Maker Faire Tokyo 2024(出展の告知)

2024年9月21日~22日の2日間、東京ビッグサイトで開催される「Maker Faire Tokyo 2024」に出展します。micro:bitをこよなく愛するmicro:bit championによるmicro:bitを使った幅広い作品を多数展示します。
Maker Faire Tokyo 2024
Maker Faire Tokyo 2024
2024年9月21日~22日の2日間、東京ビッグサイトにて「Maker Faire Tokyo 2024」が開催されます。
Maker Faire(メイカーフェア)は、誰でも使えるようになった新しいテクノロジー(カードサイズの教育用コンピューター、3Dプリンター、AIなど)を中心に、さまざまな材料・素材をユニークな発想で使いこなし、皆があっと驚くようなユニークなものや、大量生産では作れない、一人ひとりが本当に欲しいものを作り上げる「メイカー(Maker)」のお祭りです。
開催概要 はじめに
micro:bit champions & friends(A-03-05)
約10名のmicro:bitをこよなく愛するmicro:bit championが製作した作品を持ち寄って「micro:bit champions & friends(A-03-05)」を出展します。もちろん、すべてmicro:bitを使った作品です。それぞれの作品は「micro:bit champions & friends Maker Faire Tokyo 2024 展示予定作品一覧」で紹介しています。

私もmicro:bit championの一人として、以下の作品を展示します。
- micro:bit痛バッグ(痛バ)
- 四脚歩行から四輪走行へトランスフォームするロボ
- マイクロビット・メイズ(micro:bit Maze)
- メカナムホイールロボットカー
