カムロボを組み立てる

micro:bitを使って、タミヤのカムプログラムロボット(通称カムロボ)を制御します。この記事では、カムロボを組み立てる手順を解説します。
カムプログラムロボットの制御(目次)
- 準備するもの
- 組み立てる前に
- カムロボを組み立てる・・・いま読んでいる記事
- micro:bitを組み込む
- カムロボを制御する(プログラミング)
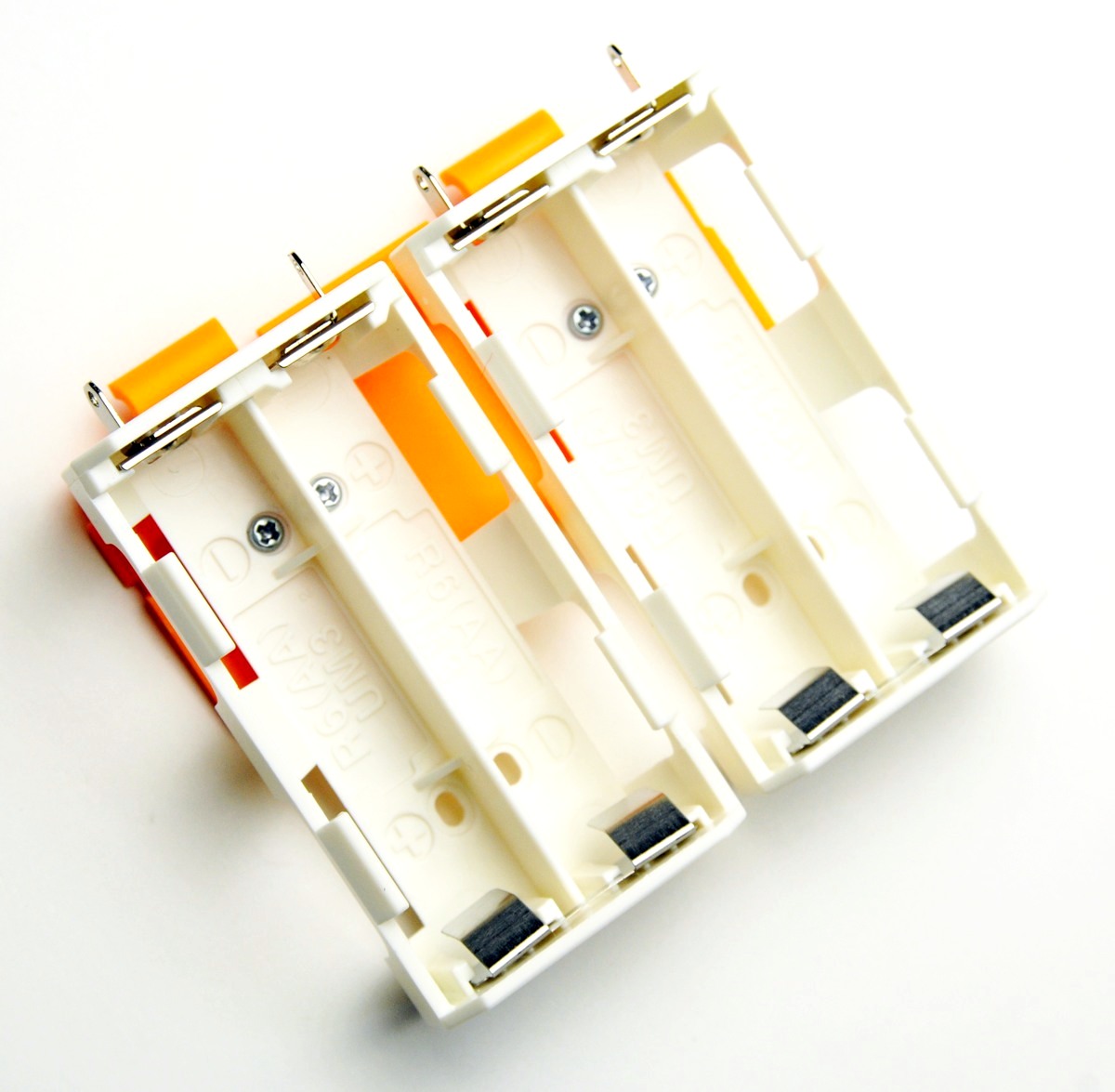
電池ボックスを組み立てる
