ロボットアーム(中)を作る
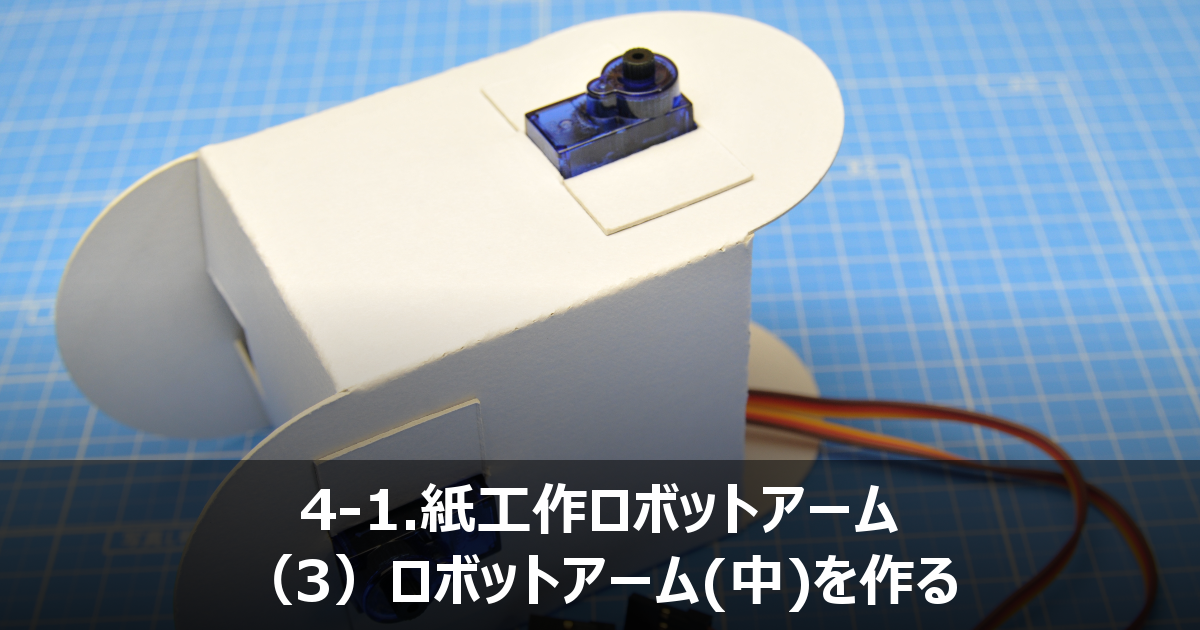
2個のサーボモーターを使用して、ボール紙で二軸のロボットアームを作ります。この記事では、ロボットアーム(中)の作り方について解説します。
紙工作ロボットアーム製作の工程(目次)
- 準備するもの
- 展開図のダウンロードと印刷
- ロボットアーム(中)を作る・・・いま読んでいる記事
- ロボットアーム(先)を作る
- ロボットアーム(元)を作る
- 組み立てる
ロボットアーム(中)
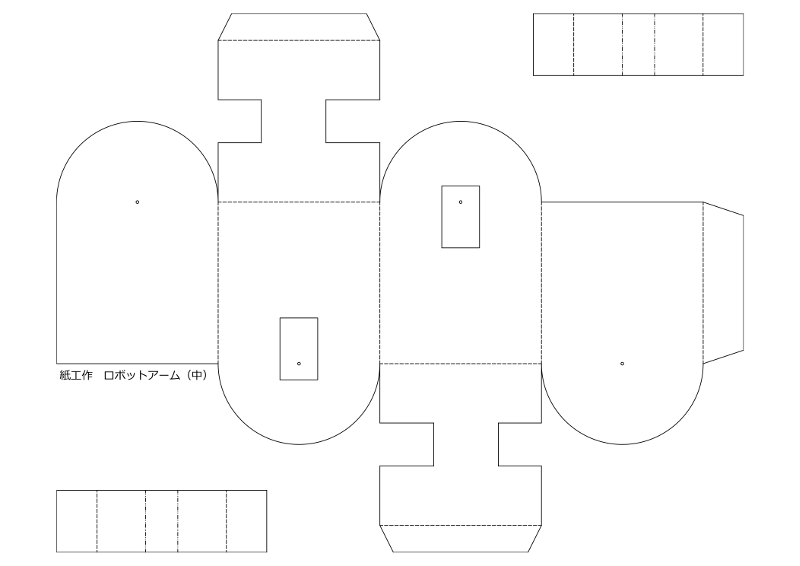
「(2)展開図のダウンロードと印刷」から展開図のPDFファイルをダウンロードして、A4サイズのボール紙に印刷します。
ロボットアーム(中)は、2個のサーボモーターを内蔵するロボットアームの要となる部分で、アームの中央部分になります。展開図に含まれるのは、アームの筐体とサーボモーターを固定するパーツです。
