micro:bitを組み込む
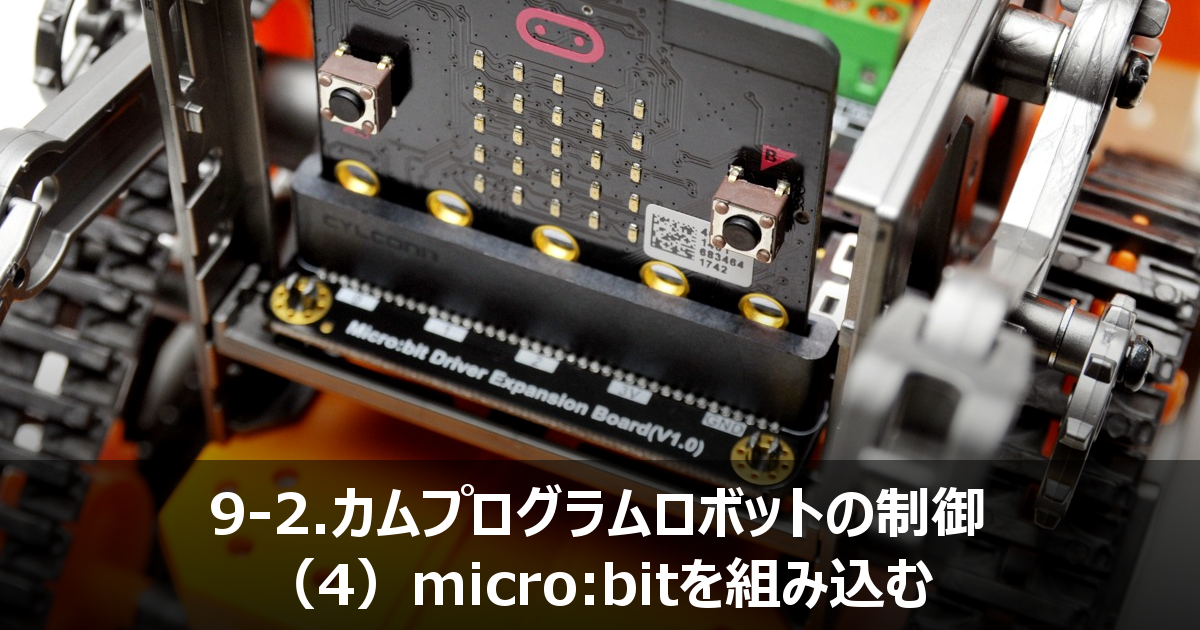
micro:bitを使って、タミヤのカムプログラムロボット(通称カムロボ)を制御します。この記事では、カムロボにmicro:bitを取り付ける手順と配線について解説します。
カムプログラムロボットの制御(目次)
- 準備するもの
- 組み立てる前に
- カムロボを組み立てる
- micro:bitを組み込む・・・いま読んでいる記事
- カムロボを制御する(プログラミング)
micro:bitを組み込む