まず、電池ボックスを二つ組み立てます。
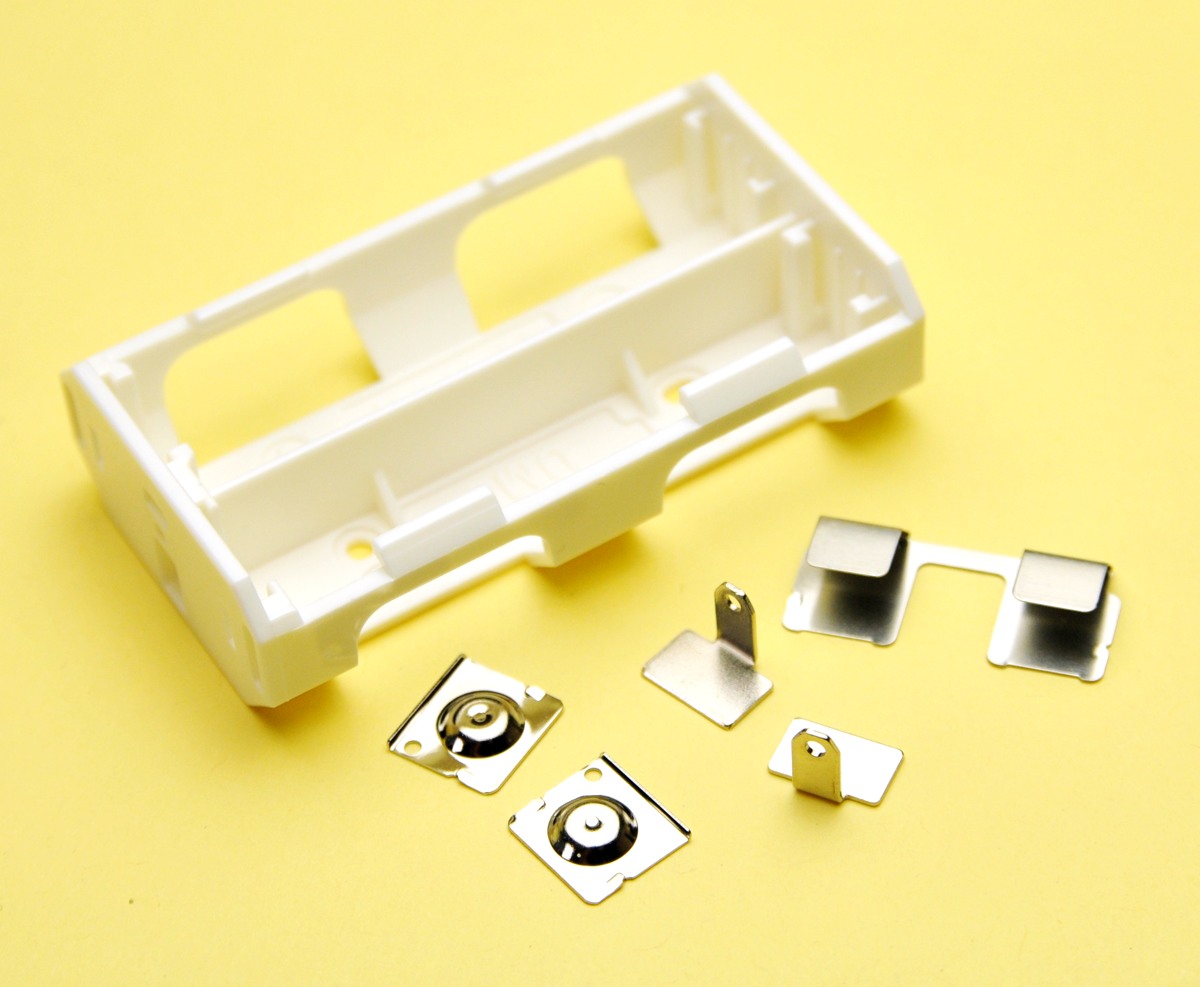
電池ボックスの組み立て
タミヤの楽しい工作シリーズ「No.151(ITEM 70151) 単三電池ボックス(2本用・逆転スイッチ付)」の電池ボックスを組み立てます。逆転スイッチは使用しません。
組み立てに必要なパーツは、電池ボックス・電池受け金具A・電池受け金具B・電池受け金具Cです。
組立説明書の【1】に従って、電池ボックスを二つ組み立てます。

カムロボを組み立てる