パーツの切り取り
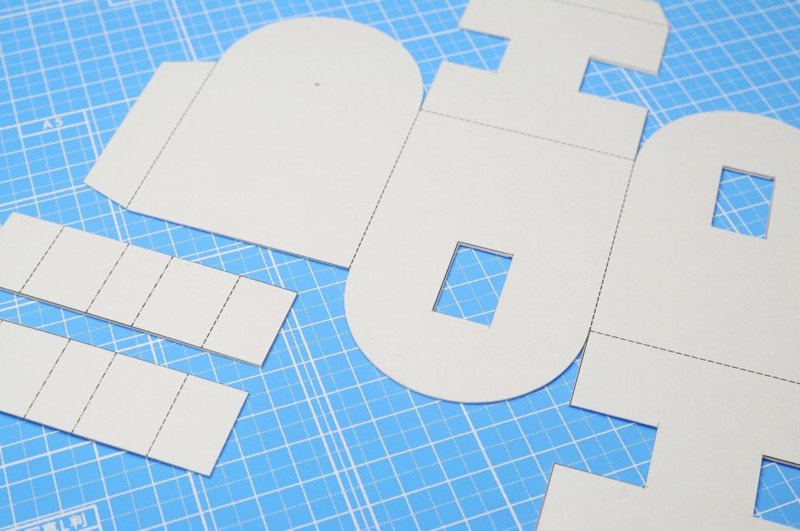
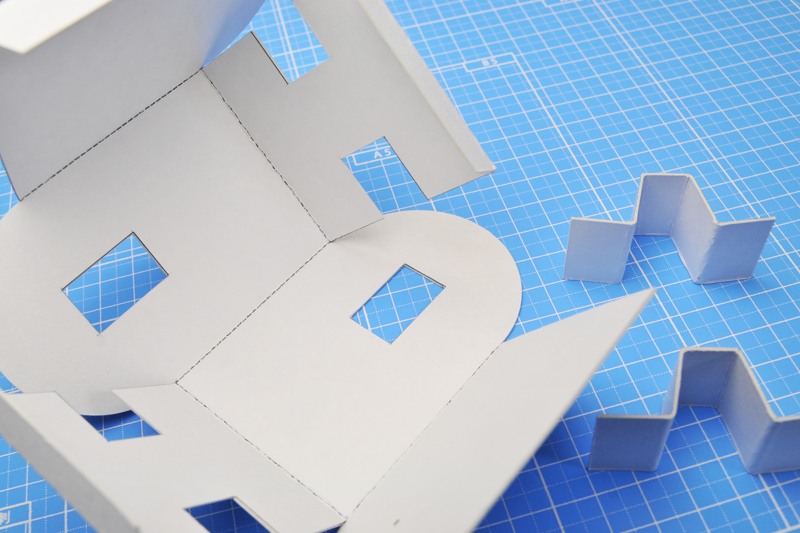
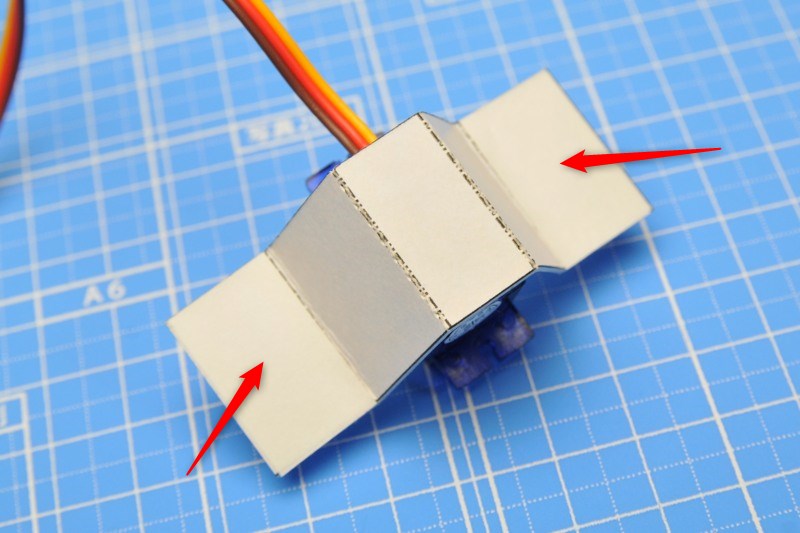
ボール紙からパーツを切り取ります。図4-1-3-2のように切り取り線(実線)に沿って、パーツを切り取ります。
コンパスカッターを使う場合は、最初に円の部分に切り込みを入れておきましょう。図4-1-3-3は、切り取ったパーツです。
折り曲げる
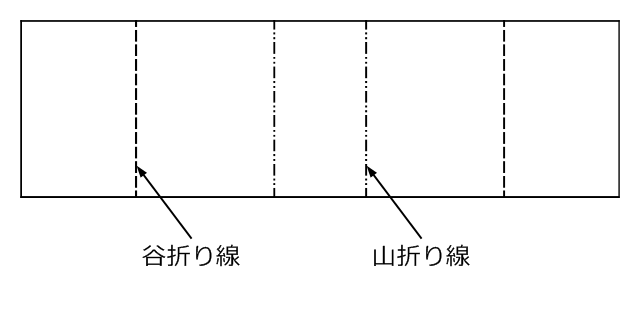
切り取ったパーツの折り線に沿って、あらかじめ折ります。図4-1-3-4のように山折り線(二点鎖線)と谷折り線(破線)があります。
ルレットを使って、印を付けておくと、キレイに折り曲げることができます。