まず、スイッチを取り付けて、スイッチと電池ボックスの間を配線します。
スイッチの取り付け
カムロボから、パーツB5とルーフ(B7)を取り外します。
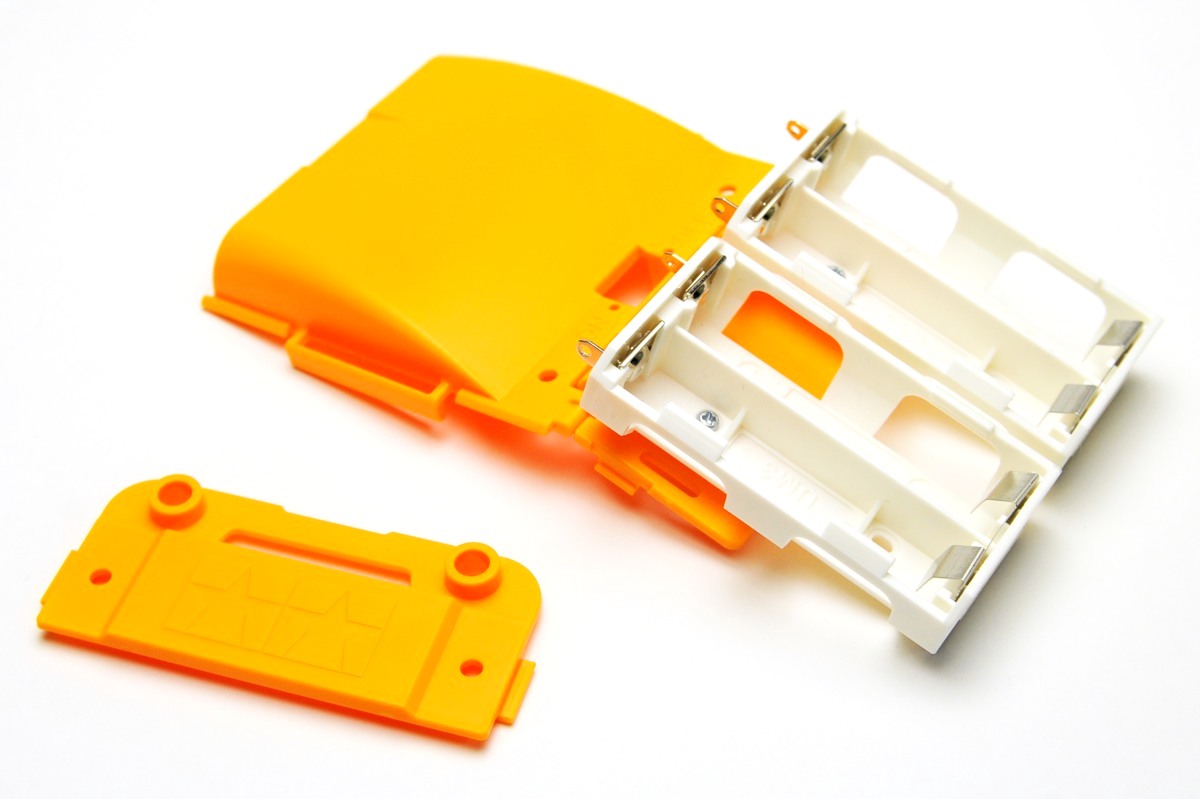
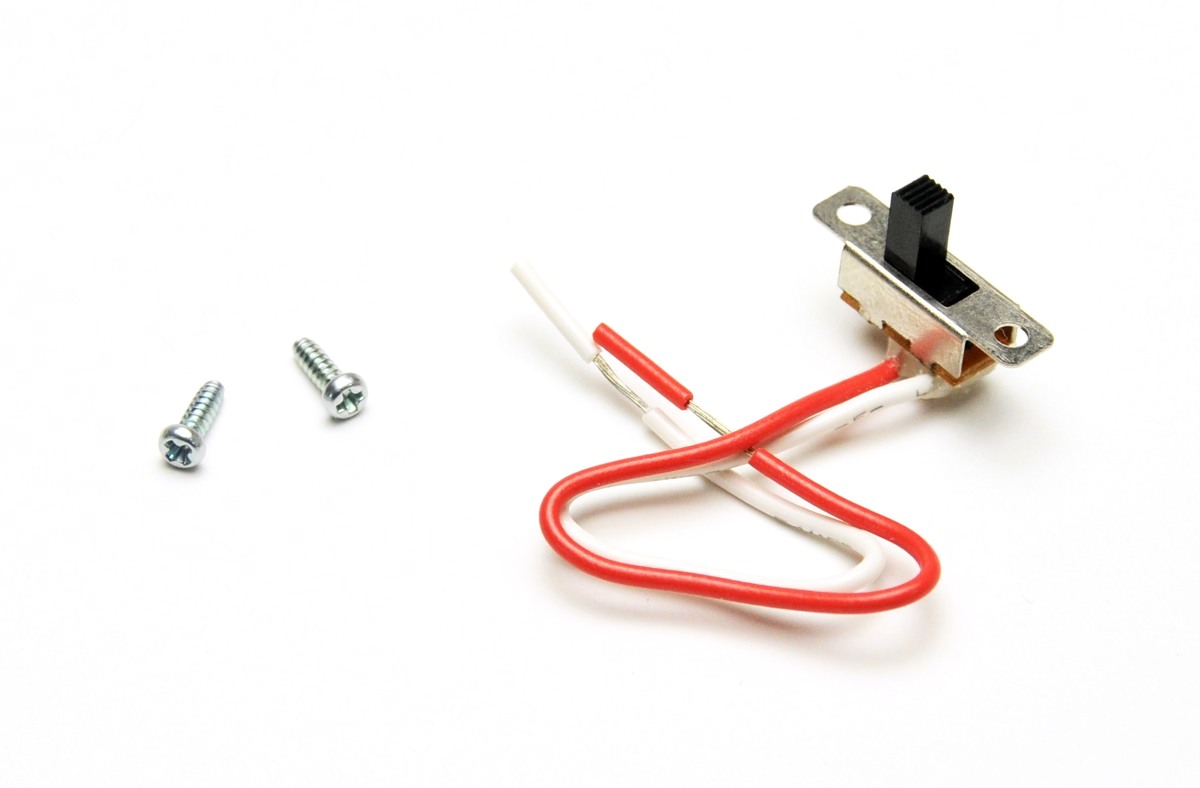
スイッチと2×6mmタッピングビスを用意します。タッピングビスの大きさは、組立説明書の【13】を参考にします。
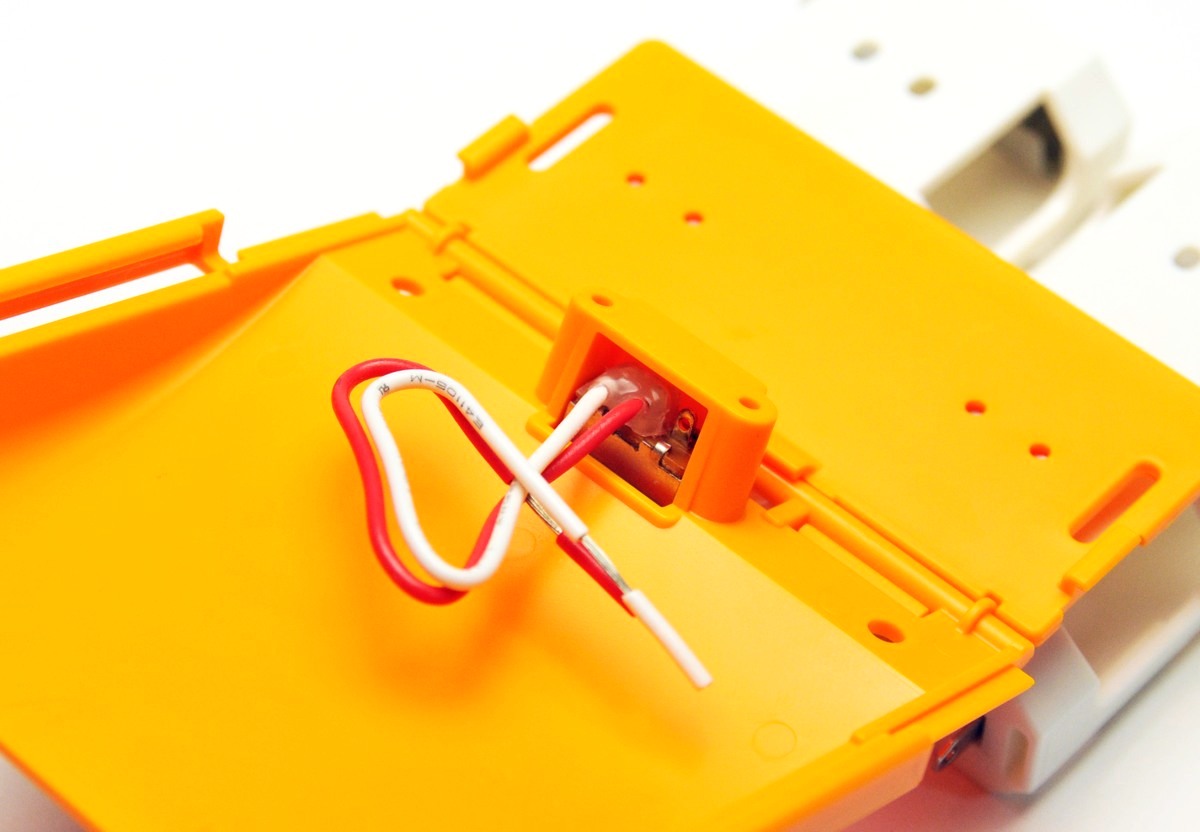