カムプログラムロボット(通称カムロボ)を組み立てます。
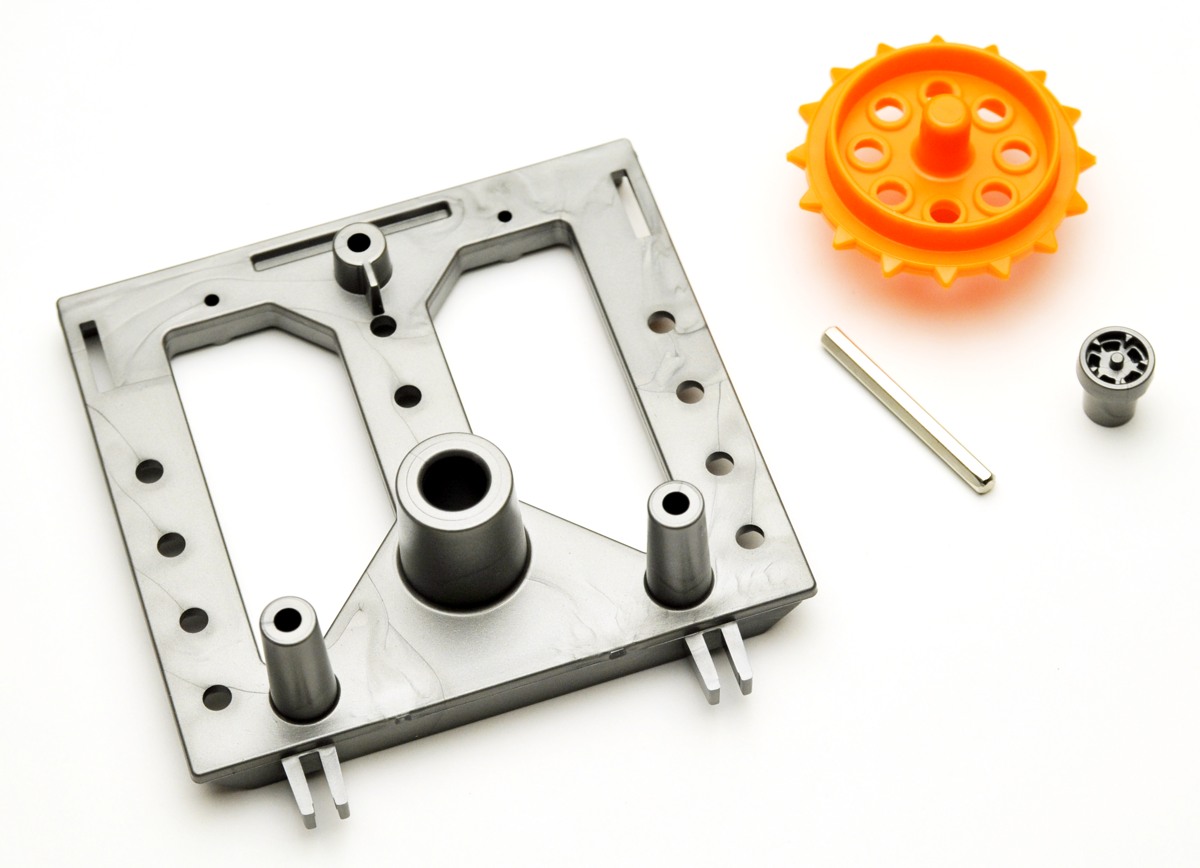
サイドフレームの組み立て
サイドフレームを二つ組み立てます。組み立てに必要なパーツは、A4・A5・W3・3×27mm六角シャフトです。
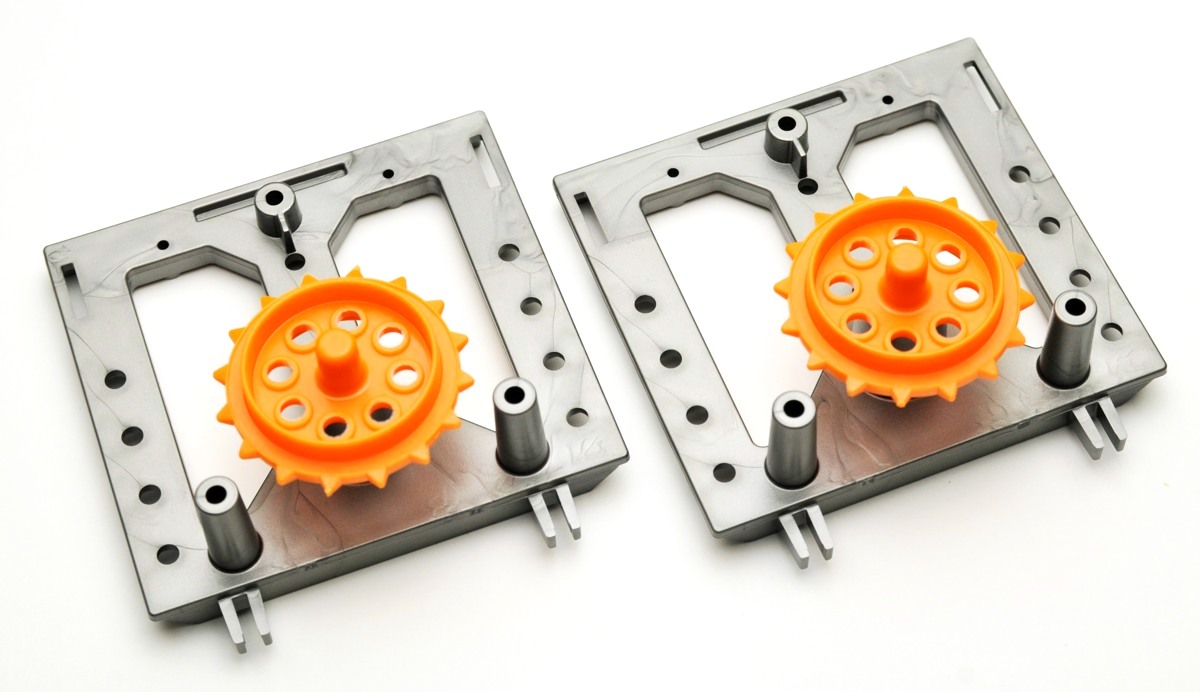
組立説明書の【2】を参考にしながら、サイドフレームを二つ組み立てます。
パーツB2を用意します。
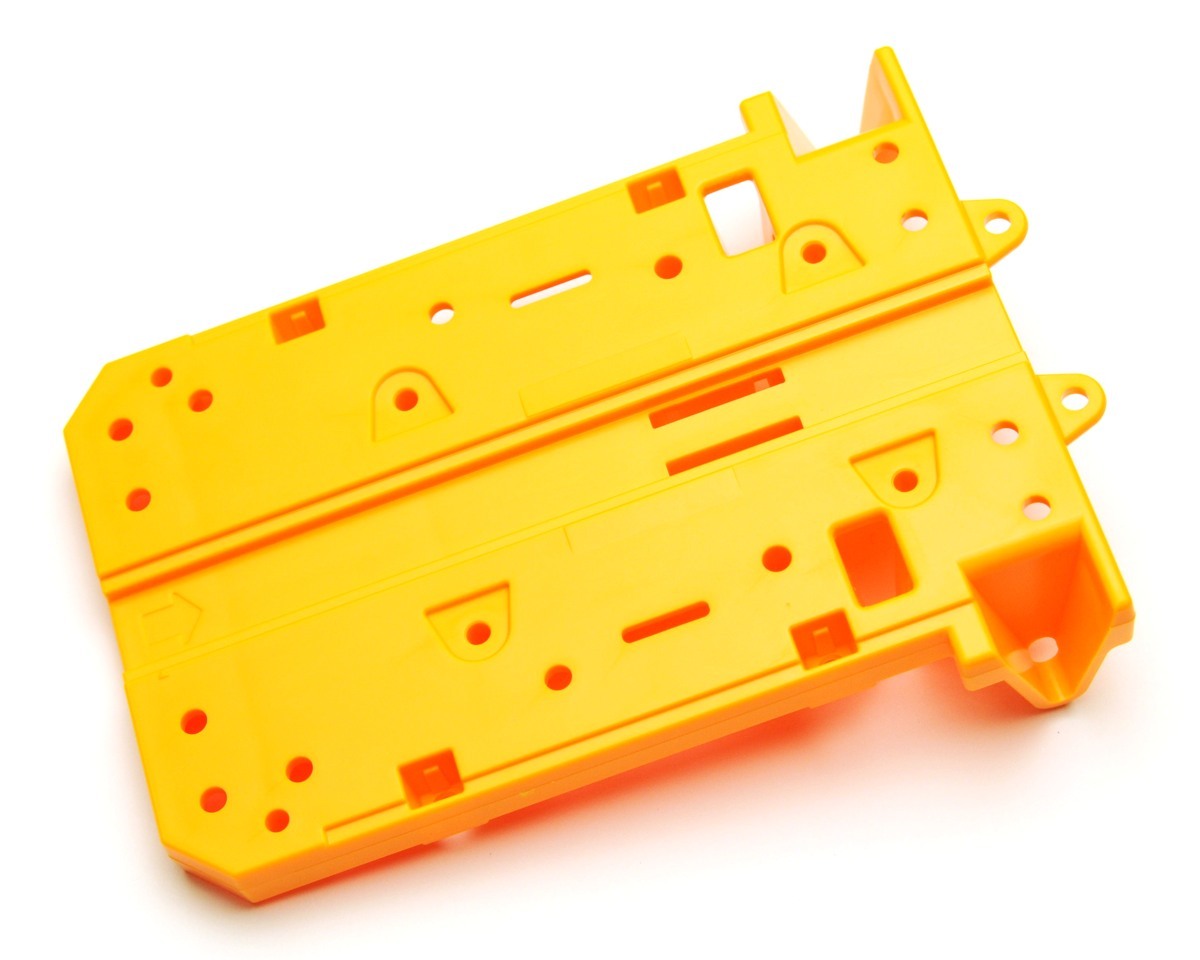