図4-1-3-6は、折り曲げたパーツです。
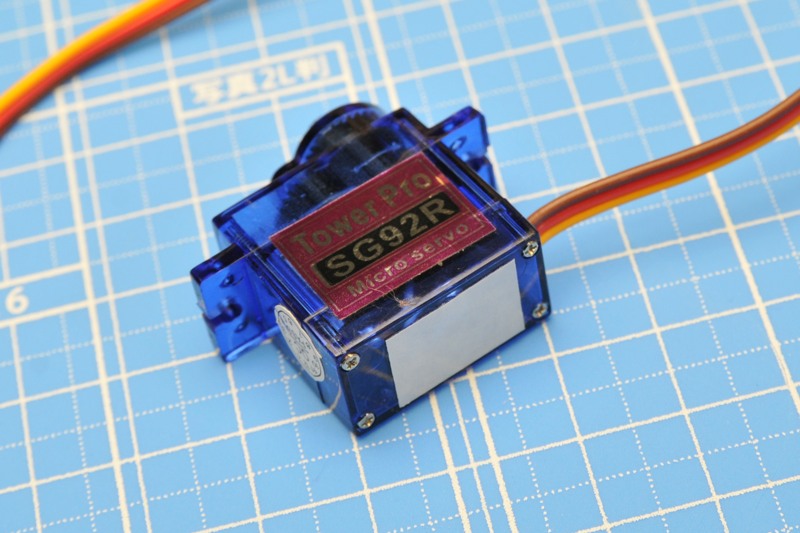
サーボモーターの取り付け
サーボモーターの底面に、両面テープを付けます。
サーボモーターに固定するパーツを貼り合わせます。
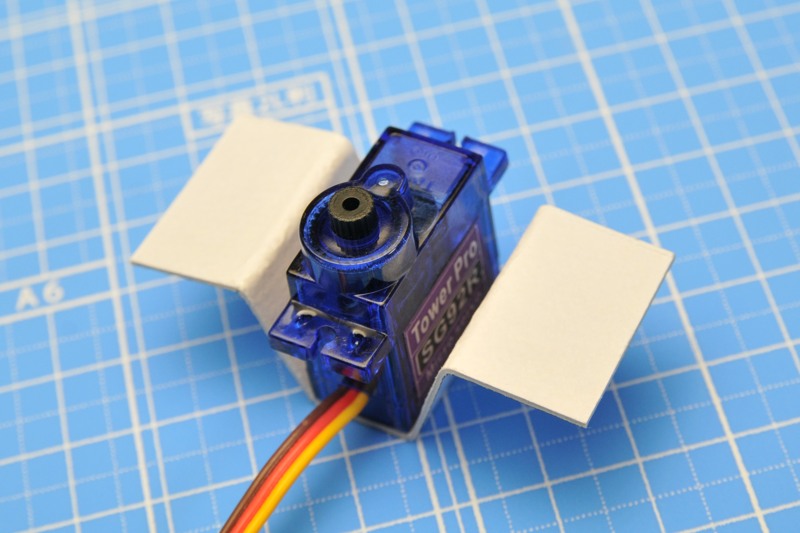
サーボモーターを固定するパーツの羽の裏面に両面テープを付けます。
両面テープのはく離紙は剥がさず、そのままサーボモーターの取り付け穴に差し込みます。サーボモーターの向きに注意してください。
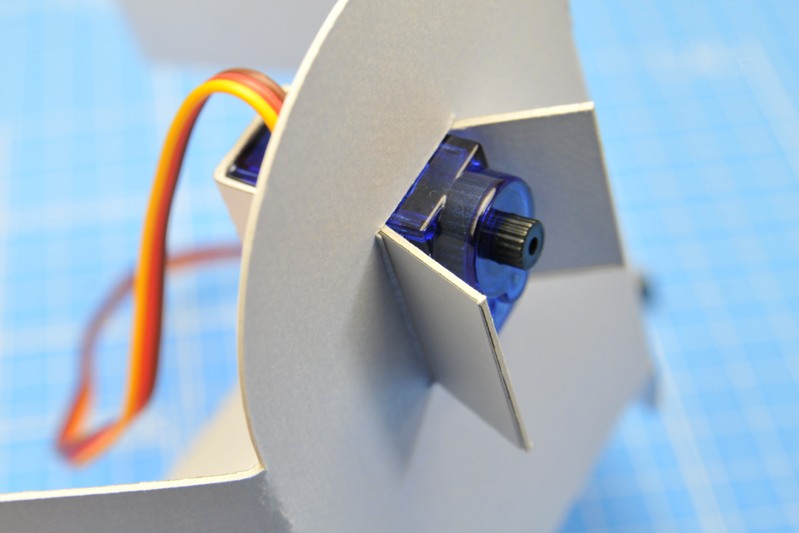
両面テープのはく離紙を剥がし、接着します。
同様にして、もう一つのサーボモーターも取り付けます。サーボモーターの向きに注意してください。