スイッチをルーフに取り付けます。スイッチの白いコードがONの文字側になるように差し込んで、2×6mmタッピングビスでねじ止めします。スイッチの向きを間違えると、ONとOFFが逆転するのでよく確認します。

ルーフを裏側から見たところです。白いコードの位置が図9-2-4-4と同じであることを確認します。
スイッチと電池ボックスをつなぐ
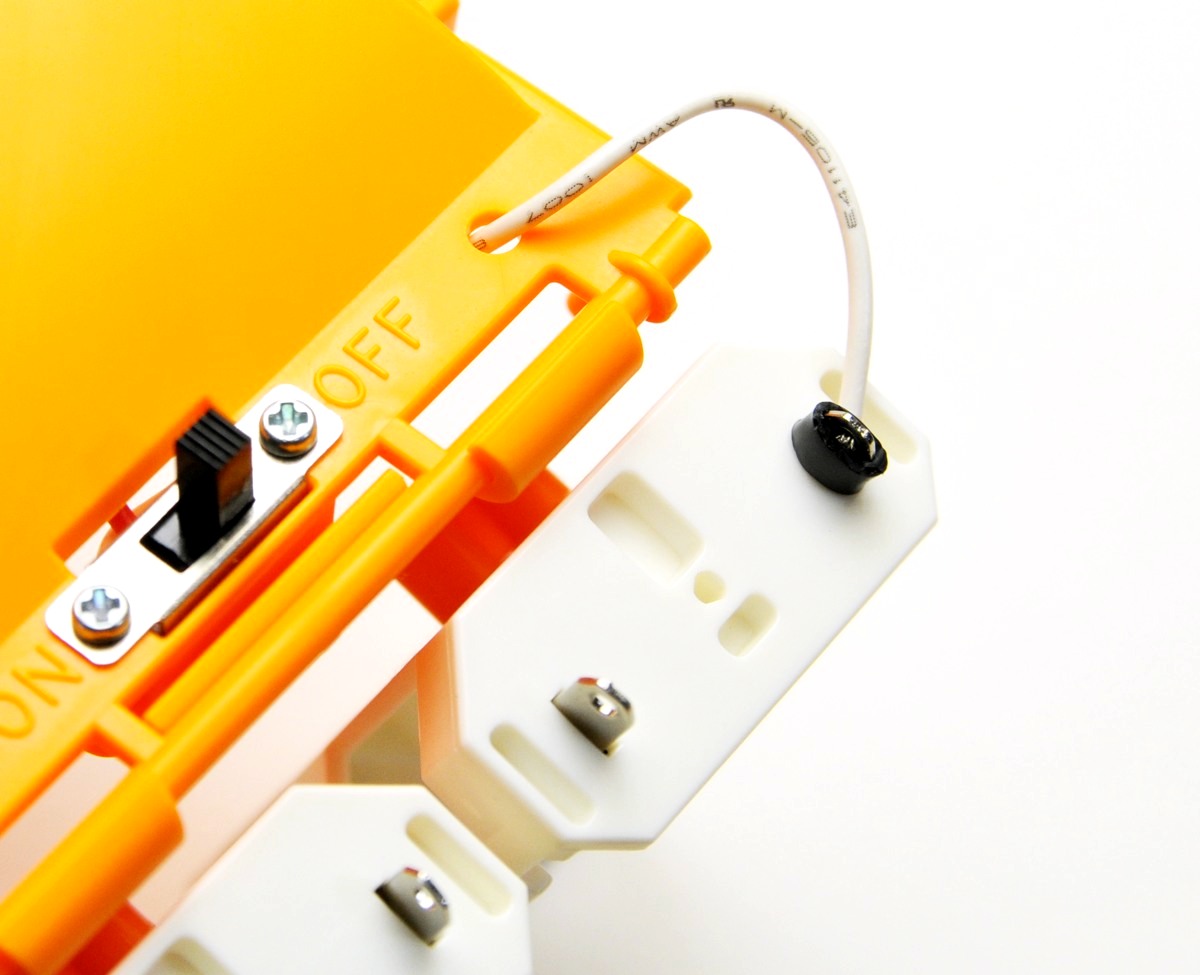
スイッチの白いコードをルーフの穴から上側に出します。

組立説明書の【15】を参考にして、黒いゴムパイプを2mm幅で1個カットします。白いコードの先端を抜き取り、ねじってまとめます。