組立説明書の【2】を参考にしながら、3×8mmタッピングビス2本ずつ(合計4本)を使って、サイドフレームをパーツB2に取り付けます。
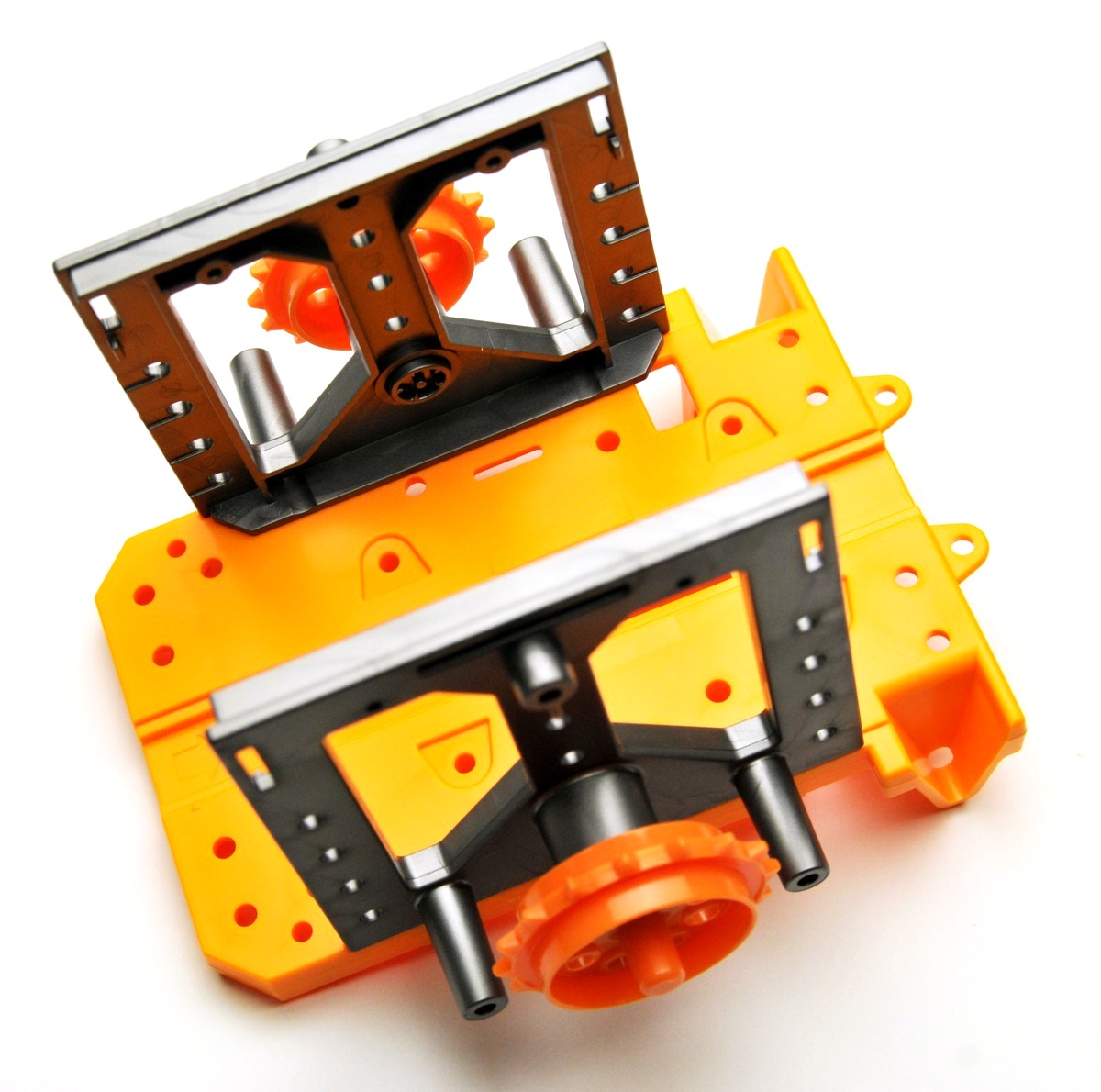
サイドフレームサポートの組み立て
サイドフレームサポートを組み立てます。組み立てに必要なパーツは、A2・A3です。

組立説明書の【3】を参考にしながら、サイドフレームサポートを取り付けます。取り付ける位置は、下から二つ目の穴です。パーツA3の向きに注意します。
