輪オムニホイールロボットの組み立て」で詳しく解説しています。