カムプログラムロボット組立説明書(Page.7)
組立説明書の【16】を参考にして、カットしたゴムパイプを使って、白いコードを電池ボックスのターミナル(向かって右端)に固定します。
カムプログラムロボット組立説明書(Page.7)
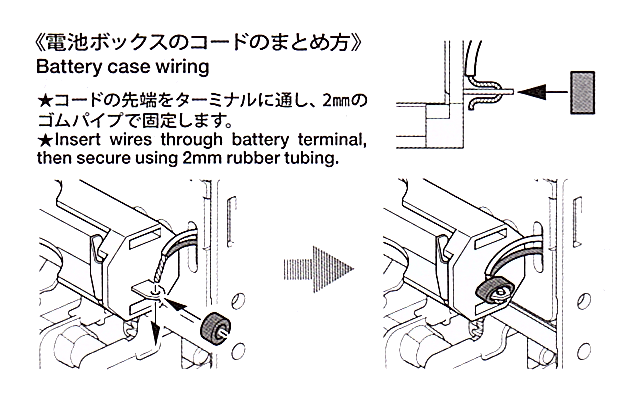
図9-2-4-6は、固定された白いコードのようすです。
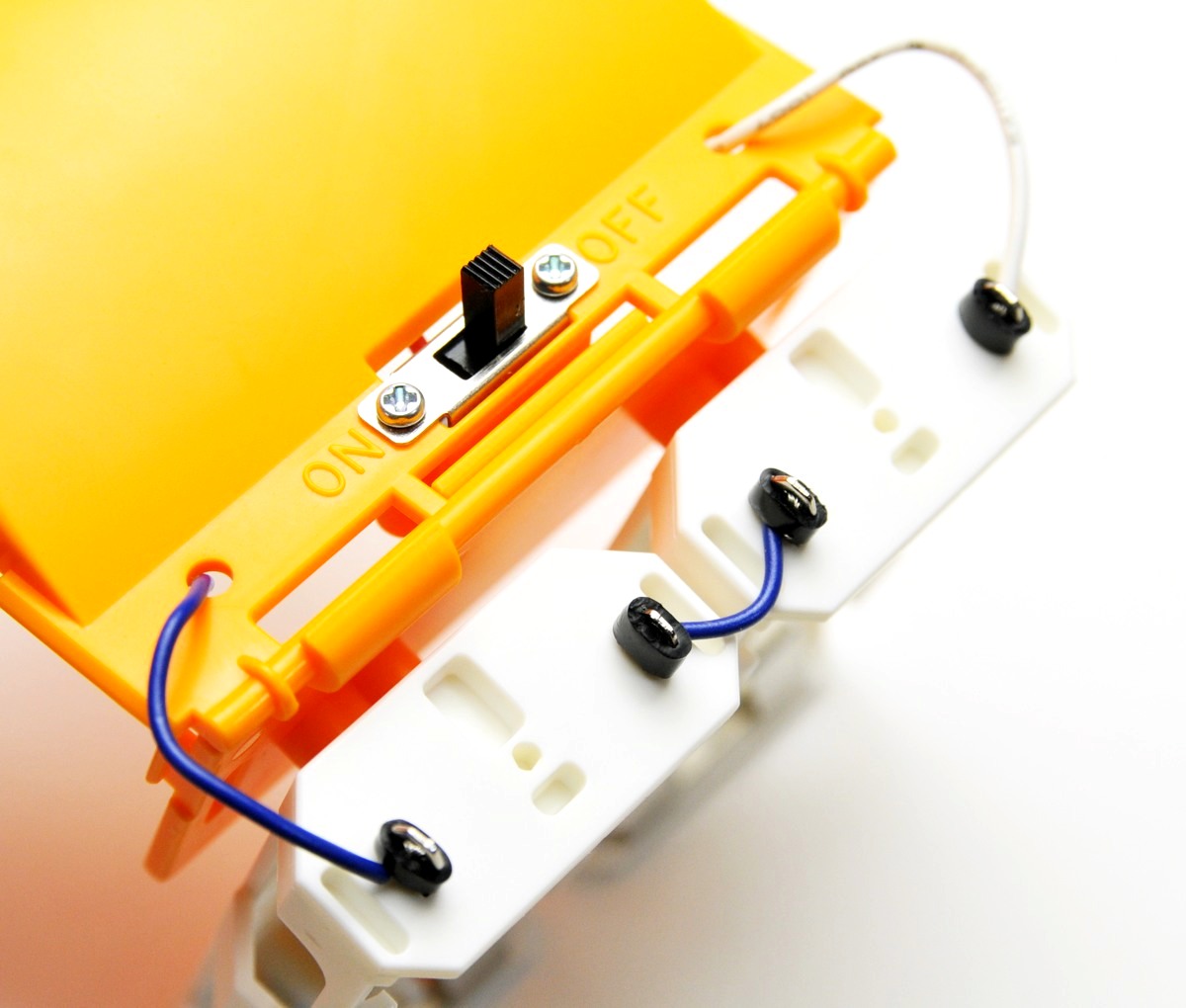