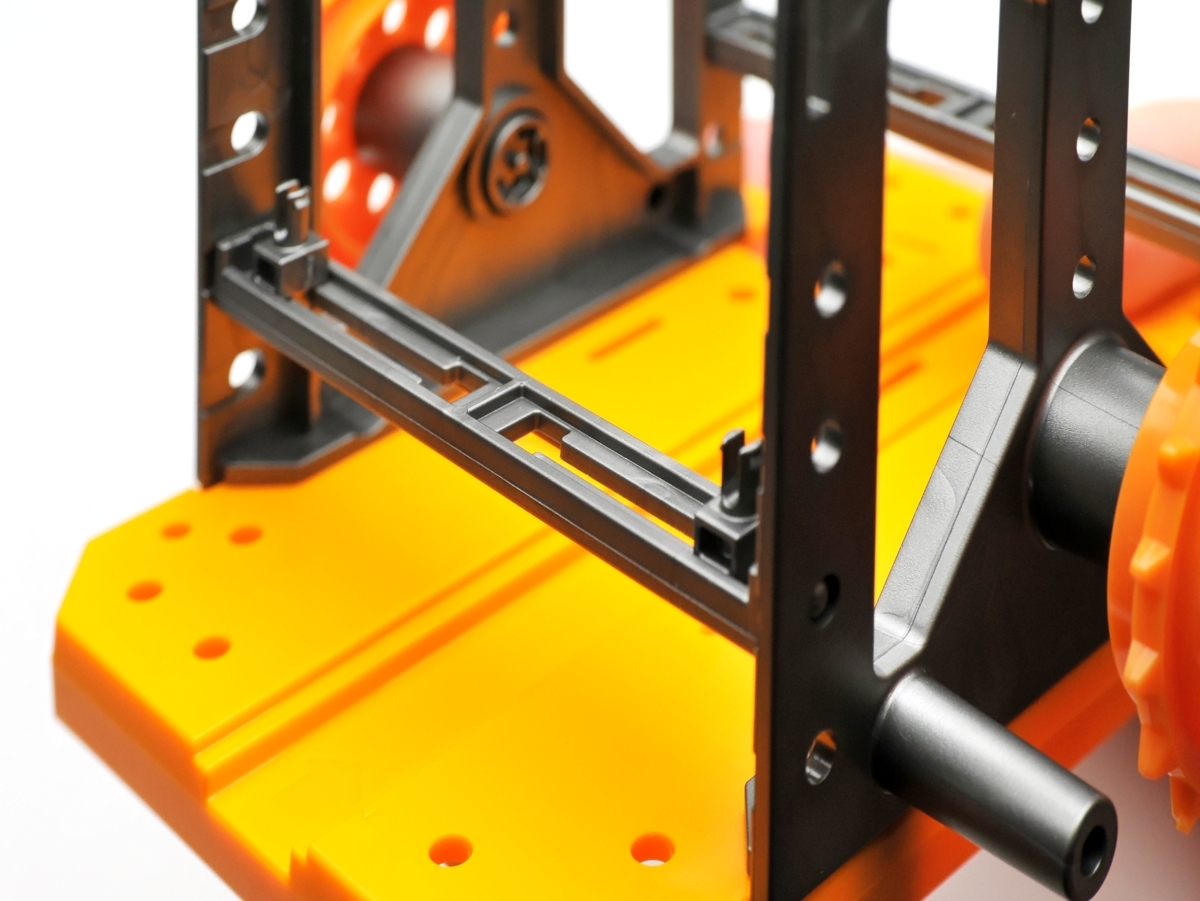
もう一方のパーツA3を取り付けます。取り付ける位置は、下から二つ目の穴です。パーツA3の向きに注意します。

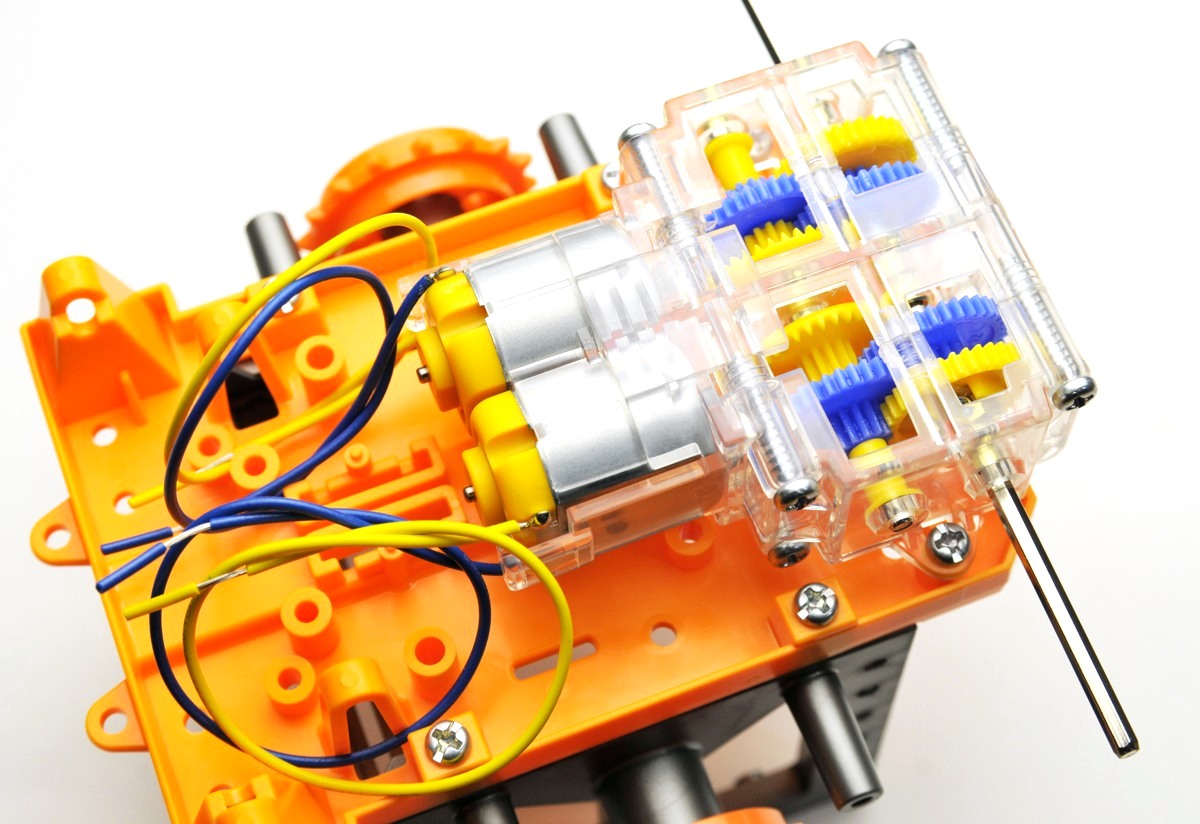
ギヤケースの組み立て
組立説明書の【4】に従って、ギヤケースを組み立てます。パーツが細かく、数も多いので、落ち着いてゆっくり組み立てましょう。
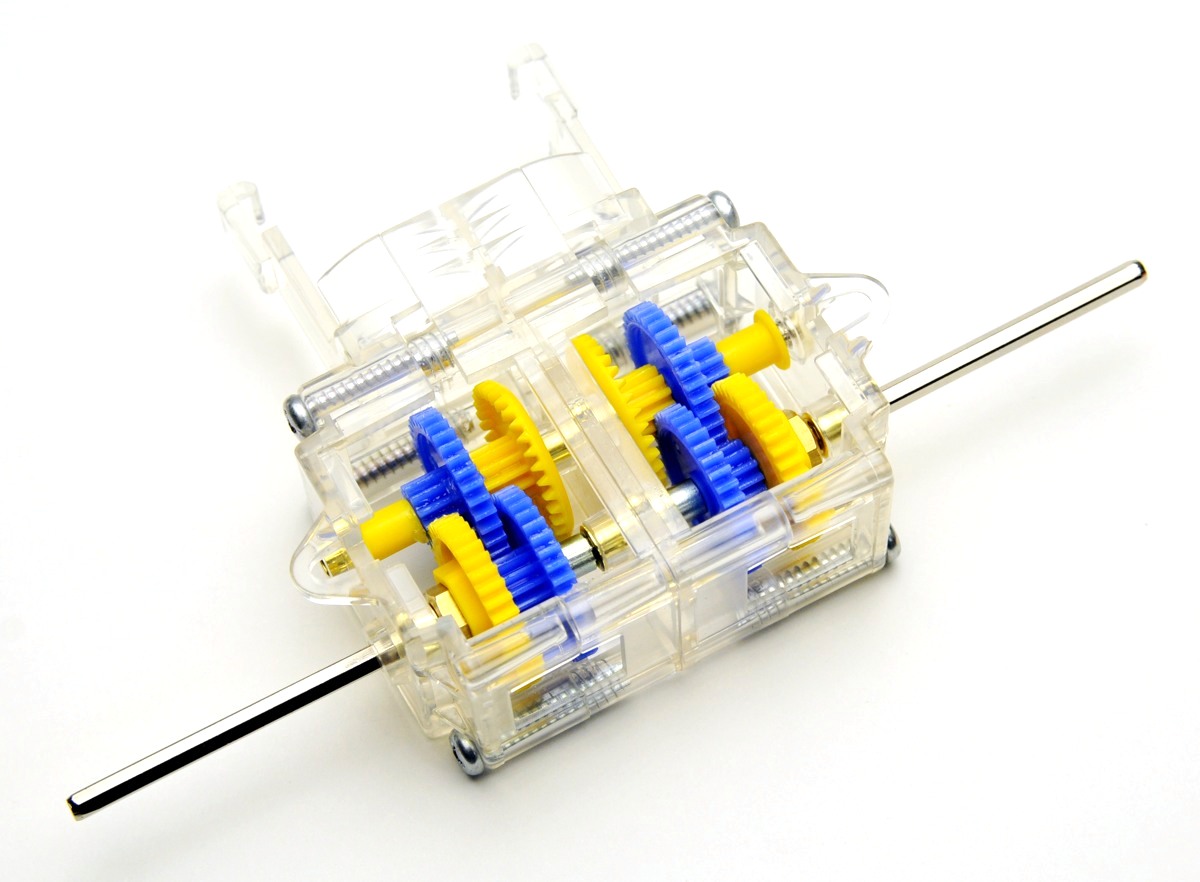