出展作品の紹介
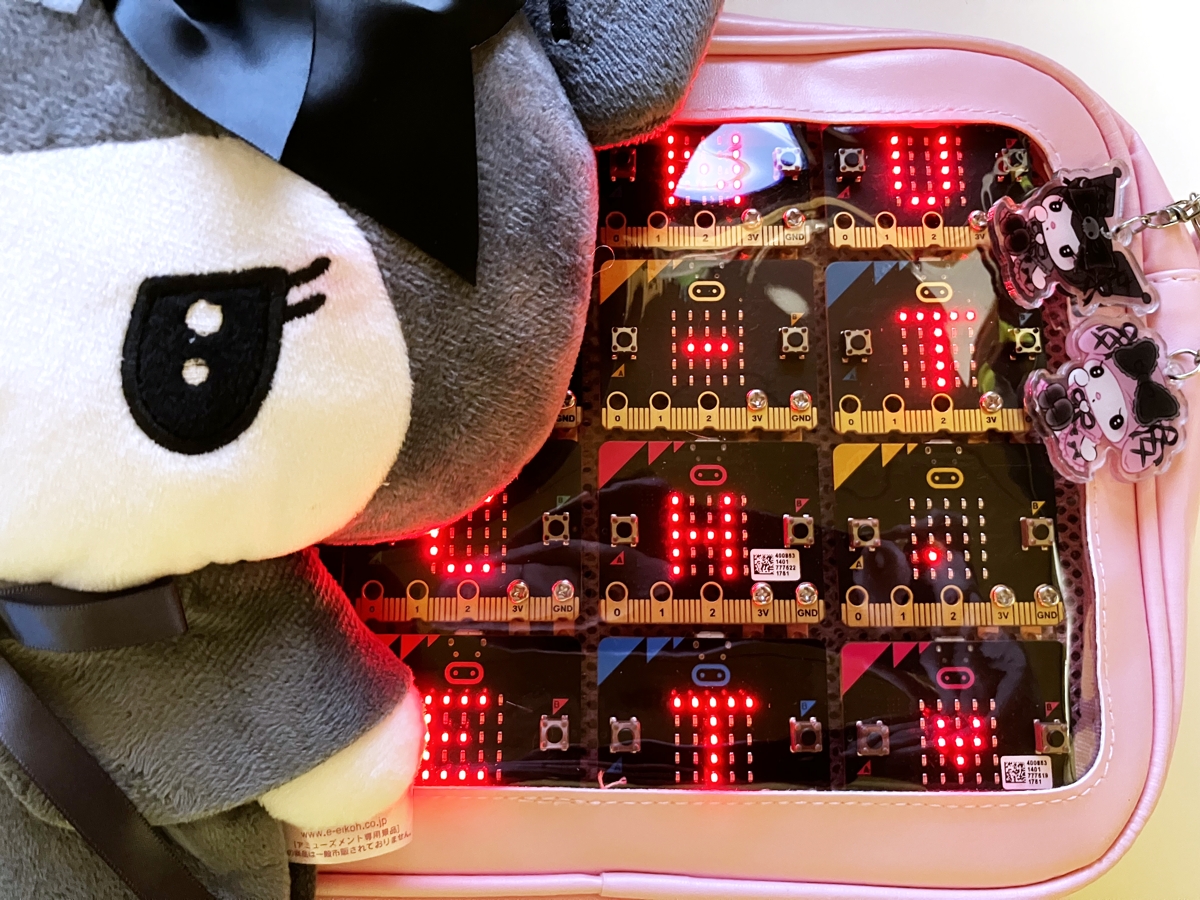
micro:bit痛バッグ(痛バ)
推し活のひとつとして定番アイテムの痛バッグ(通称、痛バ)です。缶バッチの代わりに、16枚のmicro:bitを使って、micro:bitへの惜しみない愛を表現しました。コントローラー用micro:bitから無線制御され、それぞれが異なる文字やイラストを表示します。
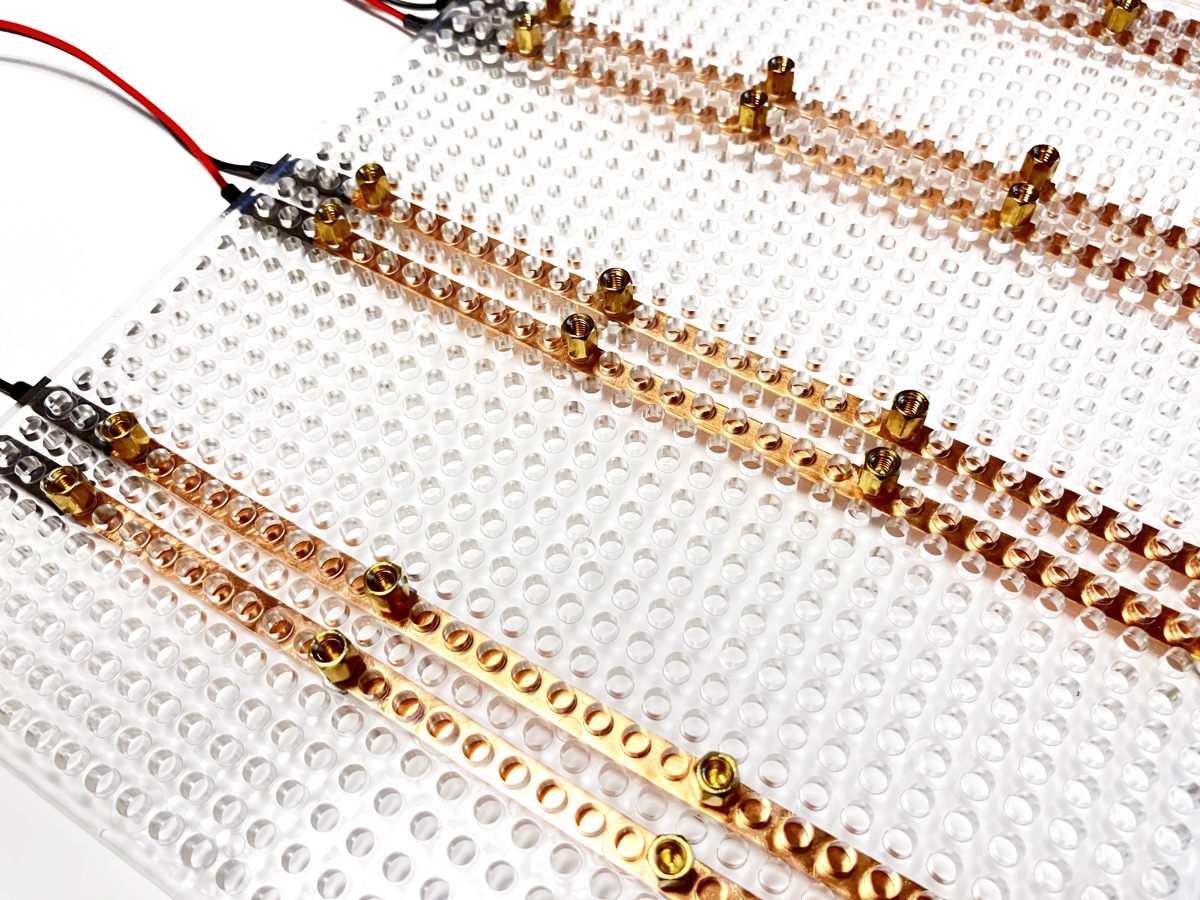
内部の配線です。
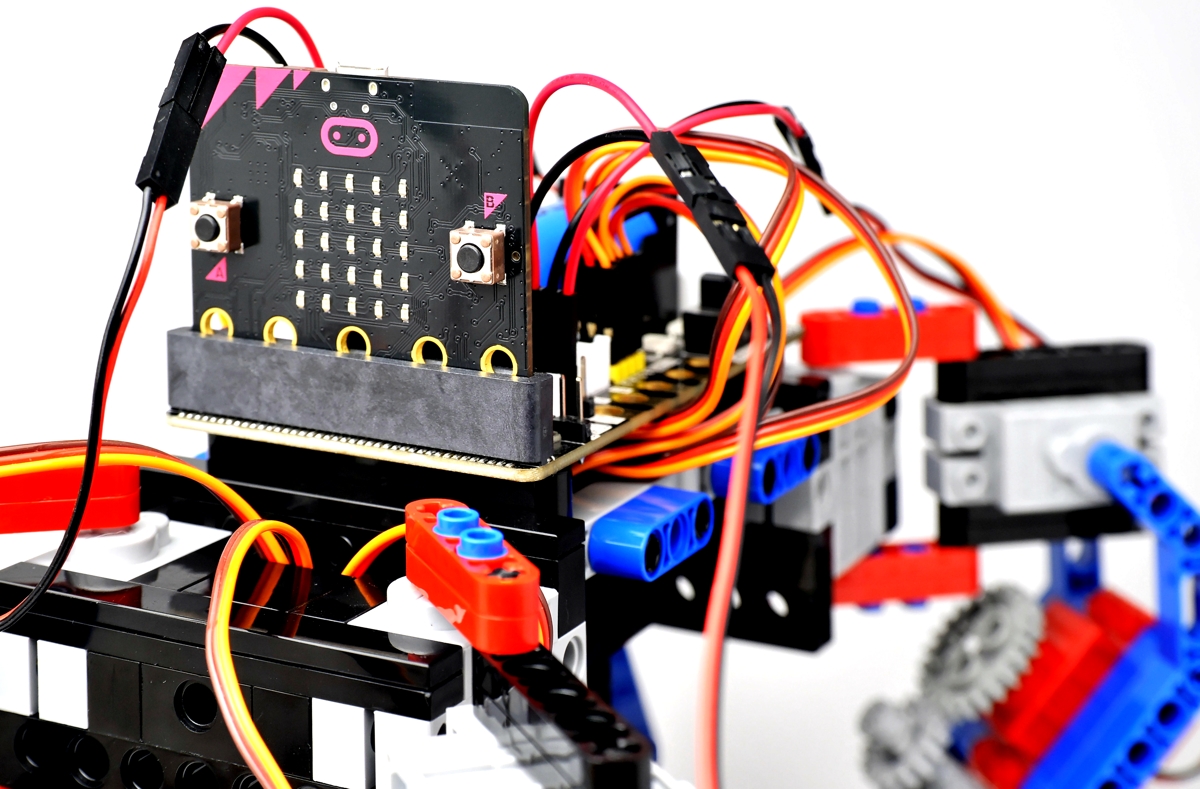