電池ボックスに付属していた青いコードを、25mmと150mmで1本ずつカットして、両端のビニール被覆を5mm程度剥がします。また、黒いゴムパイプを2mm幅で3個カットします。

青いコードをそれぞれ図9-2-4-8のように、カットしたゴムパイプで電池ボックスのターミナルに固定します。
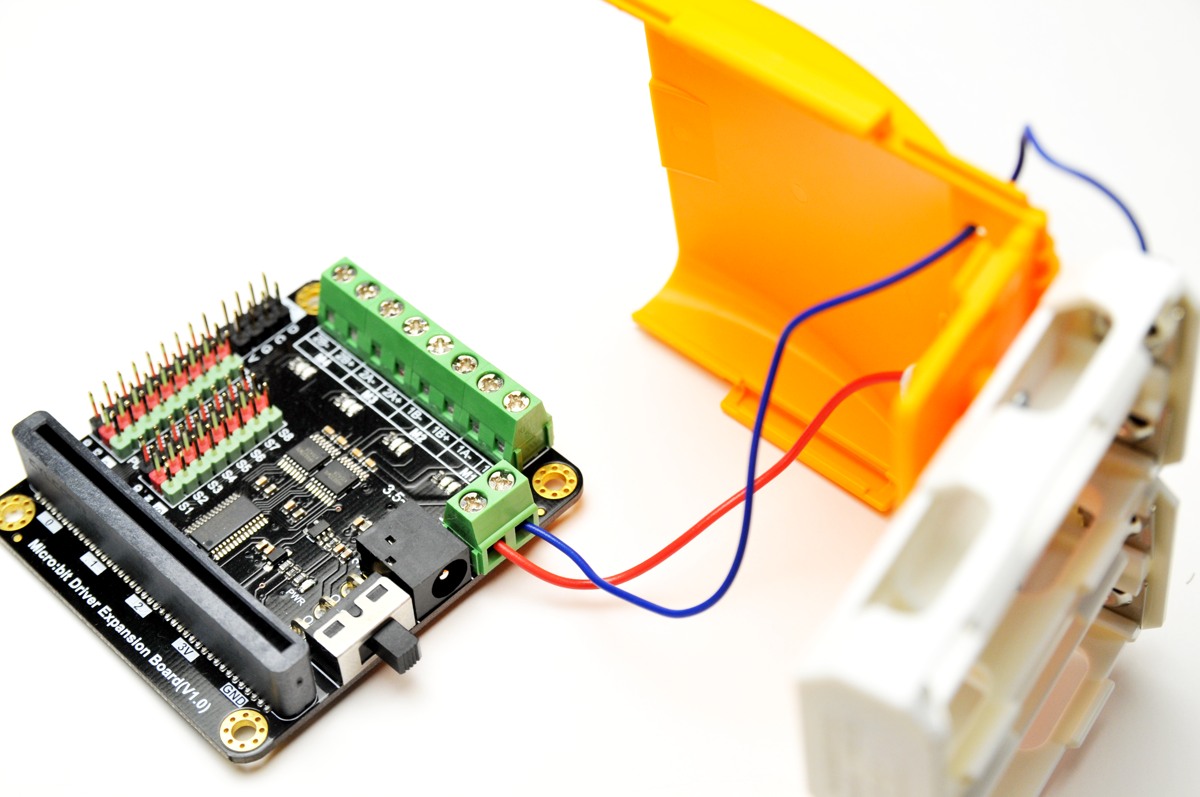
拡張ボードに電源をつなぐ
スイッチから伸びる赤いコードを拡張ボード「Micro:bit Driver Expansion Board」の電源端子(プラス側)、電池ボックスから伸びる青いコードを電源端子(マイナス側)へつなぎます。