モーターにピニオンギヤを取り付けます。
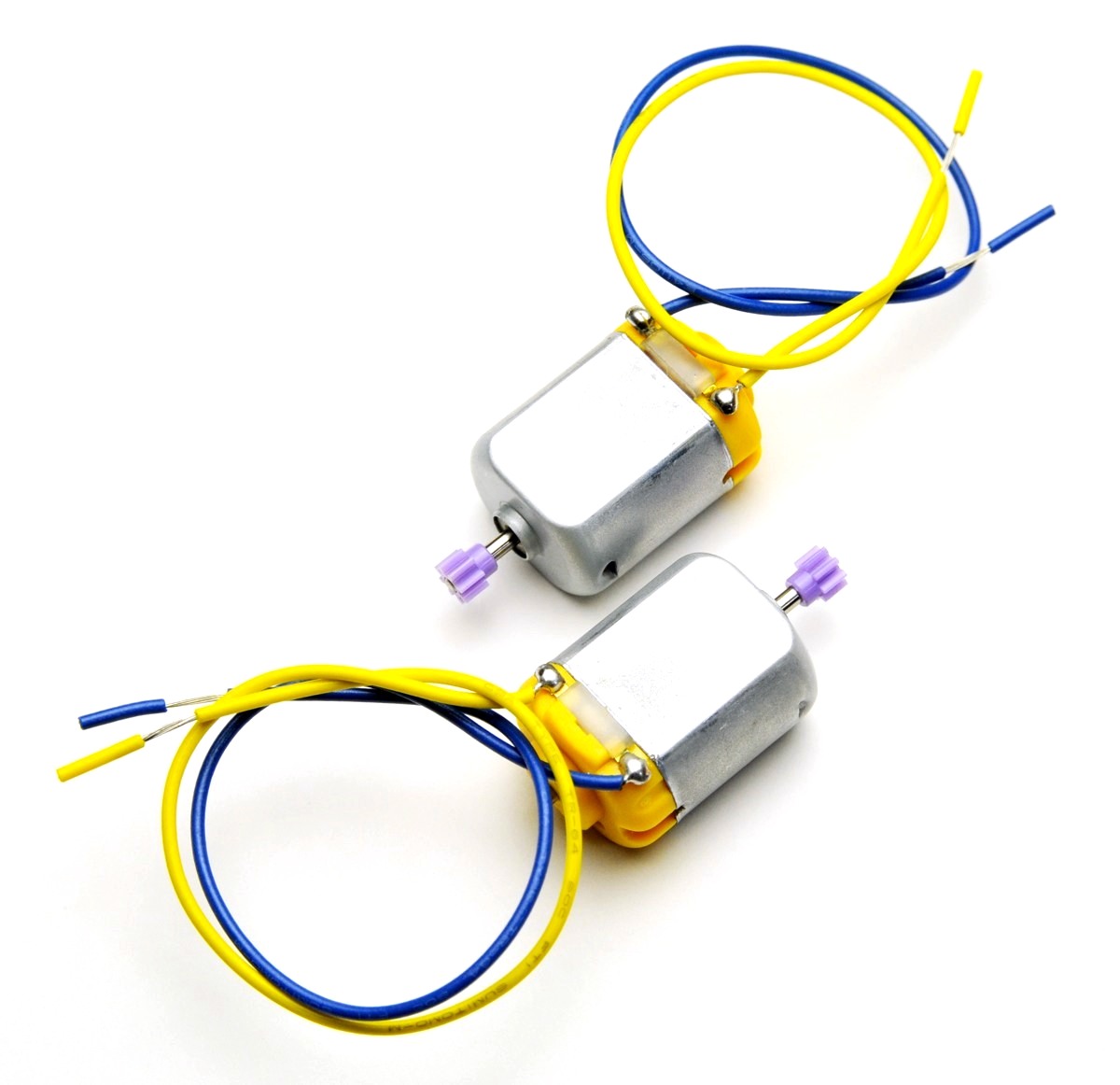
組立説明書の【5】を参考にしながら、モーターをギヤケースに取り付けます。3×8mmタッピングビス2本を使って、完成したギヤケースをパーツB2に取り付けます。
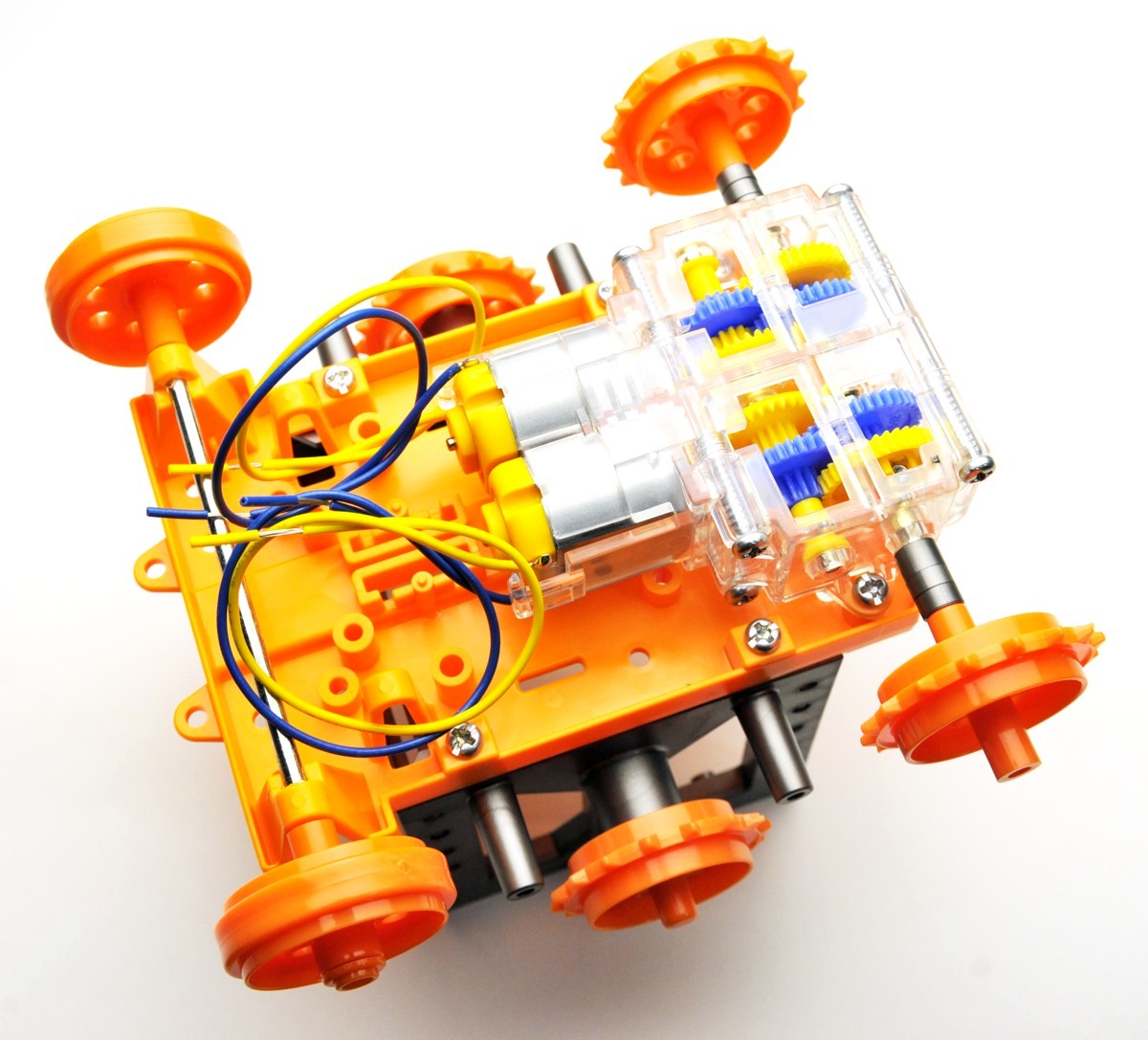
ホイールの取り付け
組立説明書の【9】に従って、ホイールを取り付けます。
履帯・パーツB5の取り付け