四脚歩行から四輪走行へトランスフォームするロボ
LEGOブロックの中でも、よりテクニカルなモデルを作ることができる「テクニックシリーズ」を使って製作したロボットです。8つのサーボモーターで制御された四脚歩行と、4つのDCモーターで制御された四輪走行を切り替えて移動することができます。
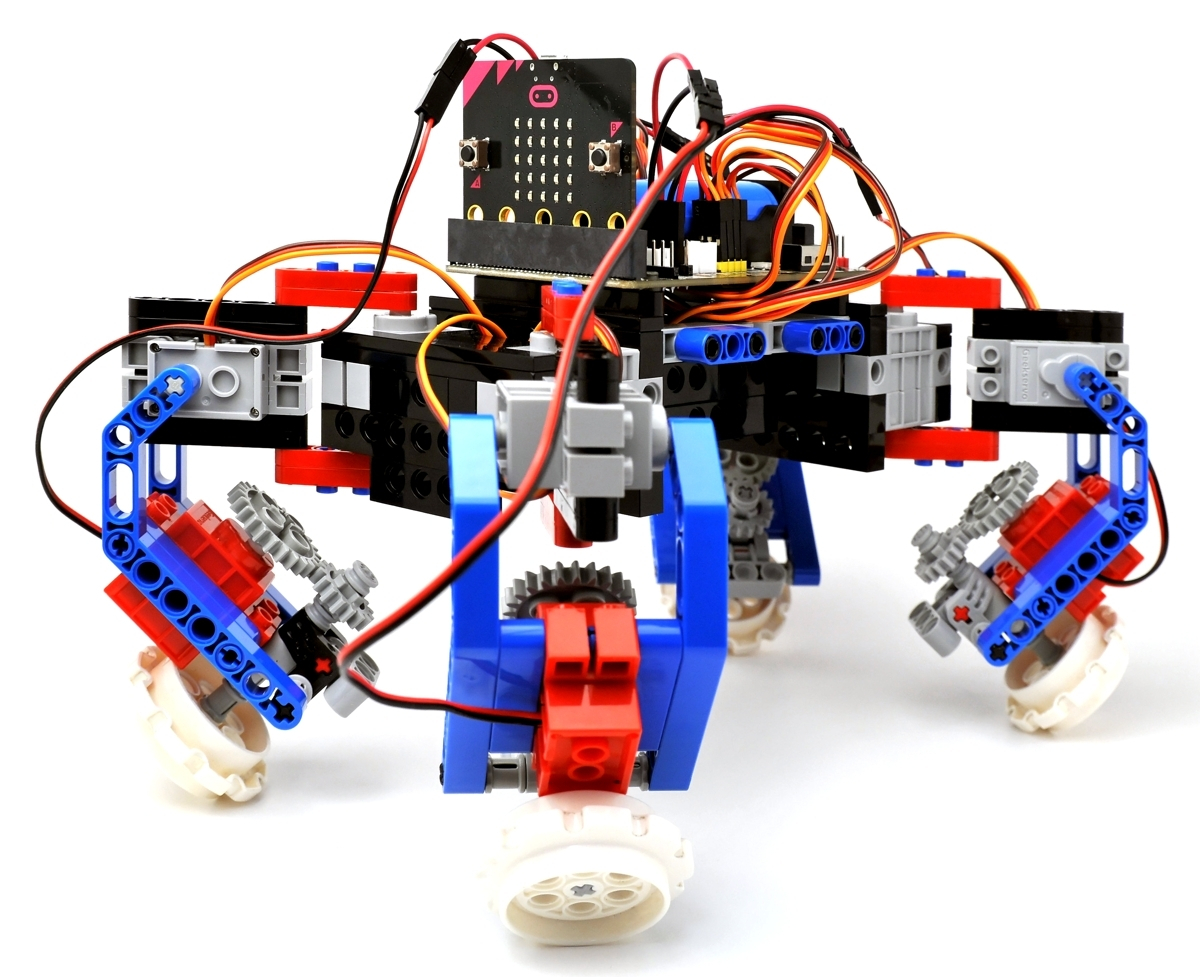
micro:bitと拡張ボード「Super:bit expansion board」を使って、8つのサーボモーターと4つのDCモーターを制御しています。