コードを電源端子の四角い穴へ入れて、上部のネジを締めることで固定されます。
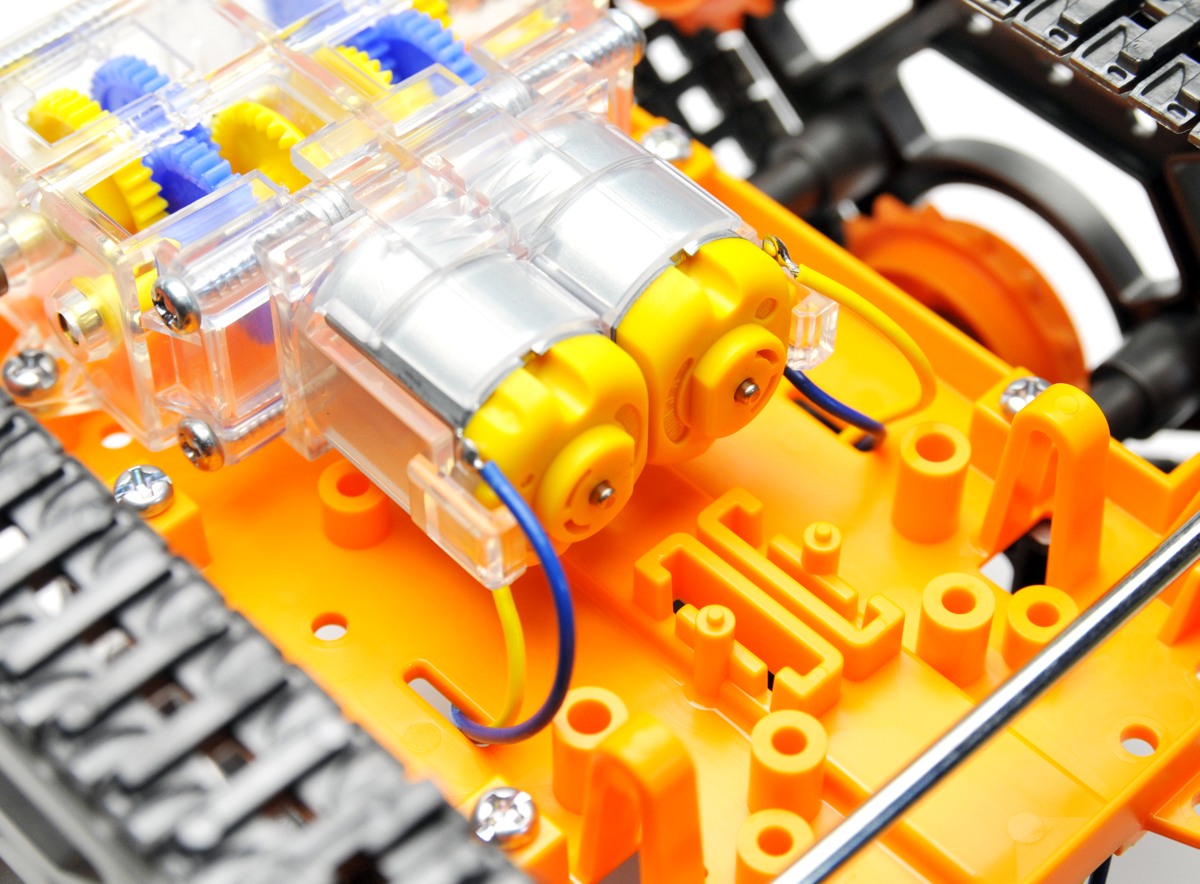
拡張ボードの取り付けとモーターの接続
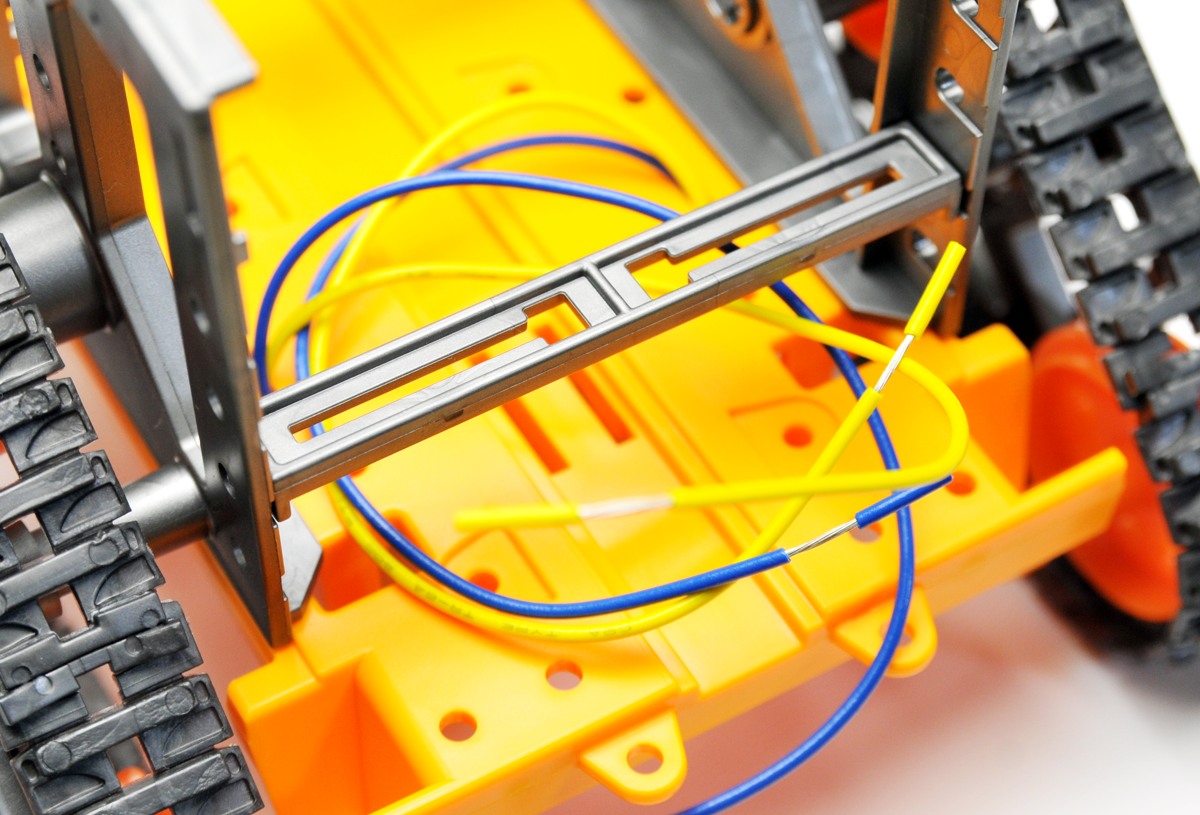
モーターから伸びる青いコードと黄色いコードをパーツB2のスリットを通して、反対側(上側)へ引き出します。
引き出したコードは、パーツA2が付いていないサイドフレームサポート(A3)の下を通しておきます。