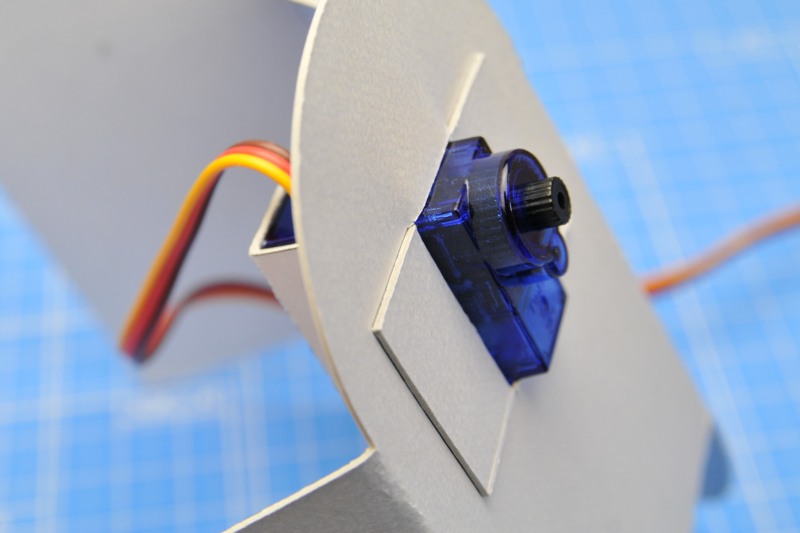
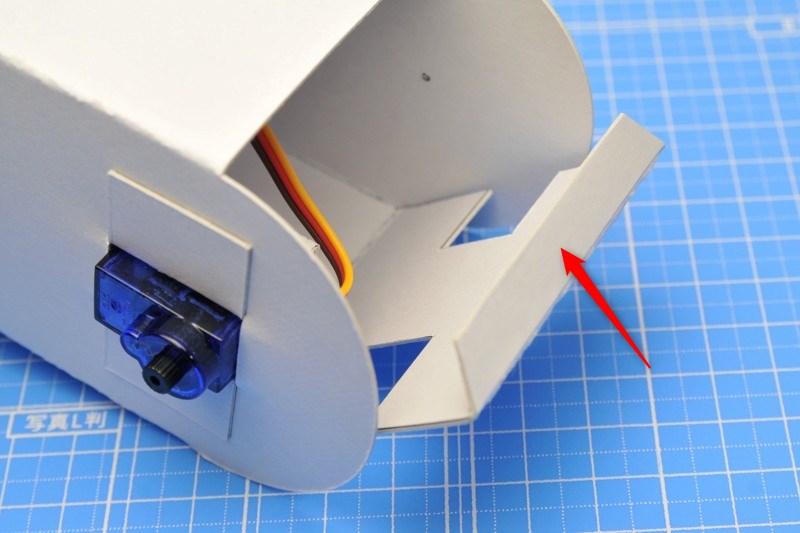
筐体の組み立て
図4-1-3-13を参考にして、両面テープを付けます。
接着します。

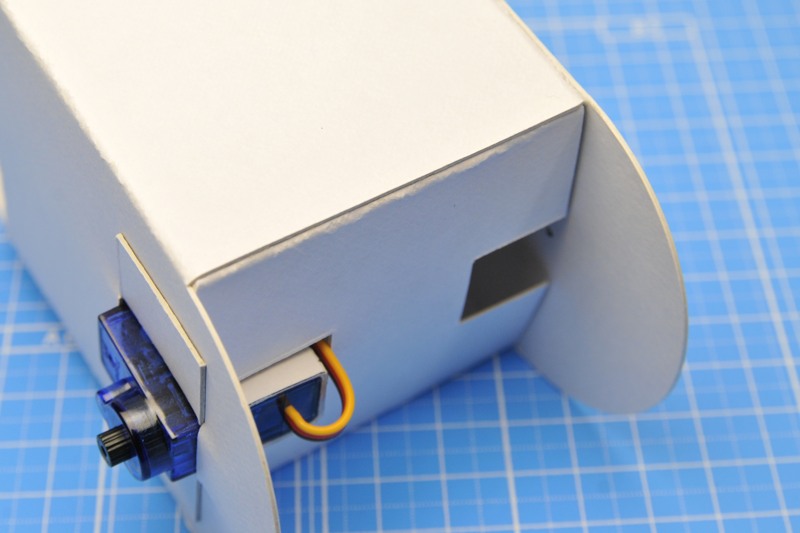
図4-1-3-15を参考にして、両面テープを付けます。
接着します。サーボモーターのケーブルは、図4-1-3-16のようにします。
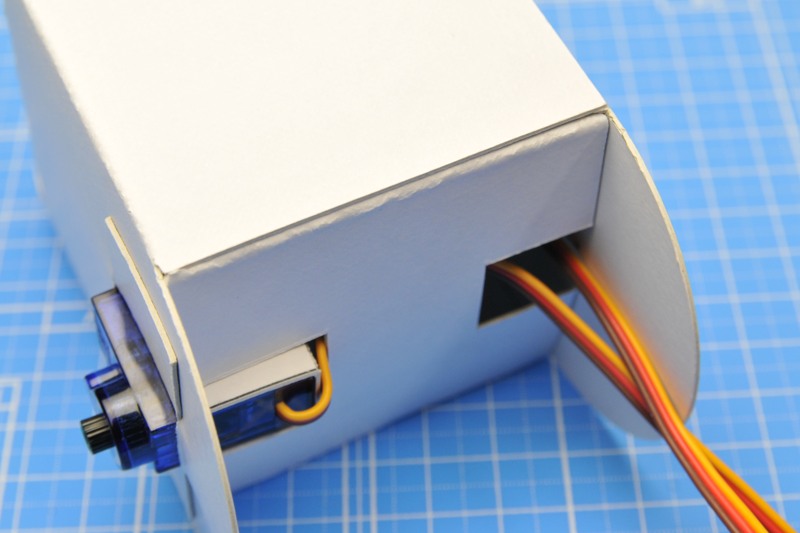
同様にして、反対側も接着します。サーボモーターのケーブルは、図4-1-3-17のようにします。
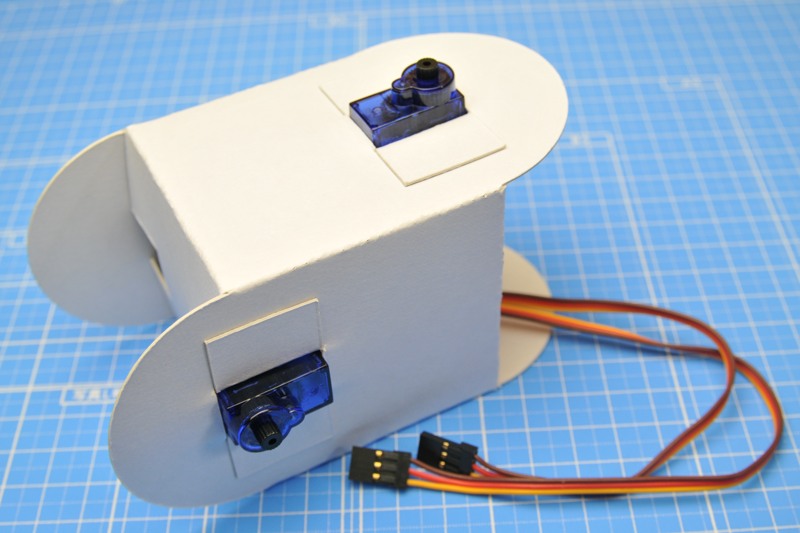
完成したロボットアーム(中)
ロボットアーム(中)の完成です。
micro:bit Lab.【マイクロビット】