走行用のDCモーターです。
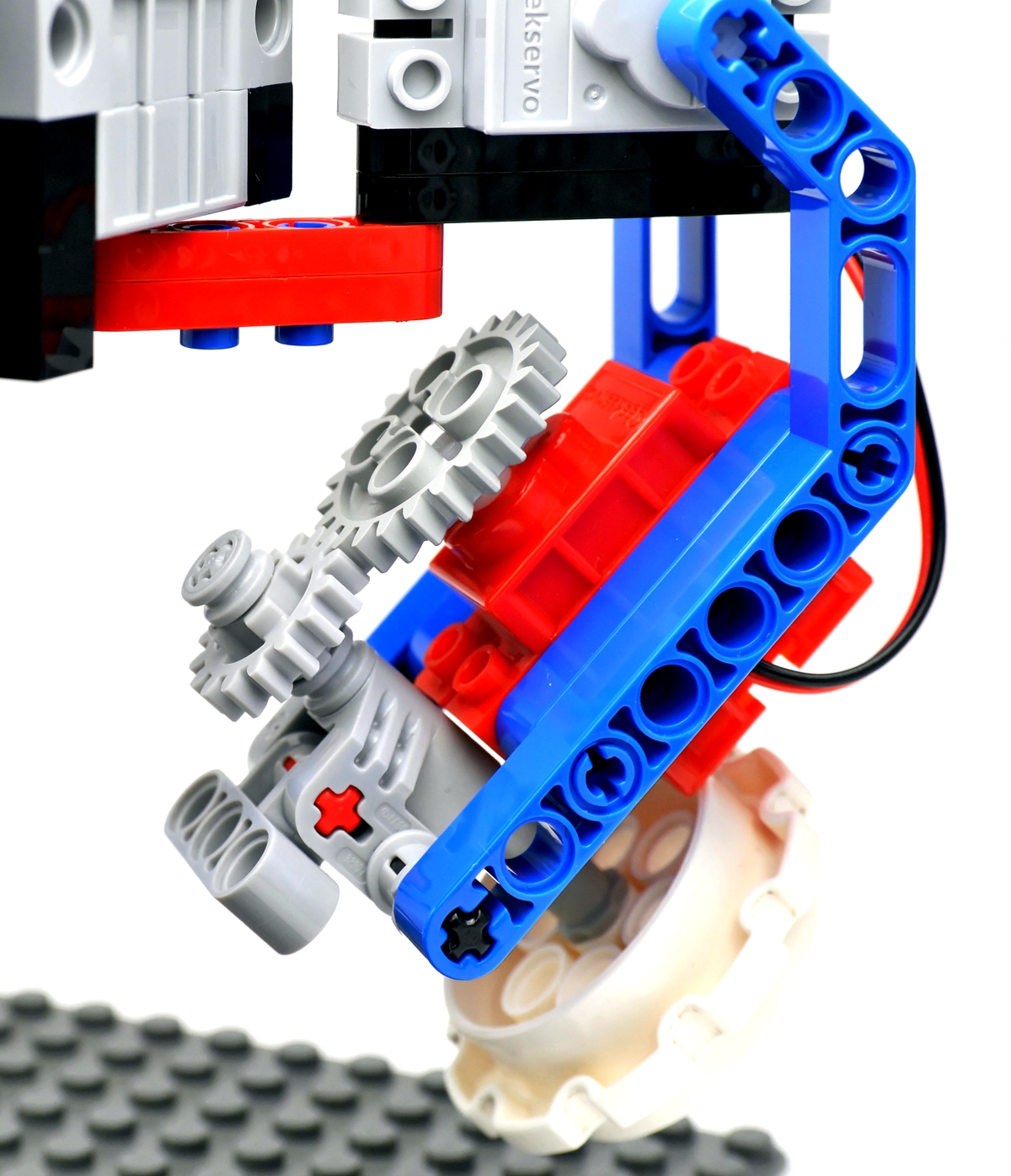
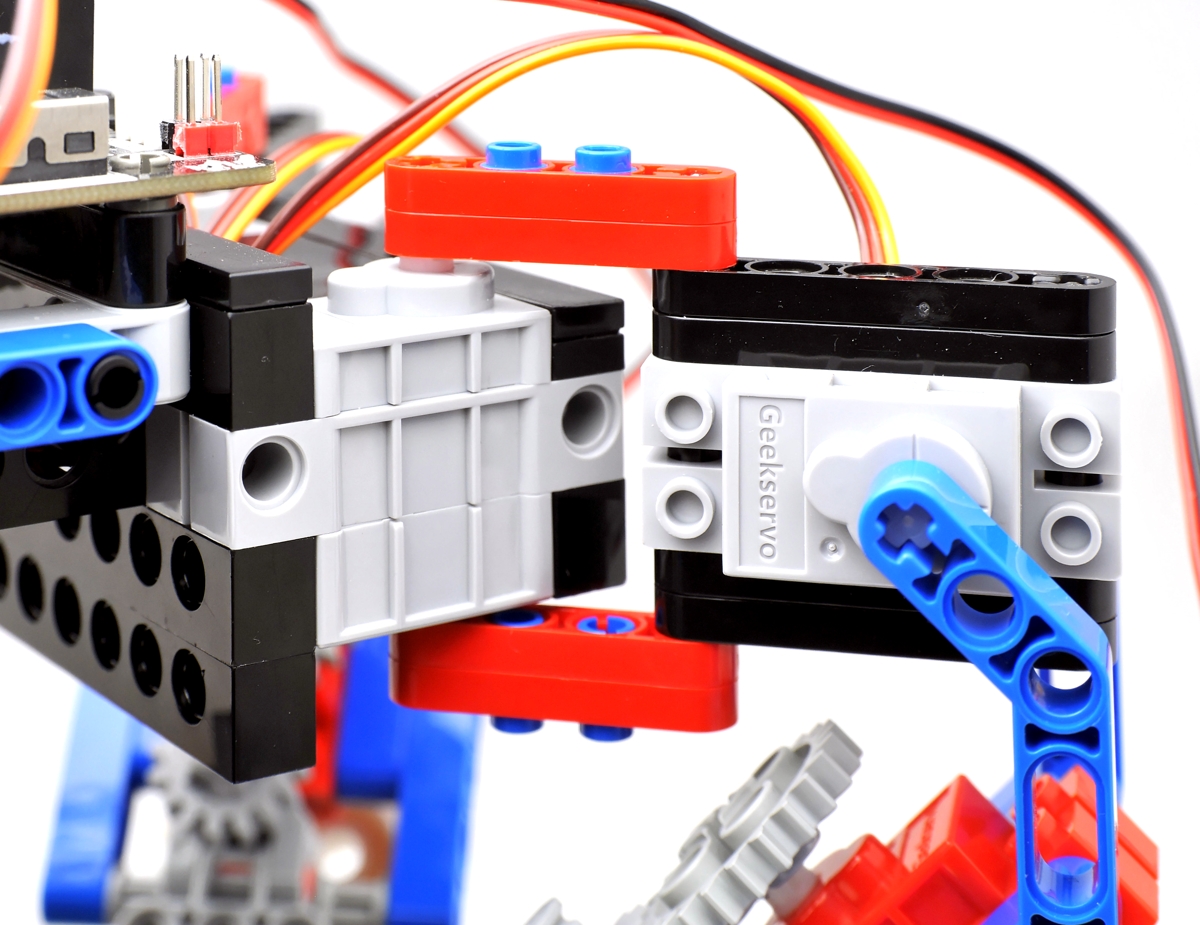
歩行用のサーボモーターです。
マイクロビット・メイズ(micro:bit Maze)
ビー玉をスタートからゴールまで転がす「迷路脱出ゲーム」です。マイクロビットを内蔵したコントローラーを操作して、立体迷路を前後左右に傾け、ビー玉を移動させます。迷路は、別のマイクロビットで制御された二軸のロボットアームの先端に取り付けられています。