拡張ボードの四隅に開いた穴のうち、二つをサイドフレームサポート上のパーツA2へ差し込んで取り付けます。拡張ボード上のスイッチをONの位置にします。
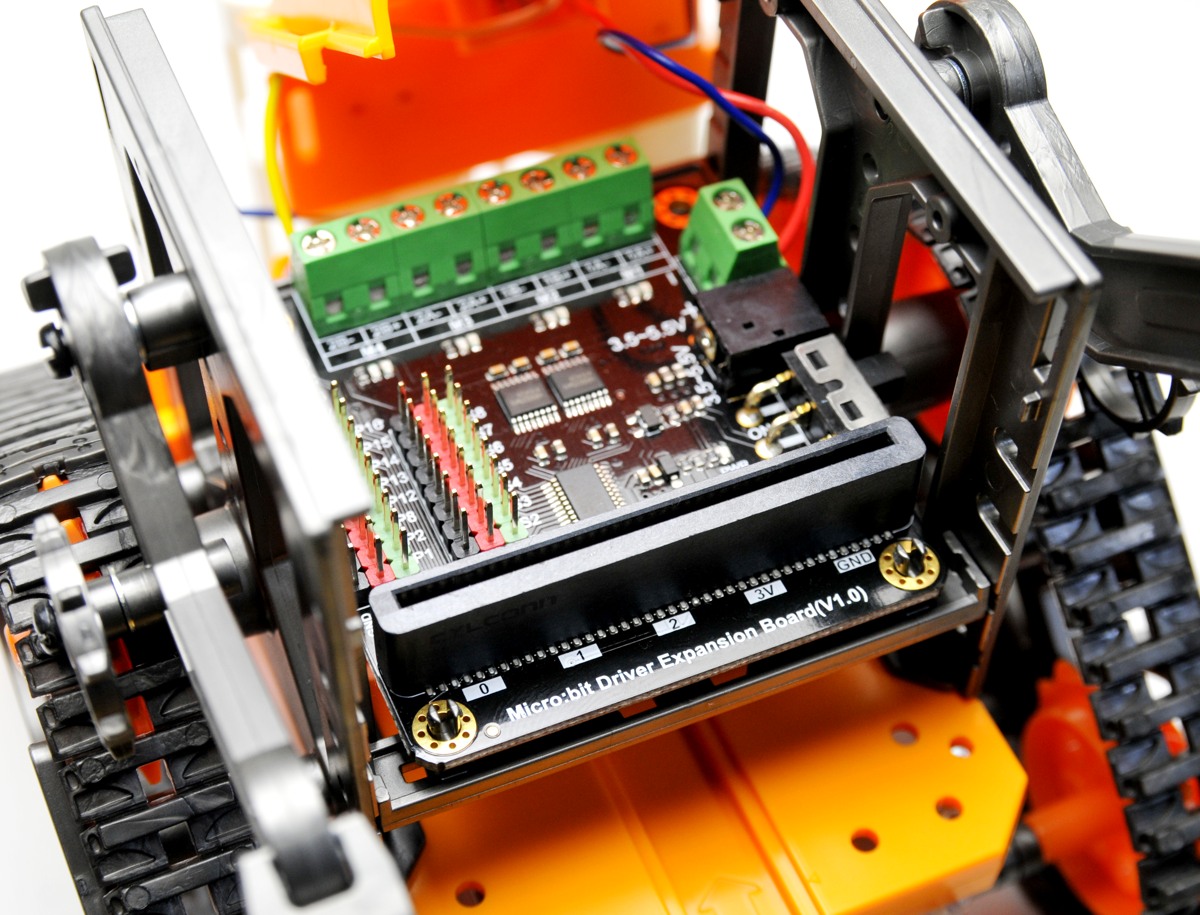
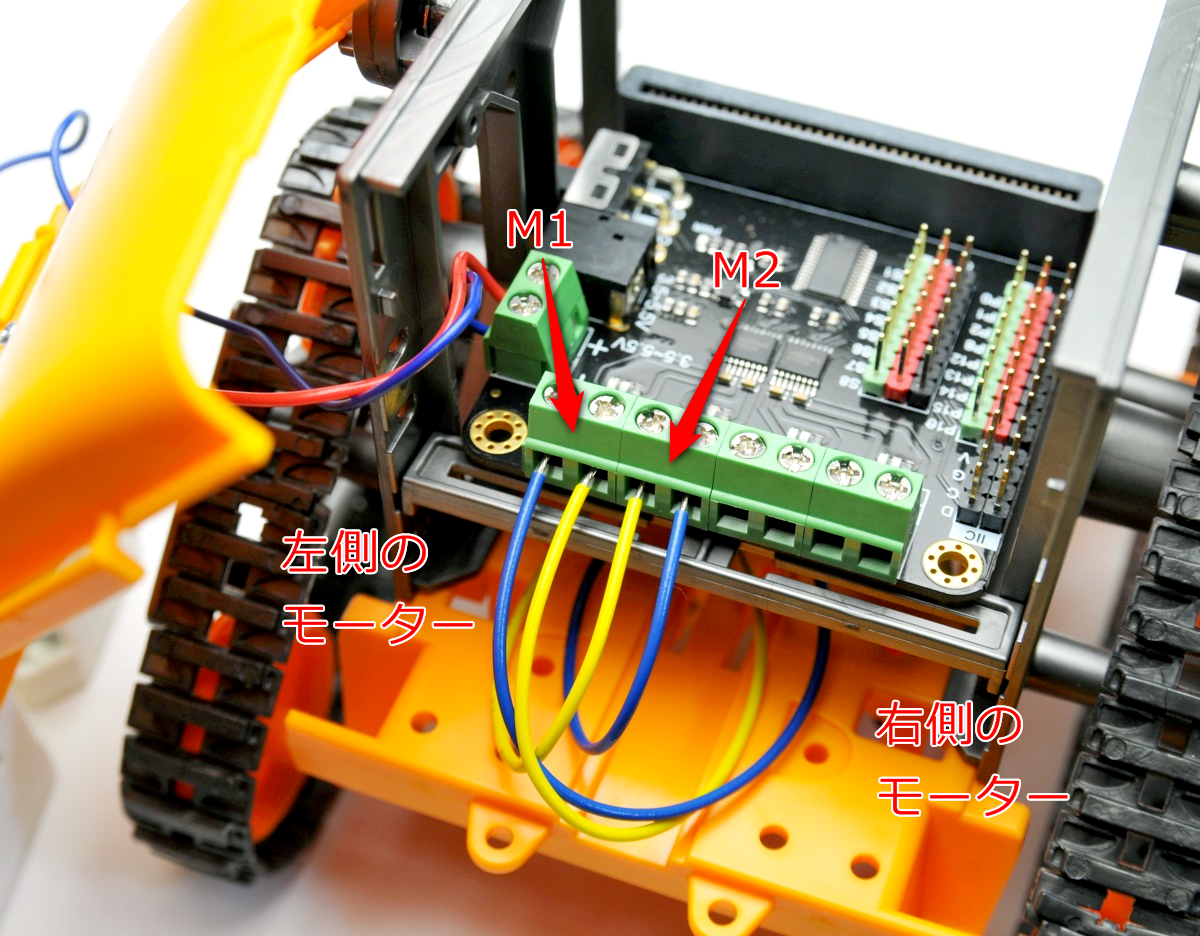
拡張ボードのモーター端子はM1~M4までの4つありますが、今回使用するのはM1とM2です。M1にカムロボの背面から見て左側のモーターから伸びるコード、M2に右側のモーターから伸びるコードをつなぎます。青いコードと黄色いコードを図9-2-4-13のようにつなぎます。