micro:bit Lab.では、micro:bit【マイクロビット】に関する情報を紹介しています。



【v2対応】micro:bitであそぼう! たのしい電子工作&プログラミング


micro:bitではじめるプログラミング 第3版 ―親子で学べるプログラミングとエレクトロニクス (Make: KIDS)





Labsの一覧
閲覧中の記事タイトル
micro:bit【マイクロビット】紙工作ロボットアーム - (3)ロボットアーム(中)を作る | micro:bit Lab.【マイクロビット】
この記事を書いた人
泉保宗也(せんぼむねや)。香川県在住。1969年生まれ。有限会社サヌキドットコム代表。
SNSによる情報発信
このサイトについて
サヌキテックネットは、「ものづくり:make」を楽しみながら学ぶ人へ向けた独習サポートサイトです。対象は、これから「ものづくり人:maker」を目指す人。自分が「悩んで調べたこと」を書いていけば、きっと誰かの参考になるはずという想いのもと、記事を配信しています。「知識と経験を以て、知恵と成す」
このサイトのブログシステム(CMS)
サヌキテックネットは、有限会社サヌキドットコム(香川県)のブログシステム(CMS)を使用しています。
姉妹サイトの紹介
カガウェブ[KAGAWA WEB]は、ちょっぴりディープに香川県の魅力を発信するローカルWEBマガジンです。
ご意見・お問い合わせ
サヌキテックネットをご利用頂きありがとうございます。当サイトへのご意見・ご要望をお聞かせください。
個人情報の取り扱い
サヌキテックネットの個人情報の取り扱いについては、個人情報保護に関する取り組みをご覧ください。
記事の正確性
記事の正確性には努めていますが、掲載内容に誤りがありましたら、ご指摘頂ければ幸いです。
SSL(HTTPS)
このサイトは、安全な通信を行うために常時SSL(HTTPS)化しています。