コントローラーの傾きを、加速度センサーで検出、無線機能でロボットアーム側に送信します。ロボットアーム側のマイクロビットで、2つのサーボモーターを制御して、迷路を前後左右に傾けます。


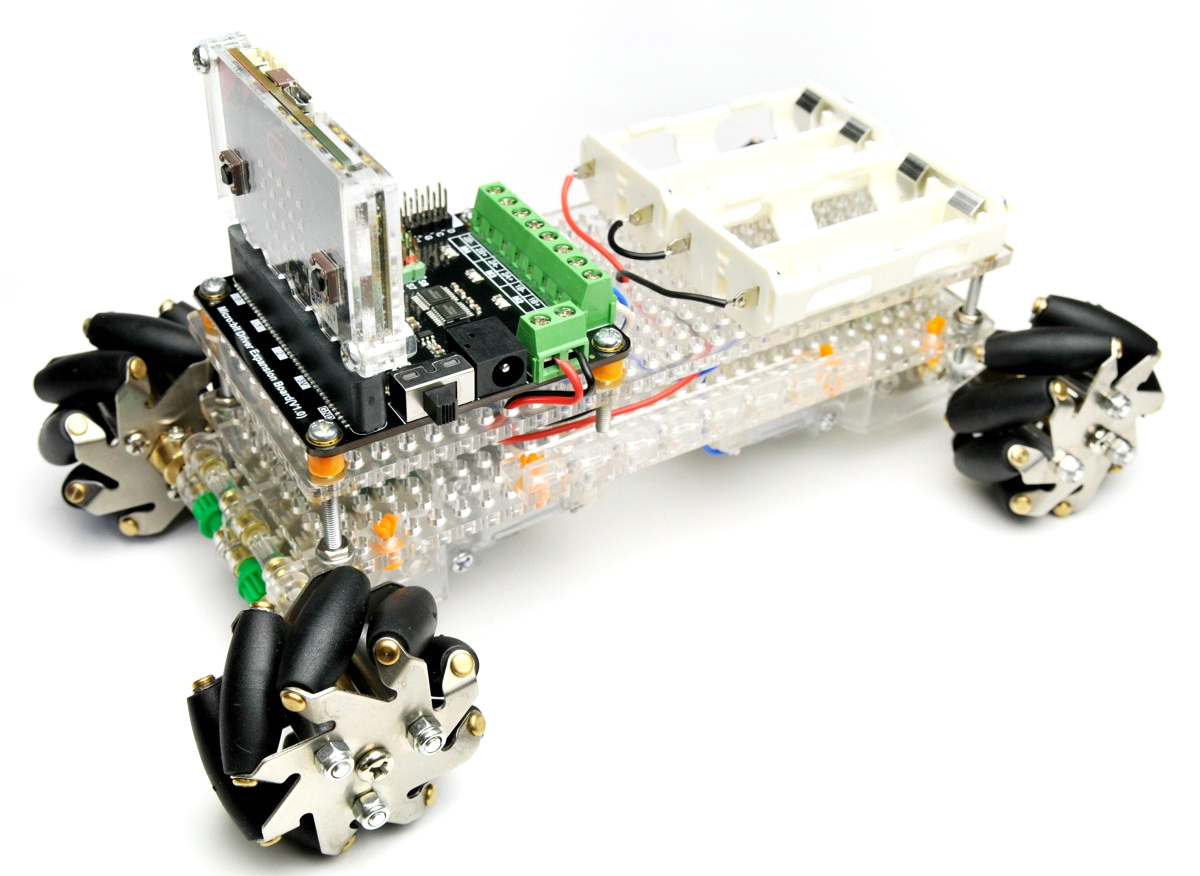
メカナムホイールロボットカー
メカナムホイールと呼ばれる「ホイールの車軸に対して、45度の角度で樽形の小型ローラーが配置された特殊なホイール」を用いたロボットカーです。各ホイールの回転方向を制御することで、前進・後進・左右への回転だけでなく、車体の向きを固定したまま左右へ移動したり、斜め方向へ進むことができます。