拡張ボードにmicro:bitを差し込んで取り付けます。
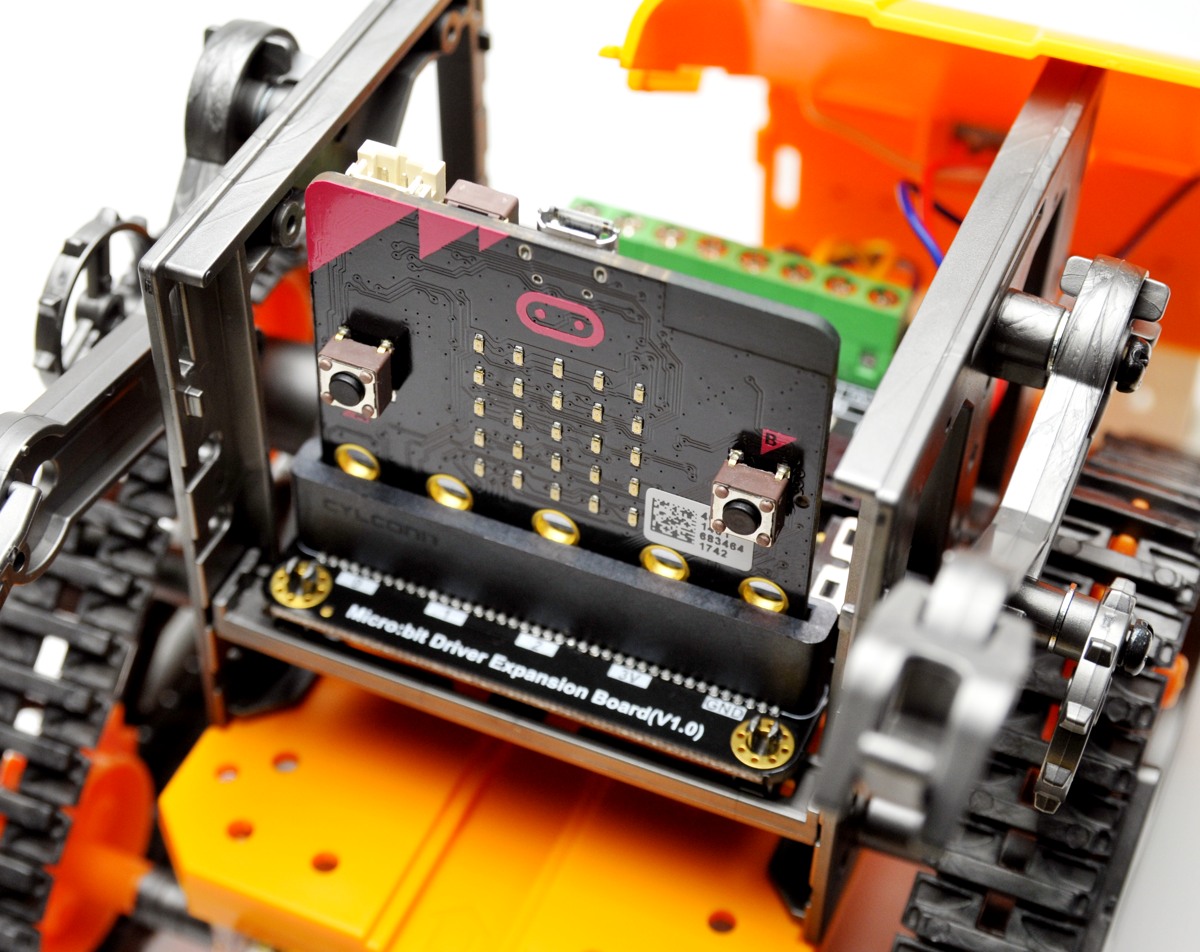
ルーフとパーツB5を取り付けて完成です。


おすすめ品



タミヤ プログラミング工作シリーズ No.01 マイコンロボット工作セット
超音波センサー、駆動回路を搭載したクローラー走行のロボット工作セットです。インストールされた走行プログラムを元に2つのモーターをコントロール、障害物を避けて自動走行します。