組立説明書の【10】に従って、履帯・パーツB5を取り付けます。
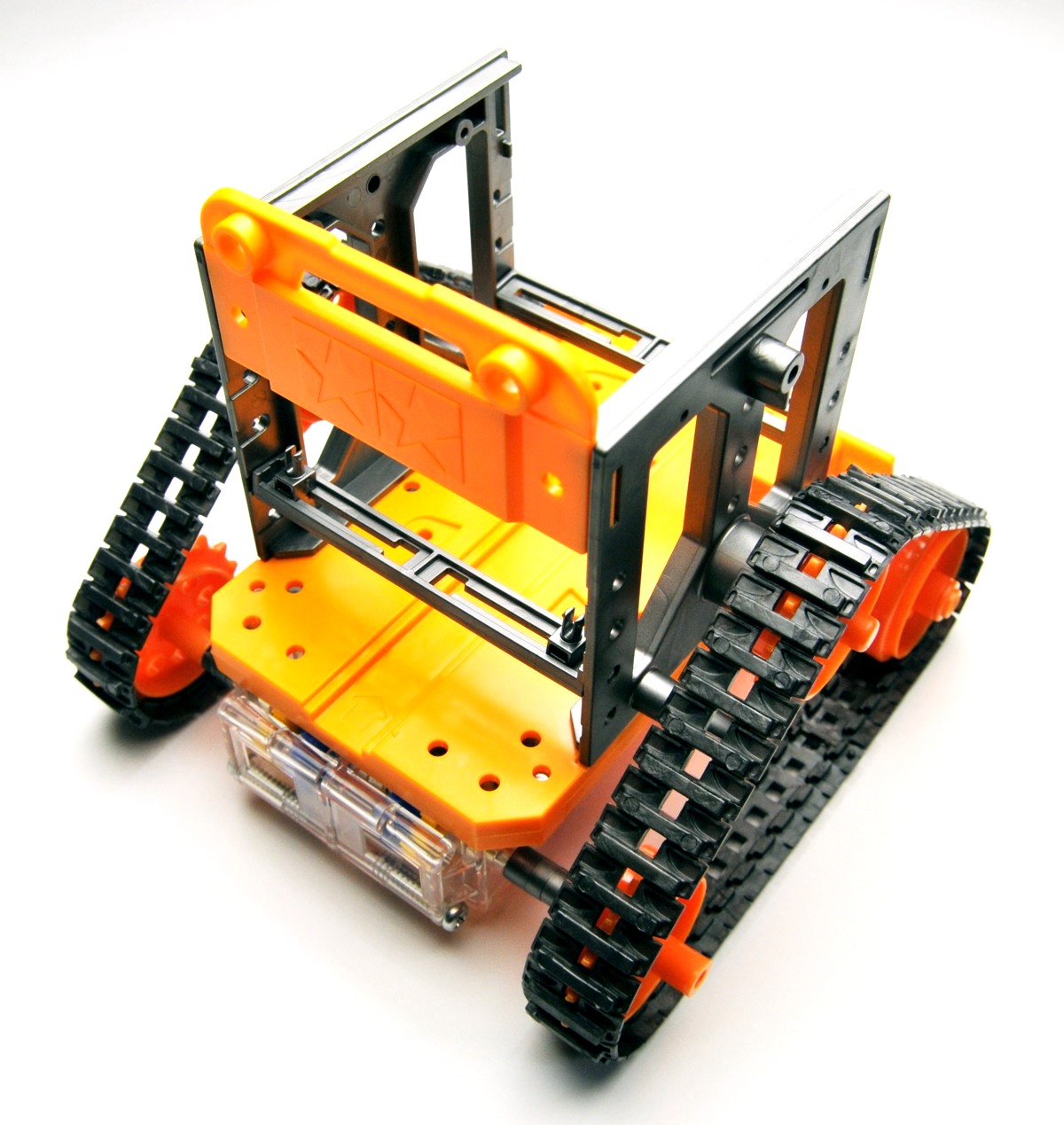
アーム・パーツA8の取り付け
組立説明書の【11】に従って、アームを組み立てます。組立説明書の【12】に従って、アームとパーツA8を取り付けます。

電池ボックスの取り付け
2×6mmタッピングビス2本ずつ(合計4本)を使って、電池ボックス二つをパーツB6に取り付けます。
ルーフの取り付け
組立説明書の【13】を参考にしながら、電池ボックスを取り付けたパーツB6をパーツB7へパチンと音がするまで押し込みます。完成したルーフを本体へ取り付けます。
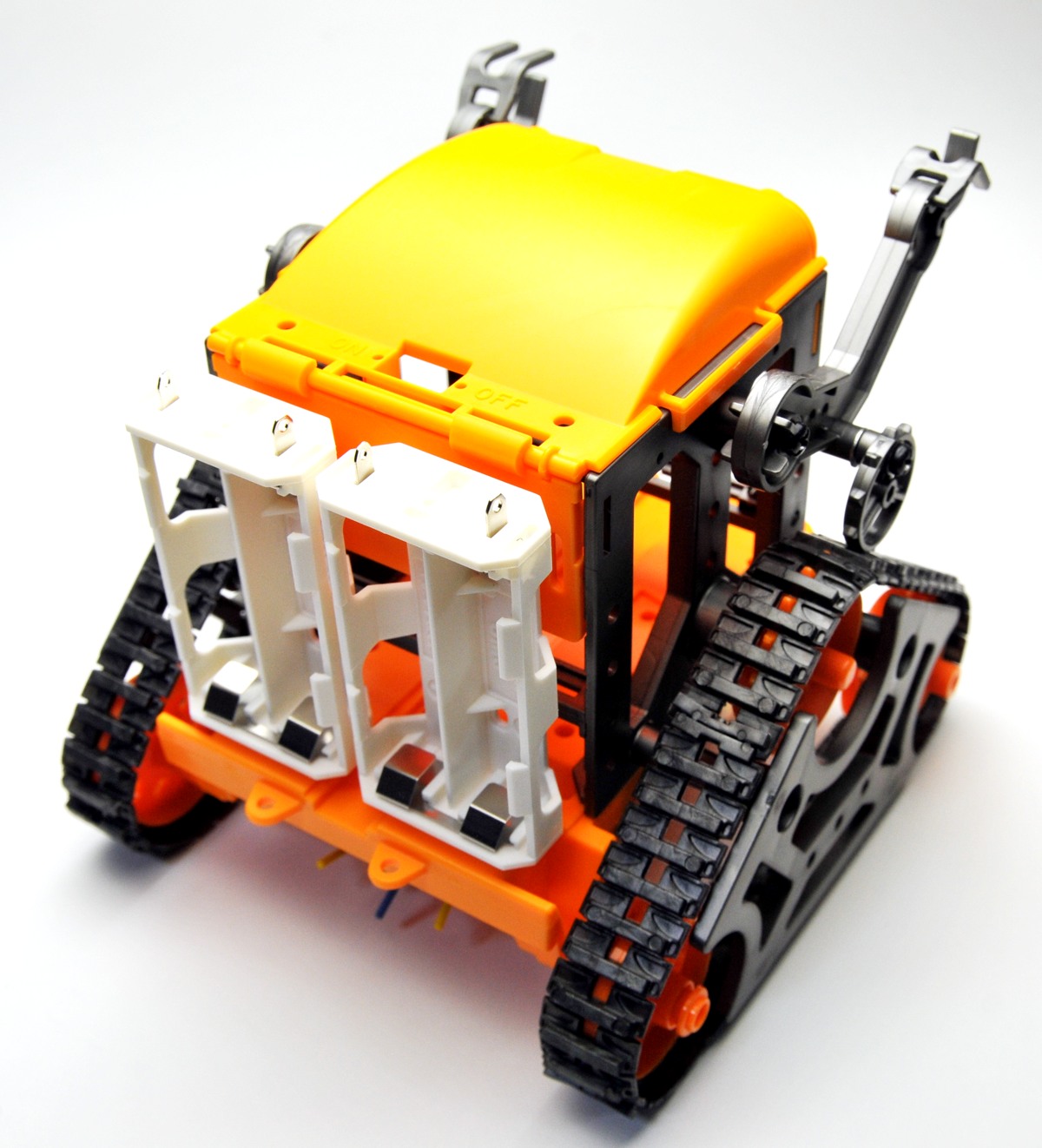
以上で、カムロボの組み立ては完成です。

おすすめ品



タミヤ プログラミング工作シリーズ No.01 マイコンロボット工作セット
超音波センサー、駆動回路を搭載したクローラー走行のロボット工作セットです。インストールされた走行プログラムを元に2つのモーターをコントロール、障害物を避けて自動走行します。











